(54) УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УГЛОВ ПОВОРОТА
ОБЪЕКТА
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения углов поворотаОб'ЕКТА | 1979 |
|
SU853381A1 |
| ЛАЗЕРНЫЙ ДАЛЬНОМЕР | 2005 |
|
RU2299402C1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОЙ ОРИЕНТАЦИИ ОБЪЕКТОВ | 2009 |
|
RU2408840C1 |
| Фотоэлектрическое автоколлимационное устройство | 1979 |
|
SU783743A1 |
| ЛАЗЕРНЫЙ ЦЕЛЕУКАЗАТЕЛЬ-ДАЛЬНОМЕР | 2012 |
|
RU2522784C1 |
| СПОСОБ И УСТРОЙСТВО АЗИМУТАЛЬНО-УГЛОМЕСТНОЙ ИНДИКАЦИИ В ОПТИКО-ЛОКАЦИОННЫХ СИСТЕМАХ | 2015 |
|
RU2628301C2 |
| МНОГОФУНКЦИОНАЛЬНАЯ ОПТИКО-ЛОКАЦИОННАЯ СИСТЕМА | 2005 |
|
RU2292566C1 |
| Автоколлимационное устройство для бесконтактного измерения профиля полированных поверхностей | 1986 |
|
SU1394035A1 |
| Датчик угла скручивания | 1990 |
|
SU1776989A1 |
| ПРИЦЕЛ-ПРИБОР НАВЕДЕНИЯ С ЛАЗЕРНЫМ ДАЛЬНОМЕРОМ | 2011 |
|
RU2464601C1 |
1
Изобретение относится к измерительной технике и может использоваться щгя измерения углов поворота объекта в ма- щино-и авиастроении.
Известно фотоэлектрическое устройство для измерения угловых разворотов, содержащее коллиматор, источник излучения, расположенный в афокальной плоскости объектива коллиматора, ел едящую, систему , фотоприемник, который распотожен в фокусе объектива колтгаматора, датчик угла, электрически связанный со следящей системой и источником излучения, а также измерительный прибор, усганавпиваемый на измеряемом объекте и вклю- 5 чающий объектив, следящую ситему и датчик угла Ш.
Недостатком данного устройства является незначительный диапазон измеряемых углов.20
Наиболее близким к изобретению по технической сущности является устройство для измерения углов поворота объекта, содержащее источник излучения и последовательно располсзженные по ходу его лучей коллиматор с маркой, отражательную призму, телескопическую систему, жестко связанную с призмой и имеющую увеличение, близкое к единице, компенсатор, выполненный в виде второй телескопической системы, расположенной таким образом, что общее увеличение телескопической системы и компенсатора равно единице, и объектив 2.
Недостатком известного устройства является низкая производительность измерений, обусловленная визуальным способом регистрации углов поворота объекта.
Цель изобретения - повышение производительности измерения при сохранении диапазона измеряемых углов.
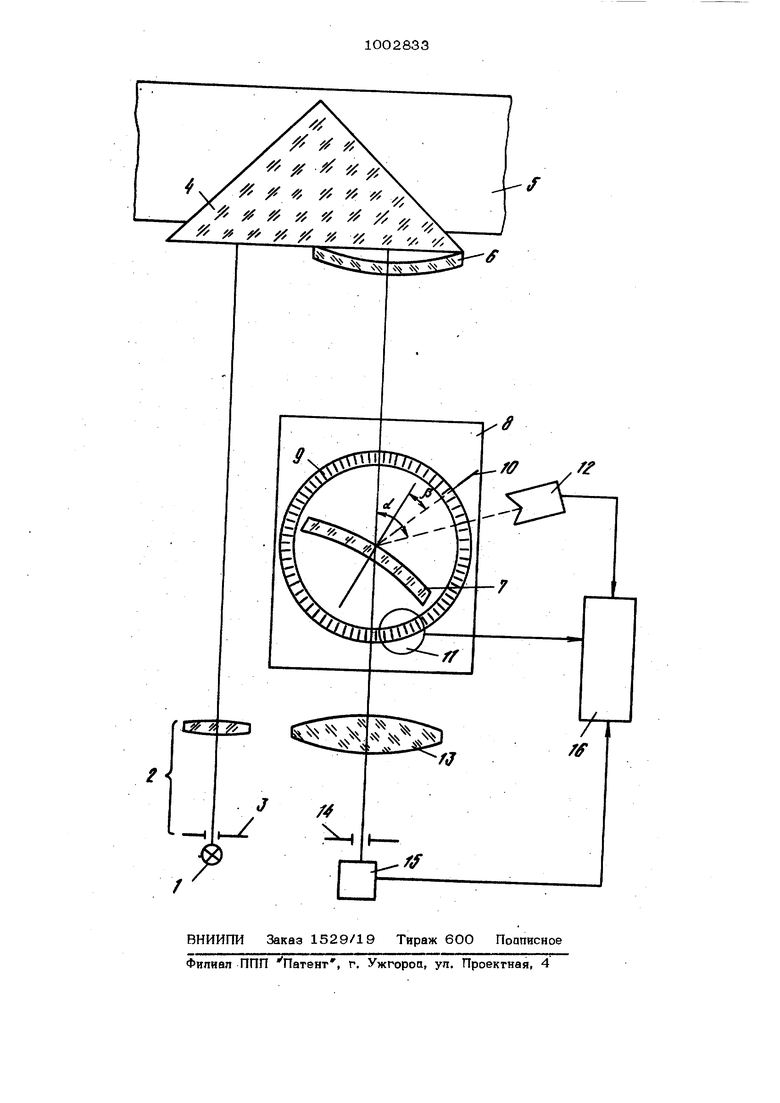
Цель достигается тем, что устройство для измерения углов поворота объекта снабжено лимбом, жестко соединенным с компенсатором, установленным с воамаж.ностью вращения вокруг оси, перпендикулярной оптической оси устройства, узпом. 3 считывания, фотоприемным блоком, оптачески сопряженным с маркой, датчиком исходного положения компенсатора и счет чиком импульсов, входы которого электри Чески соединены соответственно с выходами датчика исходного положения компенсатора, узла считывания и фотоприемного блока, лимб и узел считывания обг разуют датчик угла разворота компенсатора, а датчик исходного положения компенсатора установлен таким образом, что нормаль к его центру составляет с плоскостью, образованной оптической осью устройства и осью вращения лимба, угол Об 1 выбираемый из условия .