При ЭТОМ датчик нагрузки выполне в виде тензометрического элемента или в виде переключателя давления масла внутри цилиндра наклона.
Датчик глубины выполнен в виде концевых переключателей и поворотного дкска, соединенного посредством системы рычагов с цилиндром наклона, причем на поворотном диске установлены кулачки с возможностью взаимодействия с концевыми переключателями.
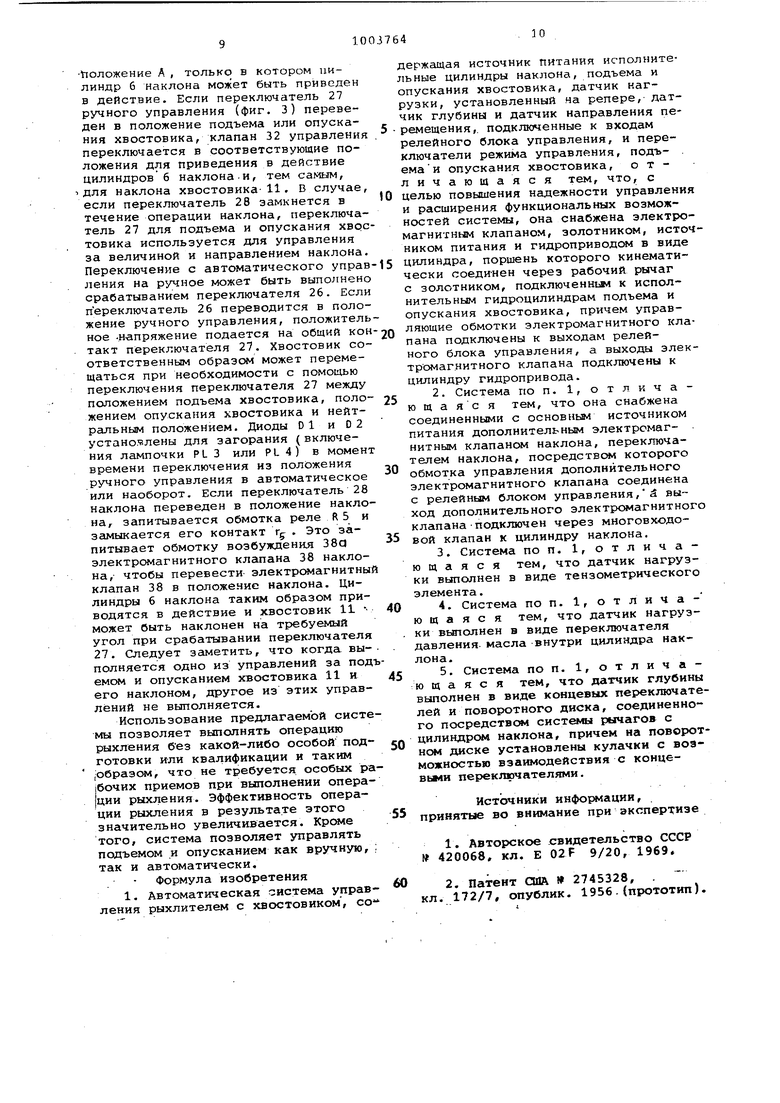
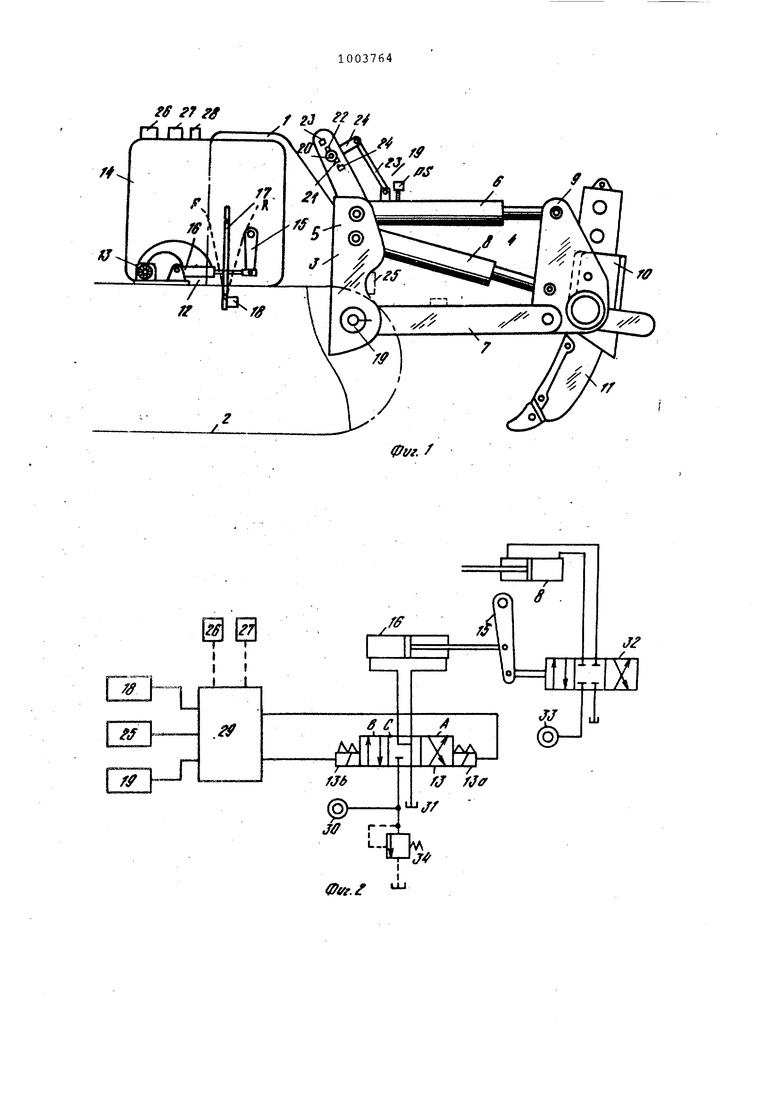
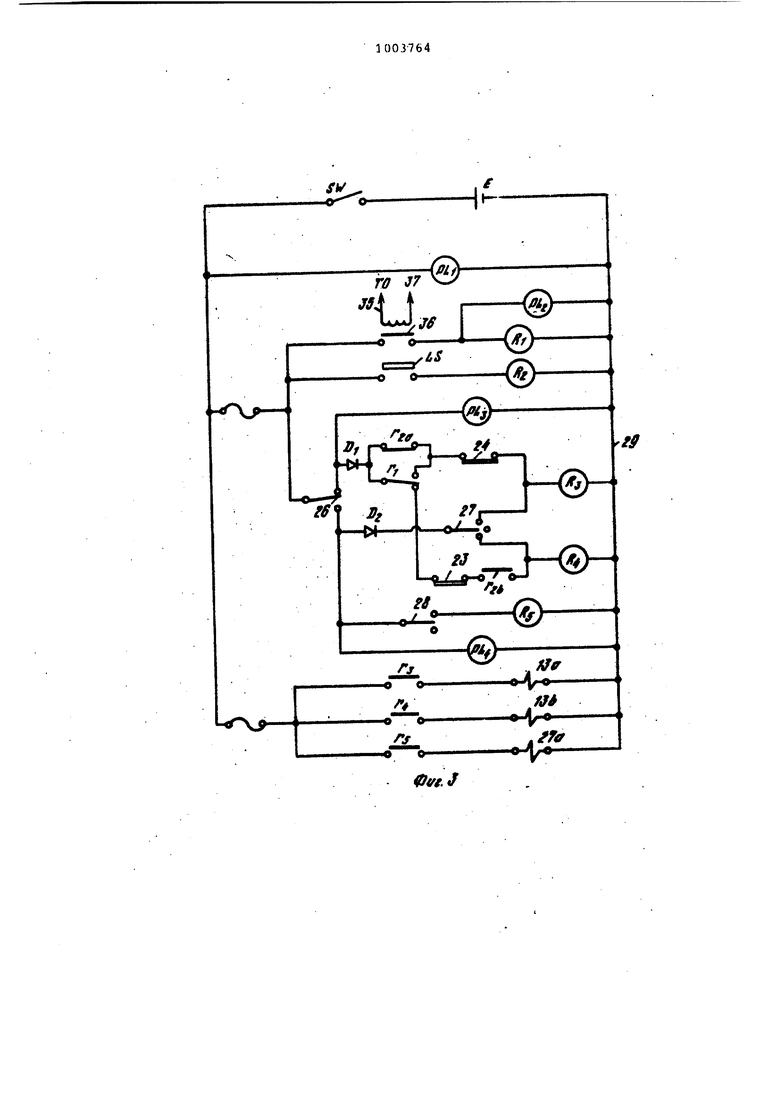
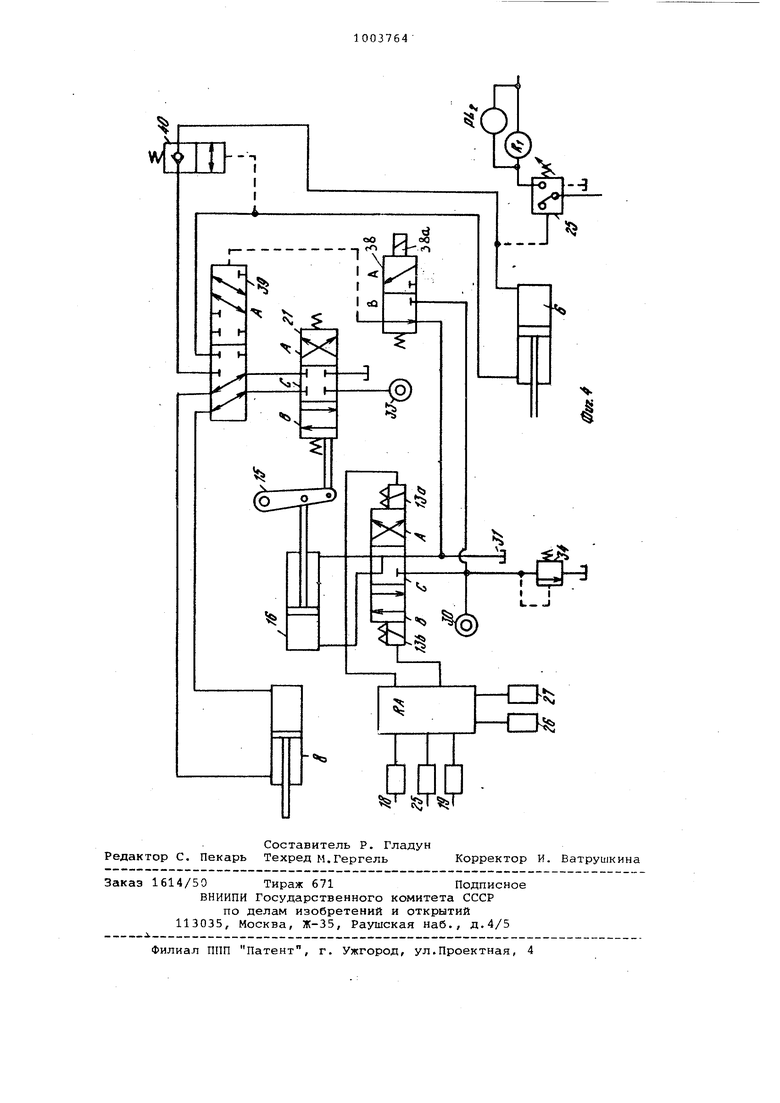
На фиг. 1 изображен рЕлхлитель, установленный на тракторе, и его рабочий узел,(вид сбоку} на фиг. 2 функциональная схема основного вари анта системы/ на фиг, 3 - принципиальная электрическая схема блока управления; на фиг. 4 - функциональная схема второго варианта системы с управляемым наклоном.
. Система управления Е ыхлителем выполнена .следующим образом.
На фиг. 1 показан трактор, имеющий корпус 1 и перемещающийся с помощью гусениц 2. Пара установочных кронштейно1в 3 жестко закреплена на задней части корпуса 1. Рыхлитель 4 съемно установлен на установочных кронштейнах 5 и включает в себя пару цилиндров б наклони, пару звеньев 7, которые простираются параллельно цилиндрам наклона, пару подъемных цилиндров 8, установленных диагонально между цилиндрами наклона и звеньями 7, пару балочных кронштейнов 9, которые шарнирно соединены у верхней части с концами цилиндров б наклона, удаленными от установочных кронштейнов, и у нижней части - с концевым участком звеньев 7 и .подъемных цилиндров 8, удаленный от установочных кронштейнов, держатель 10, хвоствика 11, установленный между и прикрепленный к паре балочных кронштейнов 9, хвостовик 11 съемно установлен в пазу, образованном в держателе 10 хвостовика и имеющим точку или конец у самого нижнего его учаска.
