1
Изобретение относится к области машиностроения и может быть использовано в подъемно-транспортных механизмах для вывешивания и горнзонтироваппя грузовой платформы, расположенной па неподвпжпой плошадке.
По основному авт. св. № 657184 известен гидравлический привод вывешивания н горизоптирования грузовой платформы, содержаш,ий гидроопоры, установленные на платформе, дозатор возвратно-поступательного движенпя и дополнительный золотник, связанный с источником питания и с поршневыми и штоковыми полостями управляемых обратных клапанов.
Педостатком известного гидравлического привода является то, что для вывешивания и горизонтирования грузовой платформы требуется дозатор возвратно-поступательного движения больших габаритов и веса, так как объем каждой полости дозатора определяется суммой объемов, потребных на подъем (опускание) п горизоптирование платформы.
Цель изобретения - уменьшение габаритов дозатора путем исключения хода дозатора при горизонтировании платформы.
Указанная цель достигается тем, что золотники горизонтирования выполнепы трехпозиционными п включены между полостями гидроопор и источником пптания.
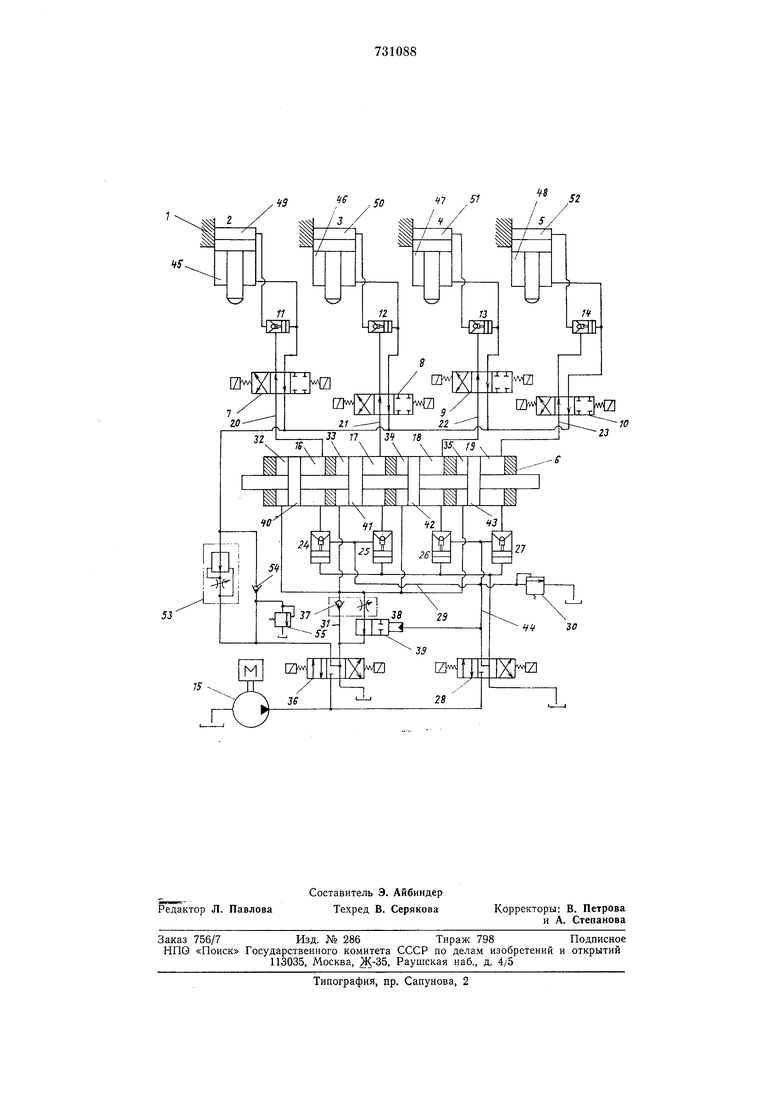
На чертеже представлена схема привода.
