1
Изобретение относится к области .машиностроения и может быть использовано в подъемно-транспортных механизмах для вывешивания и горизонтирования грузовой платформы, расположенной на .неподвижной площадке.
Известен гидравлический привод перемешения грузовой платформы, содержащий гидрооноры, установленные на платформе, дозатор возвратно-поступательного движения, реверсивный золотник и источник питания, связанные гидромагистралями. Применение дозатора возвратно-поступательного движения позволяет получить высокую точность синхронизации движения гидроопор при высоком кпд.
Недостатком известного гидропривода является то, что для вывешивания и горизонтирования грузовой платформы требуется дозатор возвратно-поступательного движения больших габаритов и веса, так как объем каждой полости дозатора определяется суммой объемов, потребных на холостой ход гидроопоры, т. е. выпуск Н1тока до контакта с грунтом или убирание штока, подъем или опускание платформы, а также горизонтирование платформы.
Целью изобретения является уменьшение габаритов и веса дозатора возвратнопоступательного движения путем исключения его хода при холостых ходах гидроопор. Цель достигается тем, что дозатор возвратно-поступательного движения снабжен управляемыми обратными клапанами со штоковыми полостями, соединенными с гидроопорами через дозатор возвратно-поступательного движения, и дополнительным золотником, связанным с источником питания
и с поршневыми и штоковыми полостями управляемых обратных клапанов.
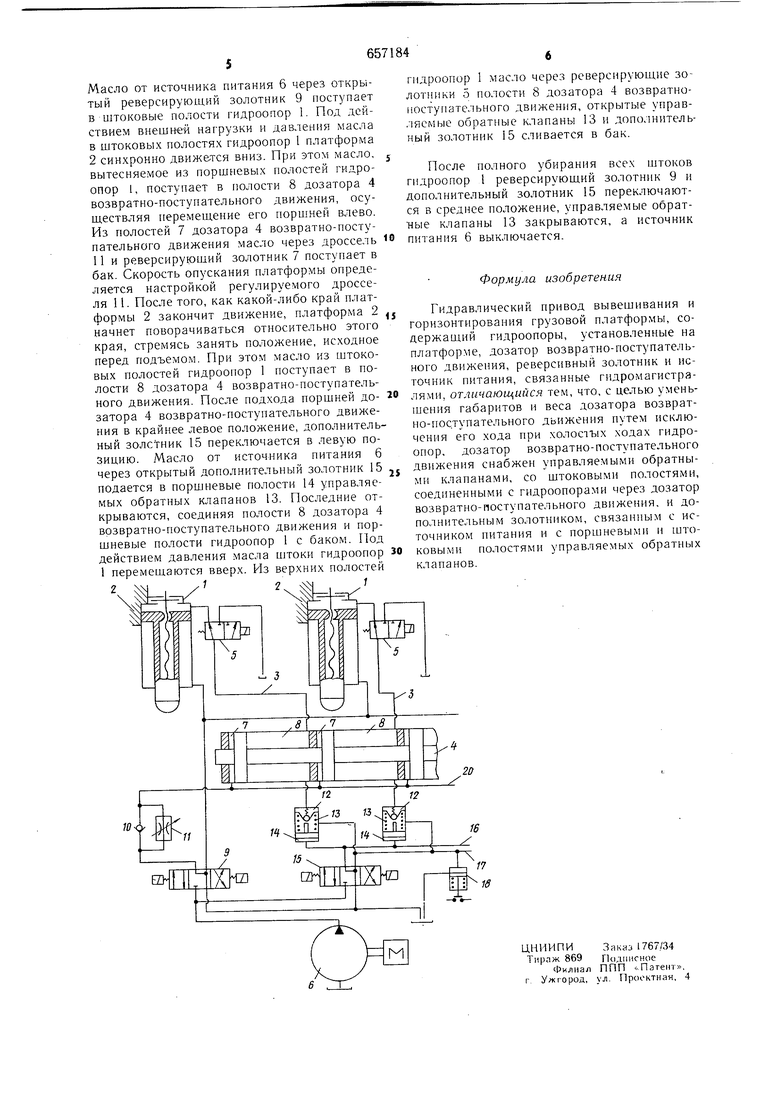
На чертеже представлена схема гидравлического привода вывешивания и горизоптирования грузовой платформы.
Гидравлический привод вывеишвания и горизонтирования грузовой платформы содержит гидроопоры 1. выполненные гидровинтовыми, установленные на платформе 2 и связанные гидромагистралями 3 с дозатором 4 возвратно-поступательного движения.