Рабочий блок 12 включает в себя электромагнитный клапан 13, управляемый электрическим сигналом, масляный резервуар 14, рабочий орган 15, гидравлический, привод 16, ра ботающий на текучей среде под давлением, поданным от электромагнитного клапана 13. Рабочий рычаг 15 приводится в действие штоком гидравлического привода 16. У нижней части рычага 17 изменения скорости установлен датчик 18 направления перемещения вперед и реверс, который замыкается и размыкается в соответствии с позицией вперед и позицией реверс рычага 17 изменения скороети. Датчик 19 глубины установлен дл определения глубины проникновения хвостовика 11 репера по углу поворота цилиндра наклона,. Датчик 19 глубины включает в себя крошитейн, установленный у концевого участка ближе к установочному кронштейну 3 одного из цилиндров 6 наклона, диск 20, поворотно установленный на кронштейне, который жестко прикреплен к установочному кронштейну 3, кулачок 21 верхнего предела и кулачок 22 нижнего предела, прикрепленный к диску 20, концевые переключатели 23 и 24, прикрепленные к кронштейну и зацепляемые с кулачками ,21 и 22 соответственно, рычаги 23 и 24, установленные между кронштейном и диском 20 для механической передачи поворотного движения цилиндра 6 наклона к диску 20, для поворота диска 20. Датчик 19 глубины установлен для определения механически и электрически предварительно заданного верхнего предела и предварительно заданной глубины проникновения хвостовика 11. Установочные позиции кулачков 21 и 22 являются регулируемыми.
