(54) ГИДРАВЛИЧЕСКИЙ ПРИВОД ВЫВЕШИВАНИЯ
И ГОРИЗОНТИРОВАНЙЯ ГРУЗОВОЙ ПЛАТФОРМЫ
Изобретение относится к машиностро ению и может быть использовано в поаъ T:емыо-транспортных механизмах для вывешивания и горизонтирования грузовой платформы, расположенной на непоовижной ппошаохе.
По основному авт. св. Ms 731О88,
известен гидравлический привод вывешиГвания и горизонтирования грузовой пла-пформы, содержшций гидроопоры, установ- Q ленные на платформе, дозатор возвратво-поступательного п виження, реверсив- кый золотник и источник питания.
- --- ---. .f
Дозатор снабжен управляемыми o6pai 5 кыми клапанами, штоковые полости которых соединены с гидроопорами через дозатор и дополнительным золотником, связанным с источником питания и с поршневыми и штоковыми полостями уп- 20 равляемых обратных клапанов, а золотники горизонтирования &ьлолиены трехяозипионными и включены между полостями,гидроопор источником .питания fl Недостатком известного гидравлического привода является то, что для выве шивания и горизонтирования плап{)ормы требуется дозатор больших габаритов и i веса и большая продолжительность one- ралий горизонтирования платформы.
Цель изобретения - уменьшение габаритов дозатора и продЬлжи.тельности опёраиии горизонтирования.
Указанная цель достигается тем, что в приводе трехпозииионный золотник каждой гидроопоры вьшолнев с дополнительным выходом, сообшеннУм с пори1невой полостью другой гидроопоры. При этом двавыхода золотюпса каждой гидроопоры могут быть сообшены с поршневыми полостями смежных гидроопор, или один из выходов золотника каждой гидроопоры . сообщен со сливом, а другой - о поршневой полостью, расположенной по днагояали платформы гидроопоры. .
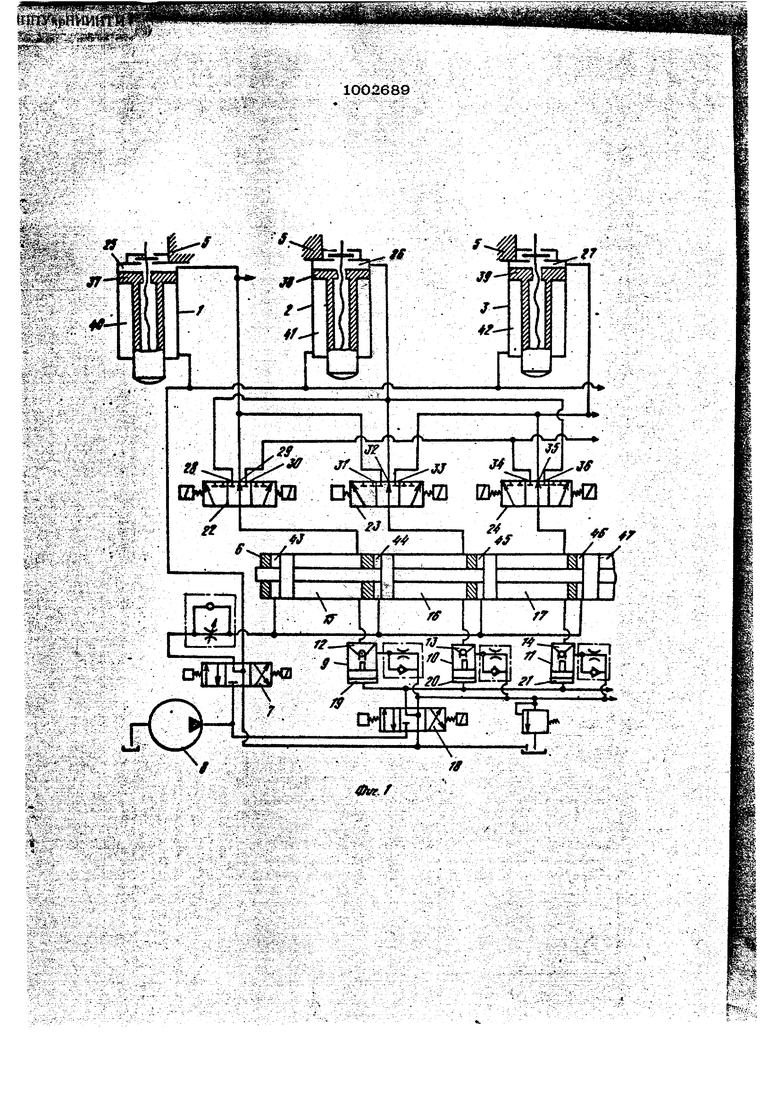
На фиг. 1 преоставлен гидропривод, в котором два выхода золотника каждой гвдроопоры сообпешл с полостями .
