(St). УСТРОЙСТВО для ОПРЕДЕЛЕНИЯ УГЛА НАКЛОНА ПОДВИЖНОГО ОБЪЕКТА
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения угла наклона подвижного объекта | 1983 |
|
SU1081414A1 |
| Система управления приводом портала машины термической резки | 1989 |
|
SU1692781A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПИКОВЫХ ЗНАЧЕНИЙ | 2007 |
|
RU2343429C1 |
| НАВИГАЦИОННО-ТОПОГРАФИЧЕСКИЙ ВНУТРИТРУБНЫЙ ИНСПЕКТИРУЮЩИЙ СНАРЯД | 2007 |
|
RU2321828C1 |
| СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЯ УГЛОВЫХ СКОРОСТЕЙ | 1995 |
|
RU2115129C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ДАВЛЕНИЯ | 2001 |
|
RU2200306C2 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2010 |
|
RU2449293C1 |
| Измеритель угла наклона подвижного объекта | 1985 |
|
SU1255858A1 |
| Устройство контроля тока регулятора нагрузки горной машины | 1981 |
|
SU1016504A1 |
| СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВЫХ СКОРОСТЕЙ | 1995 |
|
RU2115128C1 |
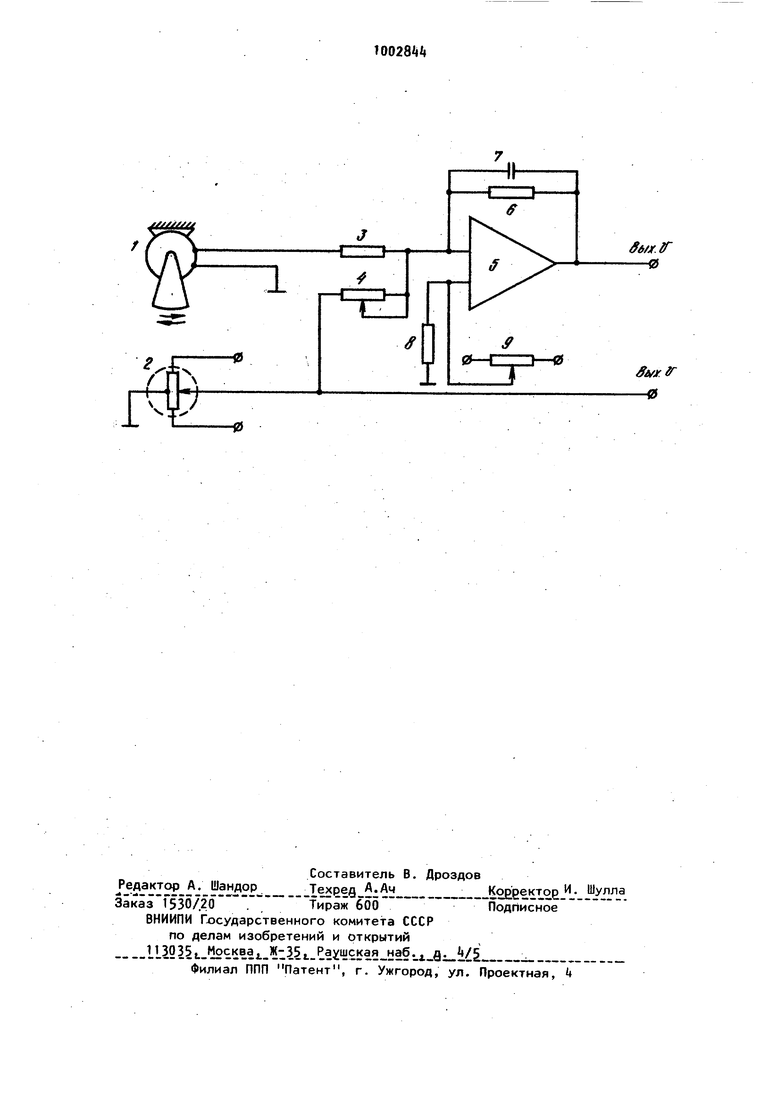
Изобретение относится к контроль но-измерительной технике, в частности, к устройствам для определения углов и угловой скорости наклона, а также стабилизации и управления подвижных объектов, например обитаемых, телеуправляемых, буксируемых, автономных и других подводных аппаратов. Известны устройства для определе ния углов наклона движущихся объектов с помощью физического маятника, гировертикали, а также других устг ройств, используемых свойства текучей среды устанавливаться по линии горизонта С О t lОднако устройства, использующие свойства текучей жидкости, отвесы, а также физические маятники, в зна чительной мере подвержены вредным воздействиям ускорений подвижного объекта. Искусственно вводимое демпфирование подобных устройств с целью уменьшения чувствительности к ускорениям и возможности регулирования периода собственных колебаний приводит к существенному усложнению конструкции и условий эксплуатации, а также к увеличению габаритов и стоимости таких устройств. Кроме того, вводимое демпфирование, уменьшая погрешность от ускорения, само становится источником динамических ошибок измерительного устройства при угловых колебаниях основания относительно равнодействующей силы тяжести. Увеличение периода свободных колебаний физического маятника с целью уменьшения динамической погрешности от воздействий ускорений вызывает увеличение погрешности заслоя маятника. Гидровертикали различной конструкции, использующие свойства быстровращающейся массы сохранять свою ори ентацию в пространстве, из-за несовершенств балансировки и подшипниковых узлов подвержены уходам и поэтому требуют сложных схем коррекции. Поэтому там, где габариты, вес, энер гопотребление и стоимость ограничены, использование гидровертикалей нецелесообразно. Наиболее, близким к изобретению является устройство для определения угла наклона подвижного объекта, содержащее измерительный маятник с грузом - преобразователь Целью изобретения является повыше ние динамической точности, Указанная цель достигается тем, что в устройство, содержащее чувст-i вительный элемент в виде маятника, кинематически соединенного с преобразователем, RC-фильтр и резисторы введены датчик угловой скорости и операционный усилитель, один вход которого через резисторы соединен соответственно с выходами преобразователя и датчика угловых скоростей а выход операционного усилителя через параллельно включенные резистор и конденсатор RC-фильтра соединен с упомянутым входом операционного усилителя, второй вход которого соединен через переменный резистор с источником опорного напряжения, причем ось чувствительности датчика угловой скорости параллельна оси маятника, а постоянная времени RC-фильтра определена в соответствии с формулойKM-к;:; коэффициент усиления датчика угловой скорости; коэффициент усиления преобразователя;отношение сопротивлений резистора на выходе преобразо вателя .