Кроме этого, датчик 19 глубины можно выполнить так, что поворот шарнира звеньев 7 может быть определен концевым переключателем.
Датчик 25 нагрузки установлен для определения нагрузки, прерывающей заранее заданное значение, т.е. избыточной нагрузки, приложенной к хвостовику 11. В качестве детектора 25 нагрузки можно с успехом использовать тензометр или прибор, который электрически определяе напряжение, полученное от избыточной нагрузки, или переключатель давления, который переключается от одного положения к другому, когда давление в цилиндрах 6 наклона превышает заранее заданное значение. В случае использования тензометра пледний может быть установлен на соответствующем месте, удобном для определения напряжения, например на кривом участке установочного кронштейна 3 или на концевом участке цилиндра 6 наклона или звена 7 ближе к установочному кронштейну 3. В случае исиользования переключателя давления, его предпочтительно устан вить на концевом участке одного из цилиндров 6 наклона, ближайшем к установочному кронштейну 3, так, чтоб текучая среда под давлением могла быть введена в переключатель давления через отверстие, образованное в концевом участке цилиндра б наклона. Наверху масляного резервуара 14 установлен переключатель 26 выбора режима ручного или автоматического управления .для выбора автоматической или ручной работы рыхлителя 4, переключатель 27 для подъема или опускания хвостовика 11 при ручном управлении и переключател 28 для ручного управления за наклоном хвостовика 11.