причем в каждой гидромагистрали 3 установлен золотник горизонтирования 5 и источник питания 6. Число полостей 7 и 8 дозатора 4 возвратно-поступательного движения равно количеству гидроопор 1. Источник питания 6 соединен с полостями 7 дозатора 4 через реверсивный золотник .9, который служит для изменения направления движения дозатора 4 и гидроопор 1, и обратный кла-пан 10 с регулируемым дросселем 11, предназначенные для свободного пропуска масла от источника питания 6 к дозатору 4 при подъеме платформы -2 и для ограничения скорости движения платформы при ее опускании. К полостям 8 дозатора 4, связанным гидромагистралями 3 с гидро. опорами 1, подсоединены штоковыми полостями 12 управляемые обратные клапаны 13. Число управляемых обратных клапанов 13 равно количеству гидроопор 1. Поршневые 14 и штоковые 12 полости управляемых обратных клапанов 13 через дополнительный 11зодотник 15 связаны с источником питания 6; гидролипии 16 и 17 соединяют поршневые 14 и штоковые 12 полости управляемых обратных клапанов 13 с соответствуюшими полостями управляемых обратных клапанов (на черт, не показаны). К гидромагистрали, соединяюшей штоковые полости 12 управляемых обратных клапанов 13 с дополнительным золотником 15, подсоединен перепускной клапан-датчик 18. Клапан-датчик 18 настроен па величину давления, несколько превышаюшую величину давления, потребную для выполнения операции холостого выпуска штоков гидроопор до контакта с грунтом перед подъемом платформы 2. Штоковые полости гидроопор I через реверсивный золотник 9 связаны с масляным баком, Гидролинии 19 и 20 соедипжот соответственно штоковые полости показанных и не показанных па чертеже гидроопор с масляным баком, а также показанные и пе показанные на чертеже полости 7 дозатора 4 возвратно-поступательного движения с гидромагистралью, связываюшей реверсирующий золотник 9 с дозатором 4. Для исключения воз.можности попадания воздуха в гидросистему при неработающем источнике питания 6 масляный бак расположен выше верхней точки гидросистемы. При использовании бака с наддувом, бак можно разместить в любом месте платформы. Гидросистема содержит фильтры, предохранительные клапаны и устройство для разгрузки источника питания (па черт, не показано). Объем каждой полости дозатора 4 возвратно-поступательного движения рассчитывается только из условия обеспечения горизонтирования и подъема платформы на заданную величину. Гидравлический привод вывешивания и горизонтировапия грузовой платформы работает следующим образом. В начальный момент все золотники занимают позиции, как показано на чертеже. После включения источника питания б дополнительный золотник 15 переключается в правую позицию. Масло от источника питания 6 через дополнительный золотник 15, управляемые обратные клапаны 13 и полости 8 дозатора 4 возвратно-поступательного движения поступает в поршневые полости гидроопор 1, в результате чего поршни гидроопор 1 начинают перемеодаться вниз. Из штоковых полостей гидроопор 1 масло через реверсивный золотник 9 вытесняется в бак. Таким образом, производится холостой выпуск штоков гидроопор 1 до касания с грунтом. После того, как все штоки гидроопор 1 коснутся грунта, давление в гидроприводе, повышается до величины, на которую настроен клапан-датчик 18. При срабатывании клапана-датчика 18 подается электрический сигнал на перевод дополнительного золотника 15 в среднее положение, в резульI гтате чего штоковые полости 12 управляемых обратных клапанов 13 соединяются со сливом и они закрываются. На этом заканчивается операция холостого выпуска штоков гидроопор 1 до касаНИЯ с грунтом, в ходе этой операции поршни дозатора 4 возвратно-поступательного движения остаются неподвижными. При переключении реверсивного золотника 9 в левую позицию масло .от источника питания б через открытый реверсивный золотник 9 и обратный клапан 10 поступает в полости 7 дозатора 4 возвратно-поступательного движения, осуществляя движение его поршней влево. Вытесняемое из полостей 8 дозатора 4 масло поступает через золотники горизонтирования 5 в поршневые полости гидроопор 1, в результате чего осуществляется операция вывешивания грузовой платформы. Горизонтирование платформы 2 осуществляется с помошью золотников горизонтирования 5. При переключении золотников горизонтирования 5, связанных с опережаюшими гидроопорами 1 в правую позицию, масло из соответствующих полостей 8 яозатора 4 возвратно-поступательного движения поступает в бак. Отстающие гидроопоры продолжают синхронизированное движение вверх. По достижении заданной точности горизонтирования золотники горизонтирования 5 переключаются в левую позицию. После подъема платформы на заданную величину рабочего хода, реверсирующий золотник 9 переключается в среднее положение, а источник питания 6 выключается. Нагрузка от веса платформы воспринимается винтами гидроопор I. Следует отметить, что гидравлический привод позволяет производить Горизонтирование как до, так и в процессе синхронизированного подъема платформы. Для опускания платфор.мы 2 после включения источника питания 6 реверсируюший золотник 9 па некоторое время переключается в левую позицию для разгрузки винтов гидроопор I, а затем - в правую позицию.