и резистора RC-фильт отношение сопротивлений ре зистора на выходе датчика угловой скорости и резистора, в RC-фильтре. На чертеже изображено предлагаемое устройство. Устройство срдержит физический маятник и преобразователь 1, а также датчик 2 угловой скорости, подключен ные через резисторы 3 и 4 соответственно к входу операционного усилителя 5 На этот же вход с выхода устройства поступает через RC-фильтр, составленный из резистора 6 и конденсатора 7, сигнал обратной связи. К второму входу операционного усилителя 5 подключены постоянный резистор 8 и подвижной контакт переменного резистора 9 для балансировки нулевого уровня выходного напряжения устройства. Работа устройства заключается в следующем. При появлении угла крена, либо угла дифферента подвижного объекта (обозначим его буквой V) на выходе преобразователя устройства 1 появляется сигнал постоянного тока, пропорциональный величине этого отклонения - , который через резистор 3 поступает на вход операционного усилителя 5. На выходе датчика 2 угловой скорости также появляется сигнал постоянного тока, но пропорциональный угловой скорости данного отклонения - (символ здесь является операторов дифференцирования по времени ) , который через резистор поступает на тот же вход операционного усилителя 5. Операционный усилитель, представляющий из себя усилитель постоянного тока с большим коэффициентом усиления, при наличии активноемкостной обратной связи с постоянной времени представляет из себя апериодическое звено с передаточной функцией -u;(p) В этом случае изображение выход-ного сигнала устройства можно представлять в следующем виде: адчкмк и к к ри) где К.Д - коэффициент усиления сигнала физического маятн 1ка 1, определяемого соотношением величин резисторов 3 и 6; коэффициент усиления сигнала датчика 2.угловой скорости, определяемого соотношением величин t и 6. Если коэффициенты К„ и Ко выбрать таким образом, чтобы выполнялось соотношение Т . к то изображение полезного выходного сигнала в случае изменения угловой 5 скорости координаты подвижного объе та примет следующий вид v(p) т.е. динамические характеристики ус ройства при изменении угловых координат подвижного объекта не зависят от величины постоянной времени акти ного фильтра. В случае появления динамической помехи в виде линейного ускорения подвижного объекта периодического характера, либо в виде толчков, физический маятник будет совершать ко лебания соответствующей амплитуды и частоты относительно равнодейству щей силы тяжести. Однако датчик 2 угловой скорости не будет реагировать на эти ускорения. 8 этом случа сигнал с физического маятника 1, пройдя.через активный фильтр 5, будет соответсвующим образом ослаблен .Поэтому предварительным выбором вел чины постоянной времени Т активного фильтра можно обеспечить требуемое значение амплитуды динамической оши ки устройства в .заданном диапазоне частот, действующих на объект помех Таким образом, сигнал с датчика угловой ско эости, являющегося форси .рующим звеном, ко.мпенсирует влияние активного фильтра на происхождение полезного сигнала при изменении угловых координат подвижного объекта и в то же время не оказывает влияния на эффективность ослабления фильтром динамических помех, обусловленных линейными ускорениями подвижного объекта. Ввод датчика угловой скорости в схему устройства обеспечивает дополнительной информацией об угловой скорости подвижного объекта и расширяет тем самым функциональные возможности устройства, как в смысле увеличения располагаемой информацией в параметрах движения объекта, так и в смысле расширения области его применения за счёт расширения диапазона частот эффективно ослабляемых динамических помех. 4 Формула изобретения Устройство для определения угла наклона подвижного объекта, содержащее чувствительный элемент в виде маятника, кинематически соединенного с преобразователем, RC-фильтр и резисторы, отличающееся тем , что, с целью повышения динамической точности путем снижения инерционности устройства, в него введены датчик угловой скорости и операционный усилитель, один вход которого через резисторы соединен соответственно с выходами преобразователя и датчика угловых скоростей, а выход операционного усилителя через параллельно включенные резистор и конденсатор RC-фильтра соединен с упомянутым входом операционного усилителя, второй вход которого соединен через переменный резистор о источником опорного напряжения, примем ось чувствительности датчика угловой скорости параллельна оси маятника, а постоянная времени RCфильтра определена в соответствии С формулой -,УК.. мк;: где К (У - коэффициент усиления датчи ка угловой скорости; К - коэффициент усиления преобразователя;К - отношение сопротивлений ре зистора на выходе преобразователя и резистора RCфильтра;Kd отношение сопротивлений резистора на выходе датчика угловой скорости и резистора в RC-фильтре. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР , кл. GOI С 9/08, 07.10.75. 2.Авторско;; свидетельство СССР № , кл. G01 С 9/12, 29.07.70. 3.Авторское свидетельство СССР № 352127, кл. G01 С 9/12, 12.03.71 (прототип).,
±