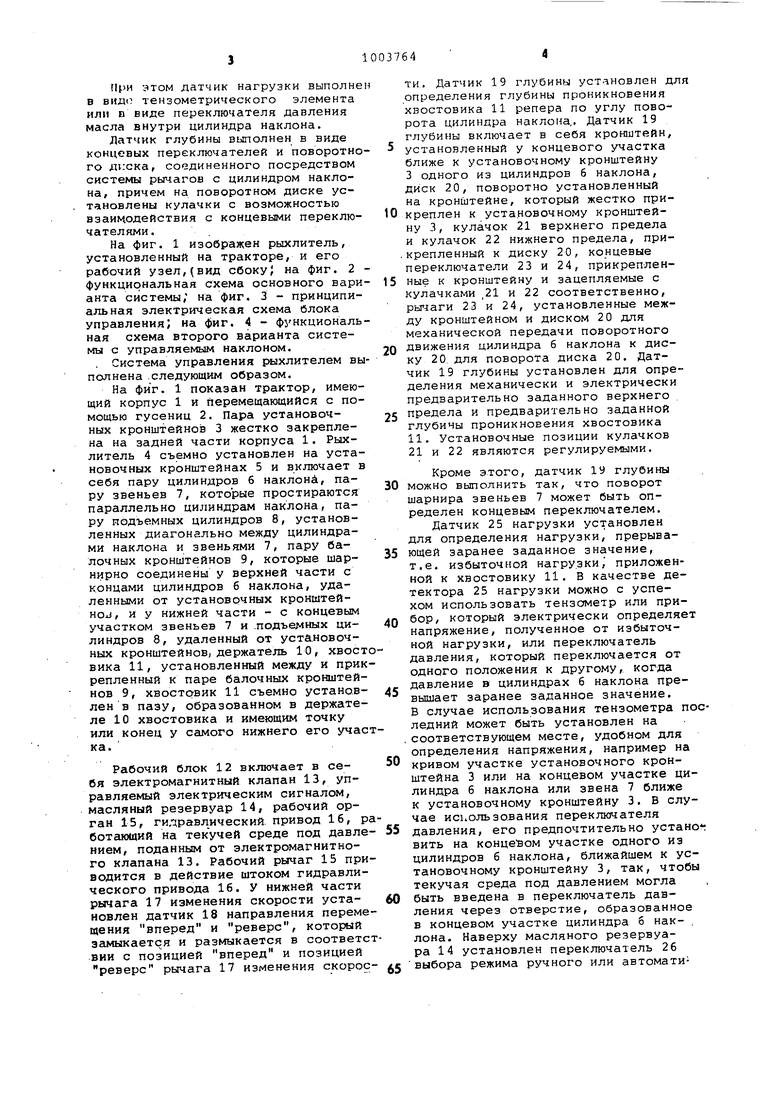
На фиг.2 схематически приведена электрическая схема, используемая в системе управления. Выходной сигнал от датчика 18 направления перемещения позиции вперед и реверс подается в релейный блок 29 управления. Сигнал перемещения вперед от датчика 18 дает возможность блоку управления осуществлять автоматическое управления за рыхлителем только при движении трактора . вперед. Выходной сигнал датчика 25 нагрузки, который представляет воздействие избыточной нагрузки на хвостовик 11 репера, подается в блок 29. управления и, тем самым, позволяет блоку управления поднять хвостовик 11 только в случае, когда
избыточная нагрузка приложена к
трактору, перемещаюшемуся вперед.
Детектор 19 глубины подает в блок 29 управления сигнал, представляющий верхнее предельное положение хвоетовика 11,и сигнал, представляющий оптимальную глубину хвостовика 11. Если первый сигнал подается при автоматическом перемещении вперед,
;блок управления останавливает подъем хвостовика 11. Если последний сигнал подается, блок управления . останавливает опускание хвостовика и поддерживает его на оптимальной глубине проникновения до тех пор, пока не будет приложена избыточная нагрузка к хвостовику и трактор не будет двигаться вперед.
Электромагнитный клапан 13 приводится в действие сигналом управления, поданным от блока управления Клапан смещается в позицию А подъема xвocтoвиka, когда его обмотка возбуждения 13 запитывается,и в позицию В опускания хвостовика, когда его обмотка возбуждения 13- запитывается, и возвргицается в нейтральное положение С, когда обе обмотки обесточены. Направление текучей среды под давлением из источника 30 питания изменяется, когда клапан переходит из одного положения в другое, и тем самью вызывает выход и втягивание гидравлического привода 16. В нейтральном положении С подача текучей среды из источника 30 питания к приводу 16 прерывается и любой из каналов привода 16 сообщается с дренажом 31. Наиболее удаленный концевой участок штока привода 16 шарнирно соединен со средним участком рабочего рычага 15, который перемещается поворотно, когда шток приво да 16 удлиняется и убирается. Поворотное движение рабочего рычага 15 приводит в действие клапан 32 привода рыхлителя репера, тем самым заставляя текучую среду под давлением от источника 33 питания среды входить в цилиндры 8 подъема через клапан 32 привода репера для приведения в действие цилиндров 8. Разгрузочный клапан 34 установлен для снижения давления текучей среды посредством отвода текучей среды, когда давление превышает заранее заданное значение.
