Изобретение относится к контрольноизмерительной технике, в частности к устройствам для опреавлш1ия углов и угловой скорости наклсжа, а также стабилизации и управления подвижных объектов, например обитаемых, телеуправляемых, буксируемых, автономных и дру гих подводных аппаратов. По основному авт.св. hfe 1002844 известно устройство для .определения угла наклона подвижного объекта 1, содержащее чувствительный элемент (фис зический мая1яик, кинематически связанный с преобразователем), гироскопический датчик угловой скорости и активный фильтр в виде операционного усилителя, охваченного активно-емкоетаюй обратной связью. Один вход усилителя через масштабные резисторы соединен соответственно с выходами преобразователя и дат чика угловой скорости, а выход операционнсиго усилителя через параллельно вклю R и С соединен с упсв 4янутым входом усилителя, второй вход которого соединен через переменный резистор с источником опорного напряжения. Ось чувствительного гироскопического датчик угловой скорости параллельна оси вращения маятника, а постоянная времени НСфильтра определяется в соответствии с формулой Кд/д М 1 - коэффициент усиления датчика угловой скорости; tc - коэффициент усиления преобра зователя; .. . К-д.. отношение сопротивлений резис тора на выходе преобразовател и резистора RC-фильтра; К л отношение сопротивлений резистора на выходе датчика угловой скорости и резистора 1 С-фильт|Е)а. В известном устройстве амплитудночастотная характеристика (АЧХ) эквивалеитна пропорционального звена в диапазсше частот от О до 2,5 , Это объясняется тем, что въгходная характеристика реальных датчиков угловсй скорости имеет ограниченный диапазон линейности, опрепеляемъШ следующими условиями: О ; , 1 14 где jb - УГОЛ поворота внешней рамки скоростного гироскопа относи- тельно его корпуса; U)- измеряемая угловая скорость корпуса датчика, жестко связанного с подвижным объектом; - угловая скорость дрейфа скорос тного . гироскопа, характеризукяцая несовершенство его конструкции, изготовления, балансировки и механической пружины. В современных датчиках максимальное значение угла /3 ограничено 5-7 градусами, что не позволяет увеличи вать отношение со min при увеличении и; гпох счет уменьшения кривизны выходной характеристики датчика) пропорционально возрастает и Ыд , а следовательно и to, -f. Это расширяет зону нечувствительности датчика сод и накладываетсущественные ограничения на максимально допустимое значение постоянной времени Т активного фильтра, так как динамическая ошибка устройства определяется формулой .. Поэтому в тех случаях, когда диапазон регистрируемых устройством частот превышает упомянутый выше диапазон (О2,5 ), корректирующее влияние датчика угловой скорости становится недостаточным и переменная составляющая полезного сигнала об угловой ориентации подвижного объекта будет измеряться с погрещностями. Целью изобретения является расщир&ние рабочего диапазона путем расширения частотного диапазона пропорциональности выходной характеристики устройства. Указанная цель достигается тем, что в устройство. дополнительно введены решающий усилитель, усилитель обратной связи гироскопического датчика угловой скорости и функциональный преобразователь, вход которого подключен к выходу датчика угловой скорости, соединенного через масштабные резисторы с неинвертирующими входами решающего усилителя и усилителя обратной связи, а первый, второй, третий и т.д. вькоды функционального преобразователя через масштабные резисторы подключены к неинвертирующим входам усилителя обратной связи и решающего усилителя, выход которого черев масштабный резистор и резистор обратной связи подключен к неинвертируюшим входам активного фильтра и решающего усилителя, при этом инвертирующие вхоцы раиакшего усилителя, усилиггеля обратной связи и активного фильрра через переменные резисторы поц-
ключены к источнику напряжения питания, а выход усилителя обратной связи через резистор обоатвой связи и ограничительный резистор подключен к неинвертирую щему вхоцу усилителя и на вход гироскопического датчика угловой скорости.