:-.;Л;:«|Г
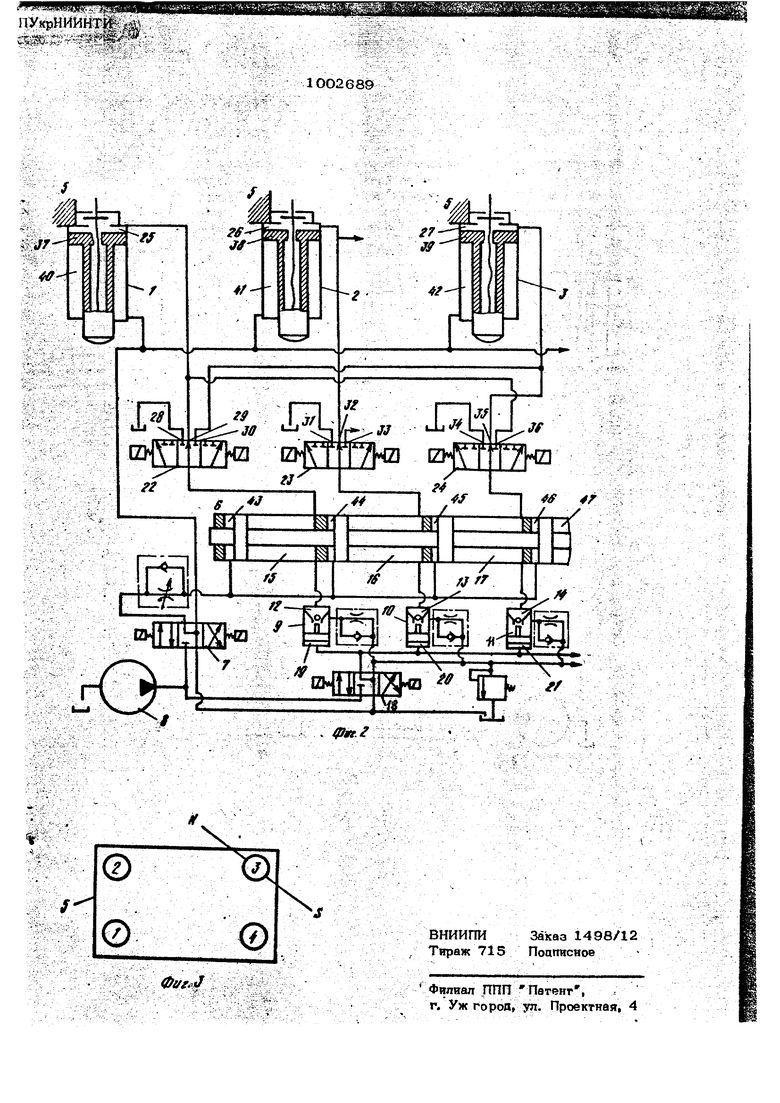
-,Mltf , «S iO иых гиароояор; на ф1.1г« 2 - гипропривоа, в кото|Х м оайн из выходов зояотника кйжпой г роопоры сообшеи do сливом; на фиг,-3 - вид грузовой платформы с гнпроопорами. Гиаравяический привод вывешивания и гор 13оитнроБания грузовой платформы содержит гипроопоры 1-4, уетановлениые на платформе 5, дозатор 6 возвратjHo-поступательного движения, реверсив ный зо{1ОТ11ПХ 7 и источник питания 8ф Дозатор 6 снабжен управляемыми обратными клапанами 9-11, штоковые польсти 12-14 KOTOpbix соединены с гидроопорами 1-3 через пластины 15-17 дозатора 6 соответственно. Дополнительный золотник 18 сообщен б источником питания 8 и с поришевыми 19-21 и штоковыми 12-14 полостями управления клапанов 9-11 соответственно. Золотники 22-24 горизонтирования вьтолнены трехпозииионными и включены между поршневыми полостями 25-27- гидроопор 1-3 соответственно и источником питания 8. Золотники 22-24 выполнены с выхо .дами 28, 29, ЗО, 31, 32, 33 и 34, 35, 36 соответственно. В варианте выполнения гидропривода по фиг. 1 выходы 28 и 36 золотников 22и 24 сообщены с полостью 26 гидроопоры 2, выходы 31 и 33 золотника 23- с полостью 25 гидрропоры 1 и полостью 27 гидрорпоры 3 соответствен но, а выходы 30 и 34 золотников 22 и 24с полостью гидроопоры 4, В варианте выполнения гидропривода (фиг.2) выходы 2 8, 31 и 34 аолот. НИКОВ 22, 23 и 24 сообщены со сливом ъьабза ЗЬ золотника 22 - с полостью 27 гидроопоры 3, выход 33 золотника 23 - с поршневой полостью гидроопоры ;4, выход 36 - с полостью 25 тидроопоры 1. Гидроопоры 1-3 содержат поршни 37.39 и штоковые полости 4О-42, соответственно. Дозатор 6 содержит полости ,43-46. Гидроопора 4 сообщена с полостью 47 дозатора 6. Гидравлический привод работает.следу юцим образом. При переключении золотника 7 в леву позишоо масло от источсшка питания 8 ..через открытый зоЛотник 7 поступает в полости 43-46 дозатора 6; Выт няемое из полостей 15, 16, 17 и 47 дозатора 6 маоло поступает через золотники 22 23 в 24 в верхние полости гидро опор , В результате чего осуществля ется опербпия вывешивания платформы 5 89 Горизонтнрование платформы 5 послеовательно по ее сторонам (фцг. 1) осуествляется с помощью зоЛотнйикЬв 22U 23 и 24 и золотника гидроопоры 