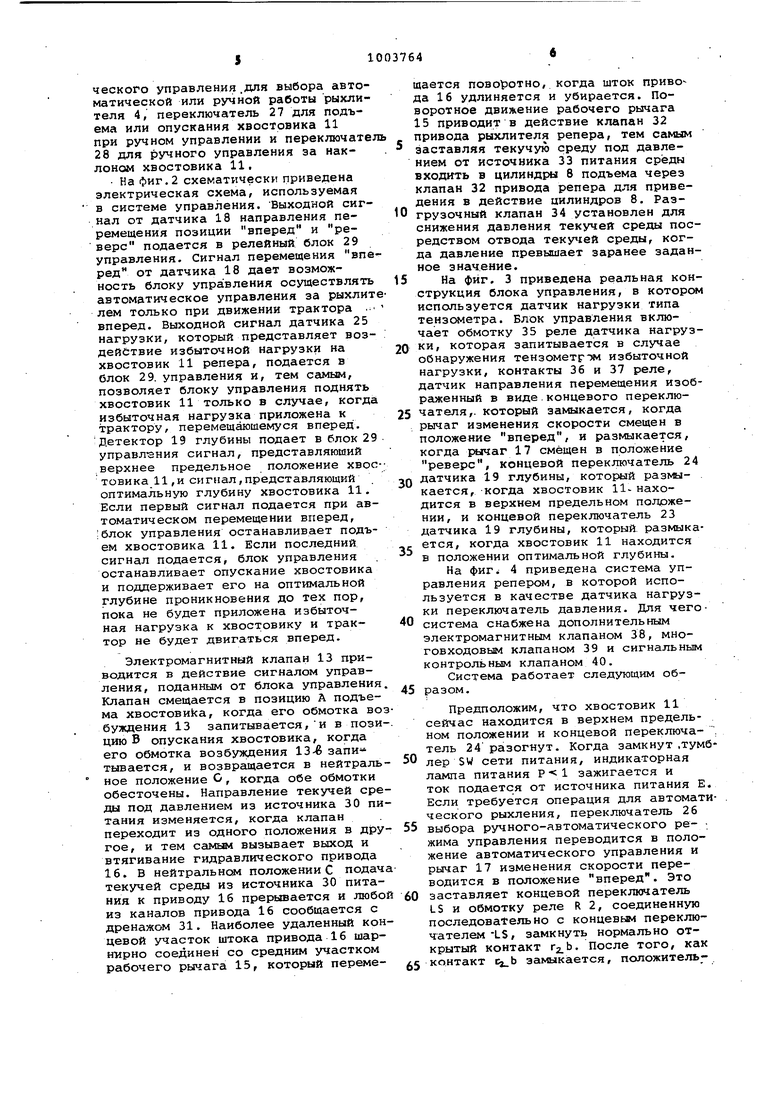
На фиг. 3 приведена реальная конструкция блока управления, в которо используется датчик нагрузки типа тензометра. Блок управления включает обмотку 35 реле датчика нагрузки, которая запитывается в случае обнаружения тензометртм избыточной нагрузки, контакты 36 и 37 реле, датчик направления перемещения изображенный в виде.концевого переключателя,, который замыкается, когда рычаг изменения скорости смещен в положение вперед, и размыкается, когда рычаг 17 смещен в положение реверс, концевой переключатель 24 датчика 19 глубины, который размыкается, когда хвостовик 11-находится в верхнем предельном полржении, и концевой переключатель 23 датчика 19 глубины, который размыкается, когда хвостовик 11 находится в положении оптимальной глубины.