(i, гце V - максимально возможный угол поворота объекта; - угол между плоскостями, образованными оптической осью компенсатора и осью вращения лимба, и осью вращения лимба и индексом, нанесенным на лимбе. На чертеже представлена пришшпиаль ная схема предлагаемого устройства. Устройство для измерения углов объекта содержит источник 1 излучения; коллиматор 2 с маркой 3; отражательную призму 4, устанавливаемую на контролируемом объекте 5, при этом половина гипотенузной грани призмы 4 перекрыта жестко соединенной с ней телескопической системой 6; компенсатор 7 выполненный также в виДе телескопической системы; датчик 8 угла разворота KOivmeHcaTopa 7, состоящий из лимба 9, установленного с возмсисностью непрерывного вращения вокруг оси, перпендикулярной оптической оси устройства, индекса 1 и узла 11 считывания; датчик 12 исходного положения компенсатора 7 объектив 13, Б фокальной плоскости которого распо ложена диафрагма 14, оптически сопряженная с маркой 3; фотоприемный блок 15 и счетчик 16 импульсов, электрически соединённый с выходами датчика 12 исходного положения, узла 11 считывания и фотоприемного блока 15. Устройство работает следующим, образом. И элучение источника 1, преобразованное коллиматором 2 в пучок паралпел ных лучей, направляется на отражателькую призму 4, установленную на объекте 5, и проходит через открытую псиовину пшотенузной грани отражательной призмы 4. После двукратного отражения от 28334 катетных граней отражательной призмы 4 световой поток попадает на телескопическую систему 6 и отклоняется ею на малый угол Ц , при изменении углового положения объекта 5 относительно на-г чального (нулевого) положения. Угол U примерно в 1/Г-1 раз меньше угла поворота объекта (f , где Г - увеличение телескопической системы. Излучение после телескопической системы 6 попадает на компенсатор 7, представляющий собой телескопическую систему, идентичную телескопической системе 6. При развороте компенсатора 7 вокруг оси, перпендикулярной оптической оси устройства, в плоскости расположения диафрагмы 14 происходит смещение изображения марки 3. Угол разворота компенсатора 7 определяется с помощью датчика 8 угла разворота компенсатора 7, состоящего из лимба 9, жестко связанного с компенсатором 7, и узла 11 считывания, путем подсчета в счетчике 16 числа импульсов, соответствующих числу штрихов лимба, прощедших через центр узла 11 считывания . При этом счетчик 16 запускается импульсом, вырабатываемым датчиком 12 исходного положения компенсатора 7 при прохождении через его центр индекса 10, нанесенного на лимбе 9. Сигнал остановки счета вырабатывается фотоприемным блоком 15 в момент совпадения центра изображения марки 3 с центром диафрагмы 14, т.е., когда оптическая ось компенсатора 7 станет параллельной оптической оси телескопической системы 6. Таким образом, для определения угла ориенташш объекта относительно некототорого направления, принятого за исходное для компенсатсра 7, достаточно умножить число сосчитанных импульсов на цену деления лимба; Разность двух углов ориеигашга объекта 5, определенных таким образом, представляет собой угол разворота объекта. За время разворота компенсатора 7 на ЗбО перед диафрагмой 14 проходит два изображения марки 3. При этом фотоприемный блок 15 вырабатывает два импульса, один из которых, соответствующий общему увеличению телескопической системы компенсатора 6 я компенсатора 7, равному Г , является ложным, так как компенсатор 7 развернут в противоположную сторону по сравнению с разворотом объекта 5. Чтобы исключить срабатывание счетчика 16 от пожного импульса, т.