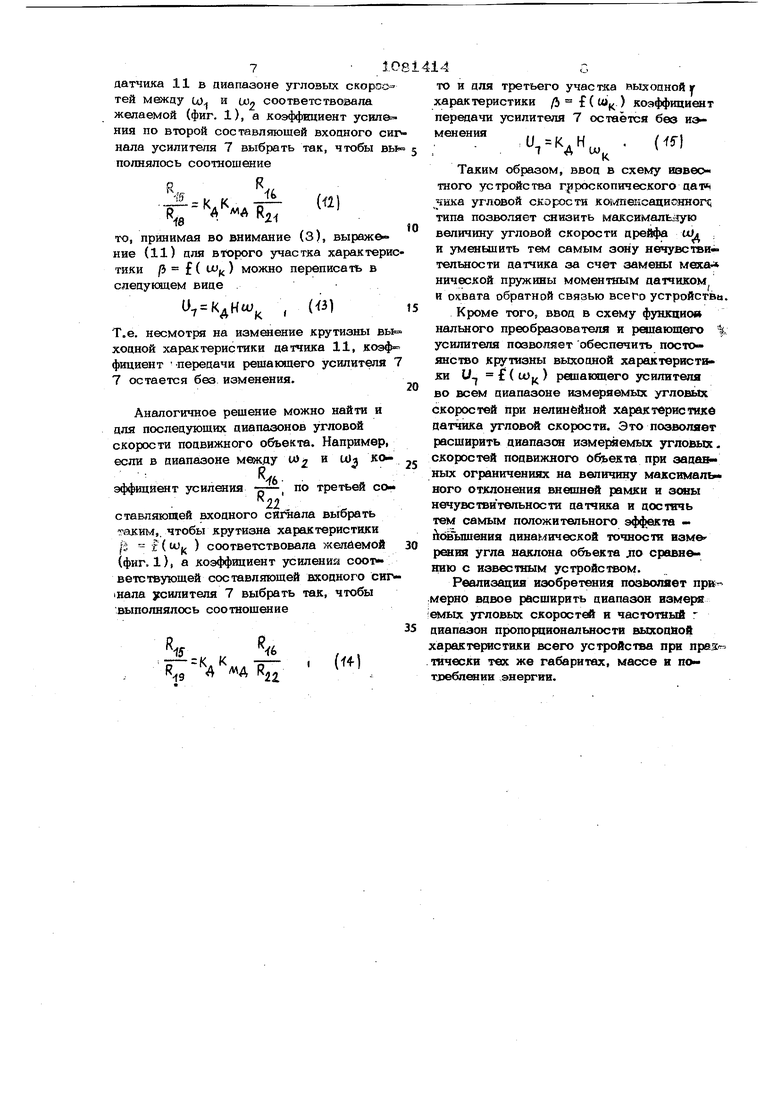
На фиг. 1 и 2 приведены графики характеристик датчиков; на фиг, 3 - схема устройства.
Схема содержит физический маятник и преобразуклдее устройство 1, подключенное через масштабный резистор 2 к неинвертирующему нходу усилителя 3, На этот же вход с выхода усилителя.З через RC-фильтр, составленный из р&- зистора 4 и конденсатора 5, поступает Сигнал обратной связи, а также через переменный резистор б сигнал с выхода рещающего усилителя 7, пропорциональный угловой скорости подвижного объекта v .
Второй вход (инвертирующий) усилителя 3 подключен к резистору 8 и подвижному контакту переменного резистора 9 для балансировки нулевого уровня выходного напряжения всего устройства.Преобразующее устройство 10 гироскопического датчика угловой скорости 11 (например, в виде кругового потенциомет ра с отводом от средней точки) через масштабные резисторы 12 и 13 подключено к неинвертирующим входам решающего усилителя 7 и усилителя 14 обратной связи соответственно. На эти же входы усилителей 7 и 14 через резисторы 15 и 16 обратной связи поступают сигналы обратной связи, соответственно с усилителя 7 и 14. Кроме того, преобразукяцее устройство Ю через функциональный преобразователь 17 и масштабные резисторы 18-2О, а также резисторы 21-23, подключено к неинвертирукщим входам соответственно решающего усилителя 7 йс усилителя 14 обратной связи. Функциональный преобразователь 17 состоит, например, из ряда диодов обратной проводимое ти с возрастающим рядом напржес жения пробоя, включенных в диагонали диодных мостов.