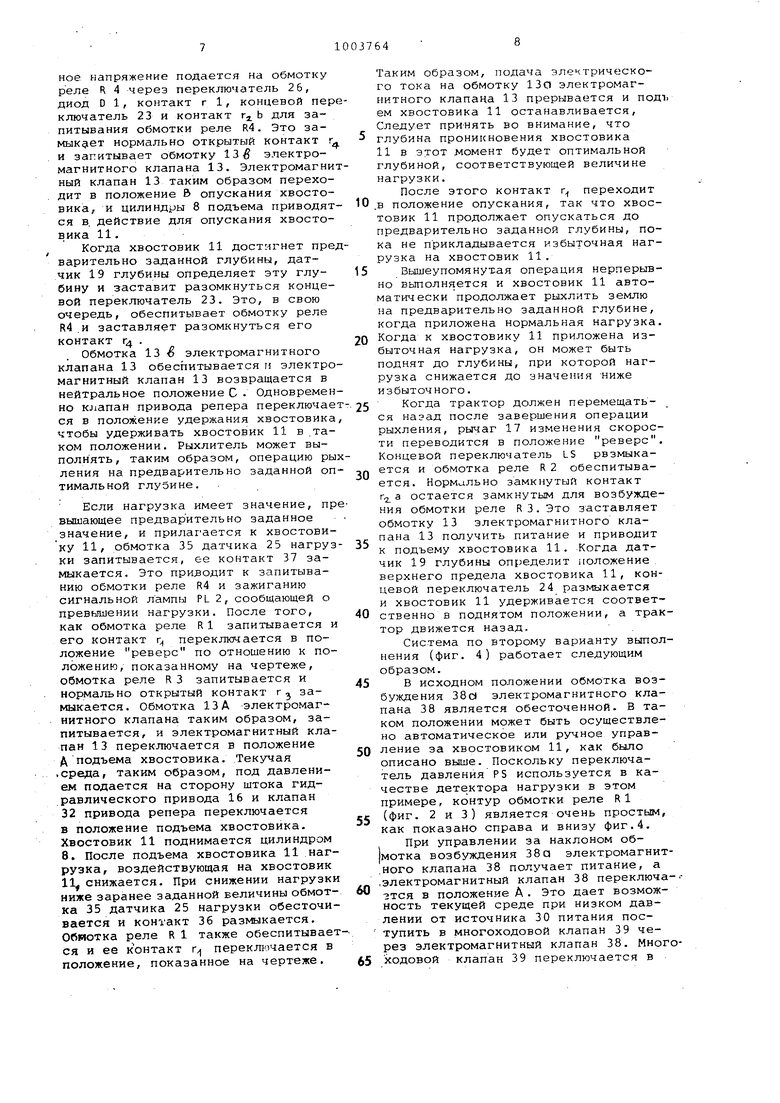
На фиг 4 приведена система управления реперс 1, в которой используется в качестве датчика нагрузки переключатель давления. Для чегосистема снабжена дополнительным электромагнитным клапаном 38, многовходовым клапаном 39 и сигнальным контрольным клапаном 40.
Система работает следующим образом.
Предположим, что хвостовик 11 сейчас находится в верхнем предельном положении и концевой переключатель 24 разогнут. Когда замкнут .тумлер SW сети питания, индикаторная лаилпа питания Р 1 зажигается и ток подается от источника питания Е Если требуется операция для автоматческого рыхления, переключатель 26 выбора ручного-автоматического режима управления переводится в положение автоматического управления и рычаг 17 изменения скорости переводится в положение вперед. Это заставляет концевой переключатель LS и обмотку реле R 2, соединенную последовательно с концевьм переключателем LS, замкнуть нормально открытый контакт . После того, как контакт замыкается, положительное напряжение подается на обмотку реле R 4 через переключатель 26, диод О 1, контакт г 1, концевой пе ключатель 23 и контакт г Ь для запитывания обмотки реле R4, Это замыкч1ет нормально открытый контакт и запитывает обмотку 13 и электромагнитного клапана 13. Электромагн ный клапан 13 таким образом перехо дит в положение В опускания хвосто вика, и цилиндры 8 подъема приводя ся в. действие для опускания хвосто вика 11, Когда хвостовик 11 достигнет пр варительно заданной глубины, датчик 19 глубины определяет эту глубину и заставит разомкнуться конце вой переключатель 23. Это, в свою очередь, обеспитывает обмотку реле R4,и заставляет разомкнуться его контакт Г4 . Обмотка 13 электромагнитного клапана 13 обеспитываетсяи электро магнитный клапан 13 возвращается в нейтральное положение С. Одновреме но клапан привода репера переключа ся в положение удержания хвостовика чтобы удерживать хвостовик 11 в .таком положении. Рыхлитель может выполнять, таким образом, операцию ры ления на предварительно заданной оп тимальной глубине. Если нагрузка имеет значение, пр вышающее предварительно заданное значение, и прилагается к хвостовику 11, обмотка 35 датчика 25 нагру ки запитывается, ее контакт 37 замыкается. Это приводит к запитыванию обмотки реле R4 и зажиганию сигнальной лампы PL 2, сообщающей о превышении нагрузки. После того, как обмотка реле R 1 запитывается и его контакт г переключается в положение реверс по отношению к положению, показанному на чертеже, обмотка реле R 3 запитывается и Нормально открытый контакт г замыкается. Обмотка 13 А электромагнитного клапана таким образом, запитывается, и электромагнитный клапан 13 переключается в положение Д подъема хвостовика. Текучая .среда, таким образом, под давлением подается на сторону штока гидравлического привода 16 и клапан 32 привода репера переключается в положение подъема хвостовика. Хвостовик 11 поднимается цилиндр-ом 8, После подъема хвостовика 11 нагрузка, воздействующая на хвостовик 11 снижается. При снижении нагрузки ниже заранее заданной величины обмотка 35 датчика 25 нагрузки обесточивается и контакт 36 размыкается. Обиотка реле R 1 также обеспитывает ся и ее контакт г переключается в положение, показанное на чертеже. Таким образом, подача электрического тока на обмотку 13а электромагнитного клапана 13 прерывается и под1) ем хвостовика 11 останавливается. Следует при-нять во внимание, что глубина проникновения хвостовика 11 в этот момент будет оптимальной глубиной, соответствующей величине нагрузки. После этого контакт г переходит .