4 (не показан). В случае наклона платформы 5 в сторону, например, гидроопоры 3 и гидроопоры 4 (левый край платформы расположен выше правого края) золотники 22 и 23 переключаются в правую позиишо, запирая масло в полостях 25 и 26 гидроопор 1 и 2 и полости 15 и 16 дозатора 6 с пориУневыми. полостями гидроопор 3 и 4 соответственно. Таким образом, при горизонтированки платформь1 5 в опору 3 масло поступает из полостей 16 и 17 дозатора 6, а в гидроопору 4 - из полостей 15 и 47, что позволяет уменьшить габариты дозатора и продолжительность операции горизонтирования. По достижении заданной точности горизонтирования золотники 22, 23 и 7 переключаются в среднее положение, а источник питания 8 выключается. Горизонтирование платформы последовательно по ее диагонали и стороне (фиг. 2) осуществляется с помощью золотникое 22, 23 и 24. В случае на- клона платформы 5 в сторону, например, гйдроопоры 1 золотник 24 переключается в правую позишпо, запирая масло в полости 27 гидроопоры 3 и сообщая полость 17 дозатора 6 с.гидроопорой 1. Таким образом, в гидроопору 2 и гидроопору 4 масло поступает соответственно из полостей 16 и 47 дозатора 6, а в гндроопору 1 - из полостей 15 и 17, вследствие чего платформа 5 начинает поворачиваться относительно оси N-S (фиг. 3), проходящей через гидроопрру 3. После того, как ось, проходящая через гидроопору 3 и гидроопору 4 займет горизонтальное положение, производится поворот платфррмы 5 относительно указанной оси. При этом золотник 24 н золотник гидроопоры 4 переключаются в левую позишпо, запирая масло в поршневых полостях гидроопоры 3 и гидроопоры 4 и сообщая полости 17 и 47 дозатора 6 со сливом. Гидросаоры 1 и 2 перемещаются вверх до тех пор, пока платформа не будет отгоризонтирована ПОЛНОСТЬЮ, после чегр золотники 24, 7 и золотник гидроопоры 4 переключ аются в среднее положение, а источник пнтания 8 выключается. Для ускания платформы 5 после . . включения источника питания 8; золотник 7 (фиг. 1) на некоторое время переклю10полостей гидроопор через золотиики 22, 23 и 24 пойости 15, IG, 17 и 47 асхзато| а в поступяет на спи. Такое выполнвнио гяпраппического npHDonft выооиигоония и горизонтиропония груэовоА платформы позволяот сократить габпритгл позатора и сократить