Гидравлический привод содерл ит Зстаповлеппые на платформе 1 гпдроопоры 2, 3, 4, 5, дозатор 6 возвратпо-поступательиого движеппя; гидроопорамп п дозатором включены тре.хпознциопные золотппки горизоитирования 7, 8, 9, 10 и односторонние гидрозамки И, 12, 13, 14; привод содержит источпнк пптания, выполненный в виде насоса 15. Площадь поршеньков гпдрозамков И, 12, 13, 14, выбпрается пз усJ5 ловия их открытия при опускании платформы. Число полостей дозатора равно колпчеству гидроопор. К полостям 16, 17, 18 и 19 дозатора 6, связанным гидромагистралямн 20, 21, 22 п 23 с гпдроопорамп 2, 3, 4 и 5, соответственно подсоединены штоковыми полостями управляемые обратные клапапы 24, 25, 26 п 27. Чпсло управляемых обратпых клапанов равно количеству гндроопор. Полости управляемых обратпых
о- клапапов 24, 25, 26 п 27 через золотник 28 связаны с насосом 15. К гидромагнстралп 29, соединяюш,ей штоковые нолостп управляемых обратных клапанов 24, 25, 26, 27 с золотником 28, подсоединен перепускной клап&н 30, соединяющий указанную гидромагистраль с масляным баком. К.лалан 30 настраивается на давление, потребное для открытня гидрозамков И, 12, 1о, 14 и осуществления горизонтирования нлатформы. b гидромагнстраль 31, сосдиияющую насос 15 с иолостями 32, 33, 34, 35 дозатора G, включены реверсивный золотник 36, служащий для изменения наиравлеиня движения дозатора 6 и гидроопор 2, 3, 4, 5, обратный клаиан 37 с регулируемым дросселем 38, иредназначенный для свободного нронускания масла от насоеа 15 к дозатору 6 ири вывешивании платформы и для ограиичспия скорости движения платформы ири ее оиускапии, и управляемый по давлению золотник 39, необходимый для запирания масла в иолостях 32, 33, 34, 35 дозатора 6 и фиксации тем самым иоршней 40, 41, 42, 43 дозатора 6 в крайнем нравом положении ирп выполнении операции горизоптирования. Полость управления золотника 39 связана с гпдромагистралью 44, соедипяющей золотник 28 со штоковыми иолостями управляемых обратпых клапанов 24, 25, 26, 27. Штоковые полости 45, 46, 47, 48 гпдрооиор 2, 3, 4, 5 и бесштоковые полости 49, 50, 51, 52 указанных гпдроопор через золотники 7, 8, 9, 10 и регулятор скорости 53 с обратным клапаном 54 связаны с золотииком 36. Регулятор скорости 53 с обратным клаианом 54 иредназпачен для регулировапня скорости движения гндрооиор ири горизоптпрованпп платформы п свободного пропускания масла от насоса 15 к штоковым нолостям гидроопор прп опускании платформы. Перепускной клапан 55 иредназпачен для ограничепия давления в гидроприводе в копце операции холостого выпуска штоков гидроопор. Ооъем каждой полости дозатора в иредлагасмом приводе рассчптывается только из условия обеспечения вывешивания платформы на задаппую величину. Гидравлический иривод иозволяет использовать в качестве исполнительпых оргапов гидровинтовые п гпдроклииовые опоры, а так же, как п в известном приводе, использовать дозатор как многоходовой элемент, одпако в иоследием случае парушается непрерывность движения платформы п увеличивается общее время работы привода. Гидравлический иривод работает следующим образом. Операцпя горизонтпрования платформы 1 относительно ее диагоналей, проходящих через гидроопоры 2, 4 и гидрооноры 3, 5, производится с помощью золотников 7, 8, 9, 10. Папример, горизонтирование илатформы отиосительно диагонали, проходян ей через гидроопоры 2, 4 при наклоне платформы в сторону гпдроопоры 5, нроизводится в следующей последовательпости. Золотники 7 и 9 переключаются в правую позицию, зо.