в положение опускания, так что хвостовик 11 продолжает опускаться до предварительно заданной глубины, пока не прикладывается избыточная нагрузка на хвостовик 11. Вышеупомянутая операция нерперывно выполняется и хвостовик 11 автоматически продолжает рыхлить землю на предварительно заданной глубине, когда приложена нормальная нагрузка. Когда к хвостовику 11 приложена избыточная нагрузка, он может быть поднят до глубины, при которой нагрузка снижается до значения -ниже избыточного. Когда трактор должен перемещаться назад после завершения операции рыхления, рычаг 17 изменения скорости переводится в положение реверс. Концевой переключатель LS рвзмыкается и обмотка реле R 2 обеспитывается. Нормально замкнутый контакт г, а остается замкнутым для возбуждения обмотки реле R3. Это заставляет обмотку 13 электромагнитного клапана 13 получить питание и приводит к подъему хвостовика 11. Когда датчик 19 глубины определит 1 оложение , верхнего предела хвостовика 11, концевой переключатель 24 размыкается и хвостовик 11 удерживается соответственно в поднятом положении, а трактор движется назад. Система по второму варианту вьополнения (фиг. 4) работает следующим образом. В исходном положении обмотка возбуждения 38с( электромагнитного клапана 38 является обесточенной. В таком положении может быть осуществлено автоматическое или ручное управление за хвостовиком 11, как было описано выше. Поскольку переключатель давления Р5 используется в качестве детектора нагрузки в этом примере, контур обмотки реле R1 (фиг. 2 и 3) является очень простым, как показано справа и внизу фиг.4. При управлении за наклоном обмотка возбуждения 38 а электромагнитного клапана 38 получает питание, а электромагнитный клапан 38 переключа- зтся в положение А. Это дает возможность текущей среде при низком давлении от источника 30 питания поступить в многоходовой клапан 39 через электромагнитный клапан 38. Многоходовой клапан 39 переключается в 11оложение А , только в котором пилиндр б наклона может быть приведен в действие. Если переключатель 27 ручного управления (фиг. 3) переведен в положение подъема или опускания хвостовика, клапан 32 управления переключается в соответствующие положения для приведения в действие цилиндров 6 наклона-И, тем самым, 1 для наклона хвостовика-11. В случае если переключатель 28 замкнется в течение операции наклона, переключатель 27 для подъема и опускания хвое товика используется для управления за величиной и направлением наклона Переключение с автоматического управ ления на ручное может быть выполнено срабатыванием переключателя 26. Если переключатель 26 переводится в положение ручного управления, положитель ное -напряжение подается на общий кон такт переключателя 27. Хвостовик соответственным образом может перемещаться при необходимости с помощью переключения переключателя 27 между положением подъема хвостовика, положением опускания хвостовика и нейтрешьным положением. Диоды 01 и D 2 установлены для загорания (включения лампочки PL 3 или PL 4) в момент времени переключения из положения ручного управления в автоматическое или наоборот. Если переключатель 28 Наклона переведен в положение наклона, запитывается обмотка реле R5 и Зс1мыкается его контакт г , Это запитывает обмотку возбуждения 38а электромагнитного клапана 38 наклона, чтобы перевести электрс 1агнитный клапан 38 в положение наклона. Цилиндры 6 наклона таким образом приводятся в действие и хвостовик 11 может быть наклонен на требуемый угол при срабатывании переключателя 27. Следует заметить, что когда выполняется одно из управлений