продолжительность горизонтирования за счет того, что ОЛЯ перемешения штоков гид роопор испошгауетря рабочей зкидкости одновременно из двух полостей дозатора. изобретения ф О Р м у п а 1. Гидравлический привод вывешивания н горизонтирования грузовой плат формы по авт. св. N 731О88 о т л я чаю Ш и йен тем, что, с целыо 69 уменьшения габаритов дозатора и прадолжителыгости опорашш горизонтирования, трехпозиц ионный золотник каждой гидройпоры выполнен с дополнительным выхойом, сообщенным с поршневой дюлостыо другой гидроопоры. 2.Привод по п. 1, отличающийся тем, что два выхода золотника каждой гидроопоры сообщены с поршневыЙи полостями смежных гидроопор. 3.Привод по п. 1, о т л и ч а ю Ш и И с я тем, что один из выходов золотника каждой гидроопоры сообщен со сливом, а другой - с поршневой полостыо, расположенной по диагонали платформы гидроопоры. . Исто ники информации, . принятые во внимание при экспертизе 1. Авторское свидетельство СХЗСР № 731088, кл. F 15 В 11/22, 1978.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРАВЛИЧЕСКИЙ ПРИВОД ВЫВЕШИВАНИЯ И ГОРИЗОНТИРОВАНИЯ ГРУЗОВОЙ ПЛАТФОРМЫ | 2011 |
|
RU2464453C1 |
| Гидравлический привод вывешивания и горизонтирования грузовой платформы | 1978 |
|
SU731088A2 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД ВЫВЕШИВАНИЯ И ГОРИЗОНТИРОВАНИЯ ГРУЗОВОЙ ПЛАТФОРМЫ | 2011 |
|
RU2464452C1 |
| Гидравлический привод вывешивания и горизонтирования грузовой платформы | 1981 |
|
SU979726A1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД ВЫВЕШИВАНИЯ И ГОРИЗОНТИРОВАНИЯ ГРУЗОВОЙ ПЛАТФОРМЫ | 1996 |
|
RU2115030C1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД ВЫВЕШИВАНИЯ И ГОРИЗОНТИРОВАНИЯ ГРУЗОВОЙ ПЛАТФОРМЫ | 1995 |
|
RU2103566C1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД ВЫВЕШИВАНИЯ И ГОРИЗОНТИРОВАНИЯ ГРУЗОВОЙ ПЛАТФОРМЫ | 1996 |
|
RU2128789C1 |
| Гидравлический привод вывешивания и горизонтирования грузовой платформы | 1976 |
|
SU657184A1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД ВЫВЕШИВАНИЯ И ГОРИЗОНТИРОВАНИЯ ГРУЗОВОЙ ПЛАТФОРМЫ | 2004 |
|
RU2258160C1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД ВЫВЕШИВАНИЯ И ГОРИЗОНТИРОВАНИЯ ГРУЗОВОЙ ПЛАТФОРМЫ | 2011 |
|
RU2459123C1 |
- .,;.t Ч
1002689
ж ,
IV.
. 3 .
-f
% -r- -
m$
ШШ
1O02G89