Выход усилителя 14 обратной связи через ограничивающий резистор 24 подключен к моментному датчику 25, развивающему момент, пропорциональный величине выходного сигнала (напряжения)
усилителя 14. Инвертирующие входы решающего усилителя 7 и усилителя 14 обратной связи с целью балансировки их уровней выходного сигнала подключены к к резисторам 26 и 27 и подвижным контактам переменных резис.торов 28 и 29, подключенных к источнику питающ&го напряжения.
Устройство работает следующим обра«зом.
При появлении угла наклона подвижного объекта (обозначим его буквой V ) на въкоде преобразователя 1 появляетсй сигнал постоянного тока (J пропощиональный величине наклона К . Через масштабньй резистор 2 этот сигнал поступает на неинвертирующий вход усилителя 3. На выходе преобразователя Ю гироскопического датчика 11 появляется сигнал посто5шного тока О. , но пропорциональный угловой скорости Й1аклона (символ/ безынерционоператором дифференцирования по времени Р ). Этот сигнал поступает, яепосрецственно на функциональный преобразователь 17 и через резисторы 12 и 13 - на неинвертирующие входы усилителей 14 и 7.
Функциональный преобразователь состоит из ряда полупроводниковъгх диодов обратной прэводимости, причем напряжени пробоя этих диодов образует возрастающи ряд. Поэтому при увеличении (или умень щении) выходного сигнала (напряжения) Уд преобразователя Ю первоначально, когда выходное напряжение преобразователя Ю близко к нулю, диоды всек мооч товых схем заперты и токи через них не проходят (полупроводниковый аиоа считаем идеальнъш, т.е. при С/ / Uf,p его динамическое сопротивление рЕшно нулю, а при и Una - бесконечноопр
ТИЗ
в данном случае выходной сигнал цат чика и , усиленный усилителем 14 о&. ратной связи, через ограничительный р&зистор 24 поступает на вход момеятногб датчика 25, который развивает протвво д ствующий момент относительно оси «ращения внешней рамки гироскопа. Вепвь. чина момента пропорциональна сигналу усилителя 14 обратной связи, а следов тельно и углу отклонения внаин рамки гироскопа 11.
В результате действия гироскопячео кого момента H(j , пропорн ионального угловой скорости объекта (v и противодействующего момента датчика 25,
зкешняа рамка гирослопа 11 повернется
угол
н
(II
/Ь
со.