ютник 8 переключается в левую позицию, а золотник 10 остается вереднем положении. Тогда прп включении золотиика 28 в левую позицию масло от насоса 15 через золотппк 28, управляемые обратные клапаны 25, 27, полостп 17 и 19 дозатора 6, золот1пп п 8 и 10 и гпдрозамки 12 и 14 поступает соответственно в щтоковую полость 46 гидроопоры 3 и бесштоковую полость 52 гпдроопоры 5, одповремеппо открывая гидрозамок 12 гидроопоры 3 н осуществляя тем самым горизонтпровапис платформы 1 отпосительпо диагонали, проходяиаей через гидрооиоры 2 и 4. Из И1ТОКОВОЙ полостп 48 гидрооноры 5 и бесщтоковой нолостп 50 гидроопоры 3 масло через золотппки 10 и 8, регулятор скорости 53 и золотник 36 иостуиает в бак. При этом скорость горпзоптироваппя платформы 1 определяется пастройкой регулятора скорости 53. Поскольку расход масла через регулятор скорости меньше производительности насоса 15, избыток мас.ча через клапан 30 стравливается в бак. Апалогпчпым образом пропзводится горизоитировапие платформы отпосптельпо диагонали, проходящей через гпдроопоры 3 п 5. Прп выполнеппп операцпп горизонтнрования поршни 40, 41, 42, 43 дозатора 6 остаются в крайнем правом положении, так как под действием давления масла, определяемого пастройкой клапапа 30, золотппк 39 переключается в правую нозпцию, запирая объем масла, паходящийся в полостях 32, 33, 34, 35 дозатора 6. По достпжении заданной точностп горизоптироваппя платформы все золотники переключаются в исходное положеппе, а пасос 15 выключается. Пагрузка от веса платформы воспринимается объемом масла, заключенным в поршневых полостях гпдроопор 2, 3, 4, 5, которые заперты гпдрозамкамн 11, 12, 13, 14. Па дайной операции ход дозатора не используется. Таким образом, использоваппе трехпозпцпопных золотппков, включенных между полостямп гидроопор и нсточппком пптання, позволяет умепьшить габариты li вес дозатора. Формула изобретения Гидравлический привод вывешиваипя и горпзоптировапия грузовой платформы по авт. св. СССР № 657184, отличающийс я тем, что, с целью уменьшения габаритов дозатора, золотники горпзоитирования выполнены трехпозицпонными п включены между полостями гидроопор и источником иитания.
че
. W
fS
S2
51
I /
is/
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРАВЛИЧЕСКИЙ ПРИВОД ВЫВЕШИВАНИЯ И ГОРИЗОНТИРОВАНИЯ ГРУЗОВОЙ ПЛАТФОРМЫ | 1996 |
|
RU2128790C1 |
| Гидравлический привод вывешивания и горизонтирования грузовой платформы | 1976 |
|
SU657184A1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД ВЫВЕШИВАНИЯ И ГОРИЗОНТИРОВАНИЯ ГРУЗОВОЙ ПЛАТФОРМЫ | 1995 |
|
RU2103566C1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД ВЫВЕШИВАНИЯ И ГОРИЗОНТИРОВАНИЯ ГРУЗОВОЙ ПЛАТФОРМЫ | 1996 |
|
RU2128789C1 |
| Гидравлический привод вывешивания и горизонтирования грузовой платформы | 1980 |
|
SU918584A1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД ВЫВЕШИВАНИЯ И ГОРИЗОНТИРОВАНИЯ ГРУЗОВОЙ ПЛАТФОРМЫ | 2011 |
|
RU2464452C1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД ВЫВЕШИВАНИЯ И ГОРИЗОНТИРОВАНИЯ ГРУЗОВОЙ ПЛАТФОРМЫ | 2011 |
|
RU2464453C1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД ВЫВЕШИВАНИЯ И ГОРИЗОНТИРОВАНИЯ ГРУЗОВОЙ ПЛАТФОРМЫ | 2011 |
|
RU2459123C1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД ВЫВЕШИВАНИЯ И ГОРИЗОНТИРОВАНИЯ ГРУЗОВОЙ ПЛАТФОРМЫ | 1996 |
|
RU2115030C1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД ВЫВЕШИВАНИЯ И ГОРИЗОНТИРОВАНИЯ ГРУЗОВОЙ ПЛАТФОРМЫ | 2004 |
|
RU2258160C1 |
t1
4Жn
ЧМН