за подъ емом и опусканием хвостовика 11 и его наклоном, другое из этих управлений не выполняется. Использование предлагаемой системы позволяет выполнять операцию рыхления без какой-либо особой подготовки и-ли квалификации и таким (Образом, что не требуется особых рабочих приемов при выполнении операции рыхления. Эффективность операции рыхления в результате этого значительно увеличивается. Кроме того, система позволяет управлять подъемом и опусканием как вручную, ; так и автоматически. Формула изобретения 1. Автоматическая система управления рыхлителем с хвостовиком, со держащая источник питания исполнитеьные цилиндры наклона, подъема и опускания хвостовика, датчик нагрузки, установленный на репере, датчик глубины и датчик направления перемещения,, подключенные к входам релейного блока управления, и переключатели режима управления, подъ- . емаи опускания хвостовика, отличающаяся тем, что, с целью повышения надежности управления и расширения функциональных возможностей системы, она снабжена электромагнитным клапаном, золотником, источником питания и гидроприводом в виде цилиндра, поршень которого кинематически соединен через рабочий рычаг с золотником, подключенньм к исполнительным гидроцилиндрам подъема и опускания хвостовика, причем управляющие обмотки электромагнитного клапана подключены к выходам релейного блока управления, а выходы электромагнитного клапана подключены к цилиндру гидропривода. 2.Система по п. 1, отличающаяся тем, что она снабжена соединенными с основньм источником питания дополнительным электромагнитным клапаном наклона, переключателем наклона, посредством которого обмотка управления дополнительного электромагнитного клапана соединена с релейным блоком управления,и выход дополнительного электромагнитного клапана-подключен через многовходовой клапан к цилиндру наклона. 3.Система по п. 1, отличающаяся тем, что датчик нагрузки выполнен в виде тензометрического элемента. 4.Система по п. 1, о т л и ч а ю щ а я с я тем, что датчик нагрузки вьиюлнен в виде переключателя давления масла внутри цилиндра наклона. 5.Система по п. 1, отлич аю щ а я с я тем, что датчик глубины выполнен в виде концевых переключателей и поворотного диска, соединенного посредством систекы рычагов с цилиндром наклона, причем на поворотном диске установлены кулачки с возможностью взаимодействия с концевьми пе{ еключател51ми. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 420068, кл. Е 02F 9/20, 1969. 2. Патент США 2745328, кл. 172/7, опублик. 1956.(прототип). fS г г/ / zJ
ф1/г. / f/ //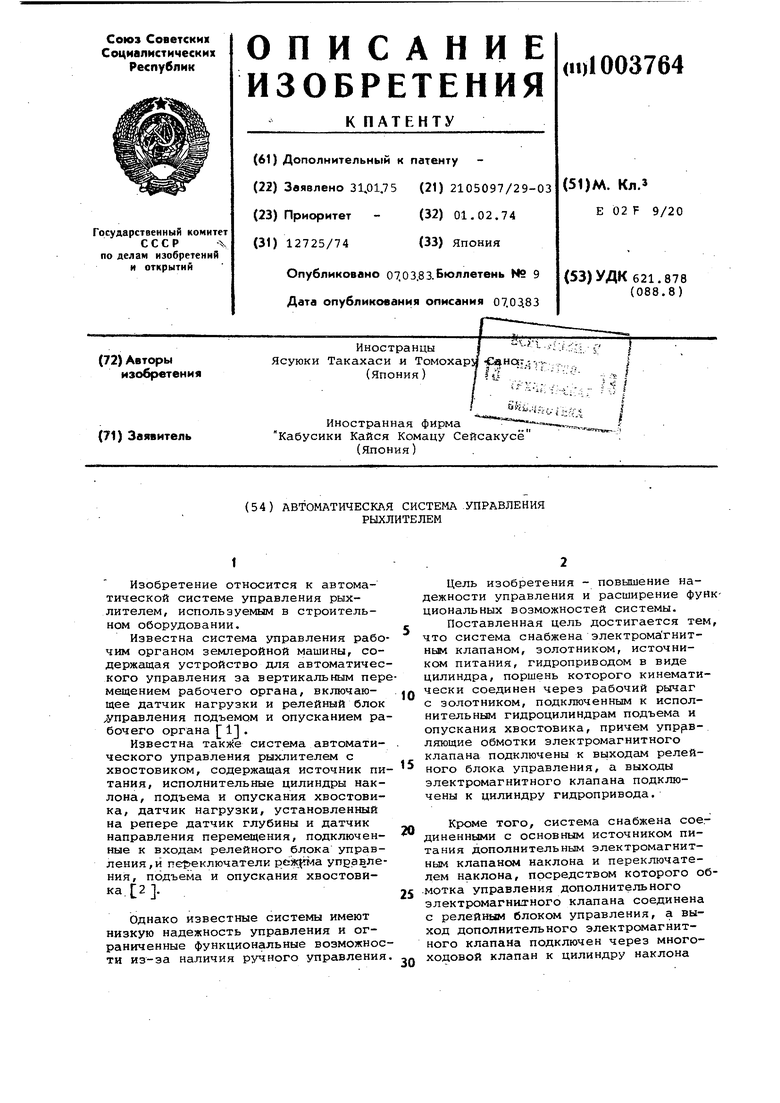
| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматического управления рабочим органом рыхлителя | 1976 |
|
SU858575A3 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ГЛУБИНОЙ ОБРАБОТКИ ПОЧВЫ ФРОНТАЛЬНЫМ РОТАЦИОННЫМ ВНУТРИПОЧВЕННЫМ РЫХЛИТЕЛЕМ | 2009 |
|
RU2418399C2 |
| Система управления опрокидыванием самосвального транспортного средства | 1984 |
|
SU1447272A3 |
| Шагающий болотный тягач | 2022 |
|
RU2779001C1 |
| МОТОЦИКЛ С ВЫДВИЖНОЙ УСТАНОВКОЙ СО СНАБЖЕННЫМИ ЛЕЗВИЯМИ ЛЫЖАМИ | 2016 |
|
RU2666062C1 |
| МОТОЦИКЛ С АВТОМАТИЧЕСКИМ ОПОРНЫМ КОЛЕСНЫМ УСТРОЙСТВОМ | 2016 |
|
RU2666063C1 |
| Устройство для дистанционного управления электрокаром | 1975 |
|
SU743573A3 |
| Система автоматического управления рабочим органом транспортной машины | 1977 |
|
SU940651A3 |
| Гидропривод затвора гидротехнического сооружения | 1989 |
|
SU1684409A1 |
| Способ выправки железнодорожного пути и машина для его реализации | 1974 |
|
SU865137A3 |
0Vf.l
S
IS
/7r1
.«I
0fff.