(-И, где Н - кинематический момент с оросг« ноге гироскопа; К К . К - суммарный коэф ZQ А МА R, , фидиент усиления paaoMjsHyrofi системы из послеаоьатепьно соединшгаых преобразователя Ю, усилителя 14 и момент кого датчика 25. На выхоае ретиающего усилителя 7 также появляется сигнал постоянного тока Uy , пропорциональный угловой LO., ПОДВИЖНОГО объекта скорости к,Ни; Д к При этом, если величину входного реаистора R и величину обратной связи R 5 усилителя 7 выбрать таким образом, чтобы выполнялось соЬтаош&-. то на выходе решающего усилитетш 7 получаем информацию об угловой скоросч ти объекта с коэффициентом передачи . Информация об угловой скорости обй екта ы через масштабный резистор 6 поступает не неинвертируюший вход усилителя 3 (активный фильтр) с передаточ ной функцией К. W{p) . {41 В этом случае изображение выходног сигнала устройства О у можно преде та- вить в следующем виде м где К ., - 5- коэффициент усиления К сигнала преобразователя 2 физического мая-щика Ij р к 4 К - коэффициент усиления сигнала с прёббразователя 10 датчика 11 угловсй скорости. Если коэффициенты jcJJ и К выбра таким образом, чтобы выполнялось соот нсшение
JА А
(6)
М /V( то изображение выходного сигнала об изменении угловой ориентации подвижного объекта пример следующим вид V(P)K K;;;K;V, (71 т.е. динамические характеристики устройства не зависят от величины постоянной времени Т активного фильтра 3 и эквивалентны пропорциональному (безинерционному) звену. При дальнейшем увеличении угловой скорости подвижного объекта u) угол поворота внешней рамки /3 , а следовательно и величина выходного сигнала Ц преобразователя Ю также увеличиваются. И есяи величина выходного сипнала Цд превышает наименьшее из пробивных напряжений U какого-либо из диодов {например, в верхнем мосту) , то через резисторы R g и R потекут вхоц ные токи, пропорциональные разности напряжений Од -Uj., В этом случае на выходе усилителя 14 и преобразова- теля 10 появляются дополнительные сое- тавляющие V4fc K- -lfeВыходной сигнал решаюшего усилителя 7 также состоит из двух составляй R.. «... ,, . 15 ,. .JL(u-i -и„Л . (щ ,,в( Подставляя в последнее выражение соотношение для U , получаем Если коэффициент усиления R / R по второй составлявшей входного сигнала усилителя 14 выбрать таким образом, чтобы крутизна характеристики (J f (w) 7 io датчика 11 в диапазоне угловых скорог тей между со и UD соответствовала желаемой (фиг. 1), а коэффициент усиле ния по второй составляющей входного си нала усилителя 7 выбрать так, чтобы вы полнялось соотношение |х к-А. -- - (Ч. г.. 4 п А ллд R то, принимая во внимание (З), выраж&ние (11) для второго участка характери тики р ( можно переписать в следукнцем виде . . ( Т.