е. что бы обеспечить работу устройства при непрерывном вращении компенсатора 7, датчик 12 исходного положения компеисатора выполнен с возможностью установки его таким образом,что где об - угол между оптической осью устройства и плоскостью,проходящей через Ось вращения лимба 9 и центр датчика 12 ис ходного положения компенсатора 7; - угол между оптической осью компенсатора 7 и плоскостью, проходящей через ось вращения лимба 9 и индекс 1О, нанесенный на лимбе 9; V - максимально возможный угол поворота объекта 5. При этом условии остановка счета импульсов счетчиком 16 происходит по первому, истинному импульсу, соответствующему положению компенсатора 7, при котором общее увеличение двух телескопических cvicTeM равно единице, Ложный импуйьс не может повлиять на работоспособность устройства, так как он, благодаря указанному способу размещения датчика 12 исходного положения компенсатора 7, всегда поступает на счетчик после истинного импульса, который, поступая на вход остановки счета счетчика 16, останавливает счет импульсов. С приходом следующего импульса от датчика 12 исходного полсжения компенсатора 7 измерительный цикл повторяетс Производительность измерений с помощью устройства определяется в основном скоростью вращения компенсатора 7 и инерционностью фотоприемников и электронны элеменггов, поэтому может быть достаточ но высокой. Положительный эффект состо в повьплении производительности за счет автоматизации процесса измерения углового положения контролируемого объекта, а использование в устройстве тепескопических систем с малым увеличением поз воляет сохранить большой диапазон измеряемых углов. Формула изобретения Устройство для измерения углов поворота объекта, содержащее источник излучения и последовательно расположенные по ходу его лучей коллиматор с маркой, отражательную призму, телескопическую систему, жестко связешную с призмой и имеющую увеличение, близкое к единице, компенсатор, выполненный в виде телескопической системы, распсшоженноЦ таким образом, что общее увеличение телескопической системы и компенсатора равно единице, и объектив, о т л и ч а ющ е е с я тем, что, с целью повьпиения производительности измерения, оно снабжено лимбом, жестко соединенным с компенсаторе, установленным с возможностью вращения вокруг оси, перпендикулярной оптической оси устройства, узлом считывания, фотоприемным блоком, оптически сопряженным с маркой, датчиком исходного положения и счетчиком импульсов, входы которого электрически соединены соответственно с выходами датчика исходного положения компенсатора, узла считывания и фотоприемного блока, лимб и узел считывания образуют датчик углового paaaqpOTa компенсатора, а датчик исходного положения компенсатора установлен таким образом, что нормаль к его . центру составляет с плоскостью, образованной счптической осью устройства и осью вращения 1гамба, угол oL , выбираемый из условия , где у - максимально возможный угол поворота объекта; R - угол между плоскостями, образованными оптической осью компенсатора и осью вращения лимба, и осью вращения лимба и индексом, нанесеша 1м на лимбе. Источники информации, принятые во внимание при экспертизе 1.Автсфское свидетельство СССР № 7542ОЗ, кл. Ц 01 В 11/26, 198О. 2.Авторское свидетельство СССР № 853381, кл. q 01 В 11/26, 1981 (прототип).