е. несмотря на изменение крутизны вы ходной характеристики датчика 11, коэф фициент -передачи решающего усилителя 7 остается без изменения. Аналогичное решение можно найти и для последующих диапазонов угловой скорости подвижного объекта. Например, если в диапазоне между W и u) копо третьей со эффициент усиления ставляющей входного сигнала выбрать такщл,. чтобы крутизна характеристики и - ((Aj-j, ) соответствовала жепйемой (фиг. 1), а коэффвдиент усилений соот ветствующей составляющей входного сиг 1нала усилителя 7 выбрать так, чтобы выполнялось соотношение «22 14о то и для третьего участка выходной г характеристики (u) коэффициент передачи усилителя 7 остаётся без и манен, ,и . (Я Таким образом, ввод в схему иввес тного устройства гигроскопического дат чика угловой скорости ко ете сационногс1 типа позволяет снизить максимальную величину угловой скорости дрейфа оь , и уменьшить тем самым зону негчувстви тельности датчика за счет замены tJiesa нической пружины моментным датчиком и оквата обратной связью всего устройства. Кроме того, ввод в схему функцио нального преобразователя и решающего % усилителя позволяет обеспечить постоянство крутизны выходной характерист ки и ( и)ц ) рвиакшего усилителя во всем диапазоне измеряемых угловьос скоростей при нелинейной характеристике датчика угловой скорости. Это позволяет расширить диапазон измеряемых угловых. скоростей подвижного об&екта при зацавных ограничениях на величину максималького отклонения внешней рамки и зоны нечувствительности датчика и достичь тем самым положительного эффекта 1 6ш ш1ения динамической точности взмо рения угла наклона объекта jno сравн&« нию с известным устройством. Реализация изобретения позволяет прк Мерно вдвое расширить диапазон измер& емых угловък скоростей и частотный диапазон пропортиональноств выхоцйой арактеристики всего устройства при npas« тически тех же габаритах, массе в по TjDe6neHBH энергии.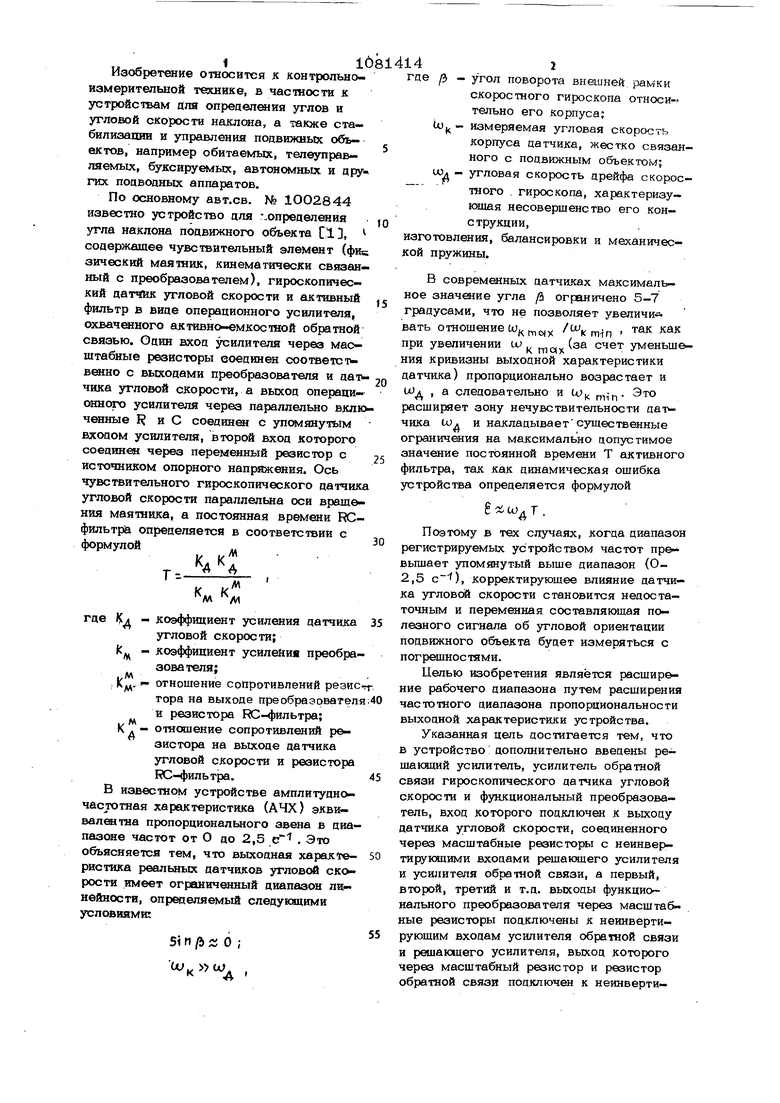


| название | год | авторы | номер документа |
|---|---|---|---|
| БЕЗОБОГРЕВНОЙ ТЕРМОИНВАРИАНТНЫЙ ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПОПЛАВКОВЫЙ ИЗМЕРИТЕЛЬ УГЛОВОЙ СКОРОСТИ | 2013 |
|
RU2548377C1 |
| ИНДИКАТОРНЫЙ ГИРОСТАБИЛИЗАТОР | 1996 |
|
RU2117915C1 |
| СТЕНД ДЛЯ КОНТРОЛЯ ПРЕЦИЗИОННОГО ГИРОСКОПИЧЕСКОГО ДАТЧИКА УГЛОВОЙ СКОРОСТИ | 1992 |
|
RU2044274C1 |
| НАВИГАЦИОННО-ТОПОГРАФИЧЕСКИЙ ВНУТРИТРУБНЫЙ ИНСПЕКТИРУЮЩИЙ СНАРЯД | 2007 |
|
RU2321828C1 |
| ШИРОКОДИАПАЗОННЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВЫХ СКОРОСТЕЙ | 1996 |
|
RU2142643C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ЛИНЕЙНОЙ И УГЛОВОЙ СКОРОСТЕЙ И УГЛОВ ПОВОРОТА ДВИЖУЩЕГОСЯ ОБЪЕКТА | 1994 |
|
RU2097700C1 |
| Магнитогидродинамический датчик угловой скорости с жидким ферромагнитным ротором | 2019 |
|
RU2772568C2 |
| КОМБИНИРОВАННАЯ СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2008 |
|
RU2389041C2 |
| ГИРОИНЕРЦИАЛЬНЫЙ МОДУЛЬ ГИРОСКОПИЧЕСКОГО ИНКЛИНОМЕТРА | 2012 |
|
RU2499224C1 |
| Двухканальный датчик угловой скорости | 2019 |
|
RU2725880C1 |
УСТГОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛА НАКЛОНА ПОДВИЖНОГО ОБЪЕКТА по авт.св. № 1О02844, отличающееся тем, что, с целью расширения рабочего диапазона путем рас ширения частотного диапазона пропорциональности выходной характеристики yciw ройства, в него введены рииаюшнй усилитель, усилитель обратной связи гидроскопического датчика угловой скорости 1-АЧХистройства целом 2 - АЧХ актиЛ( 3-AVi( келавгюя А ство . I VJ и функциональный преобразователь, вход которого подключен к выходу датчика угловой cKopocTHi, соединенного ереэ. масштабные резисторы с неннвертирую щщк входами решающего усилителя в усилителя обратной связи, а первый, втсм рой, третий и т. д. выходы функционала )ного преобразователя через масшта ые резисторы подключены к неинвертируюшим входам усилителя обратной связи и решающего усилителя, выход которого через масштабный резистор и рез1ютор обратной связи подключен к неннверт рукшшм входам активного фильтра и шакяцего усилителя, при этом инвертиру ® юшие входы решающего усилителя, усв лителя обратной связи и активного через переменные резисторы пооклкь. чены к источнику напряжения питания, д выход усилителя обратной связи через резистор обратной связи и ограничвтвш ный резистор подключен к неинвертярукх щему входу усилителя и на вход гидроскопического датчика угловой скорости. ра нюой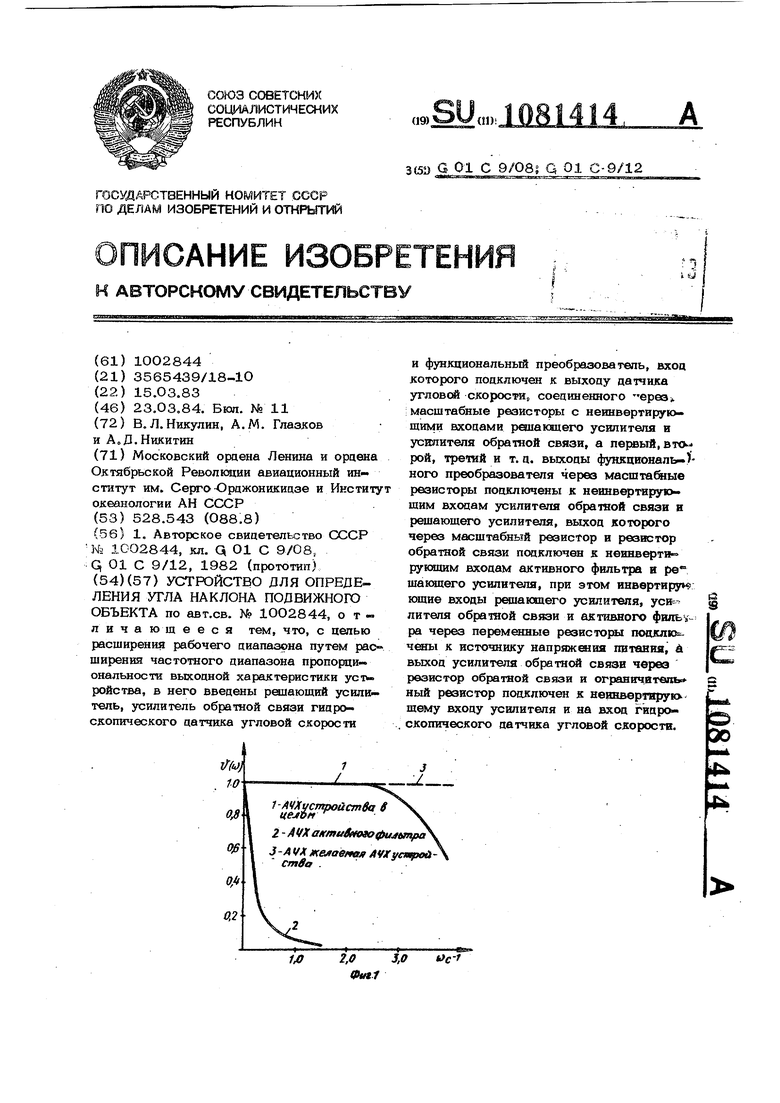
Фы2.2
фи i
-г
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
