Изобретение относится к системе автоматического управления землеройных и планировочных машин, в частности рабочим органом рыхлителя. Известно устройство автоматичес кой стабилизации положения рабочего органа, обеспечивающее включение и выключение золотникового гидравличес кого привода рабочего органа и содер жащее релейную схему управления, в которой управление золотниковым гидравлическим приводом рабочего органа осуществляют по углу поперечного наклона этого органа, сравнения с заданной величиной угла наклона fl. Известно также устройство управле ния строительно-дорожных машин, клю чающее систему управления рабочим органом -:: концевыми выключaтeля ш нижнего и верхнего положения рабочего органа 2 J. Известно также устройство управления рабочим органом планировочной машины, содержащие рабочие цилиндры подъема и опускания рабочего органа, датчик верхнего и нижнего положе ния, датчик режима работы, электромагнитный привод, перепускной клапан, датчик давления, гидросистему управления и электрическую цепь и служащее для автоматического регулирования заглубления и установки рабочего органа под заданным углом 3j. Однако операция проходки при помощи известных устройств осуществляется вручную при помощи оператора, который перемещает сошник рыхлителя в вертикальном направлении и регулирует УГОЛ сошника в соответствии со своим опытом и сочетанием таких факторов, как состояние почвы, скорость перемещения и др. условия работы. Соответственно требуется,чтобы оператор имел высокую квалификацию и опыт работы. Дополнительно для того, чтобы вручную регулировать сошник рыхлителя, оператор должен постоянно наблюдать за процессом работы. Это не только увели 1ивает усталойть (утомляемость) оператора, но также снижает эффективность работы. Наиболее близким техническим решением является система автоматического управления рабочим органом рыхлителя, содержащая рабочие цилиндры подъема и наклона рыхлителя, связанные с электромагнитным приводом подъема и наклона рыхлителя через перепускной клапан, источник Питания, датчики верхнего и нижнего положения
рабочего органа, датчик нагрузки на рыхлитель, датчики установки угла рыхлителя при проходке и рытье, переключатели режима работы и вида управления, причем датчики установки угла рыхлителя при проходке и рытье соединены посредством электрической цепи с обмотками электромагнитного привода подъема и наклона рыхлите-ля Г4 1. 1. -J,
Недостатком иэвестной системы является ниэкая надежность управления и невысокая производительность.
Цель изобретения - повышение надежности и расширения функциональных возможностей системы.
Поставленная цель достигается тем, что она снабжена переключающей схемой ручного управления рыхлителя и реле безопасности, причем переключающая схема ручного управления рыхлителя подключена через датчики верхнего и нижнего положения к обмоткам электромагнитного привода, а реле безопасности включено между переключателем режима работы и источнико питания.
Кроме того, система снабжена механически связанными между собой .управляющим цилиндром и клапаном рыхлителя, причем управляющий гидроцилиндр соединен гидравлически с электромагнитным приводом подъема и наклонзГ рыхлителя, а управляющий клапан с перепускным клапаном.
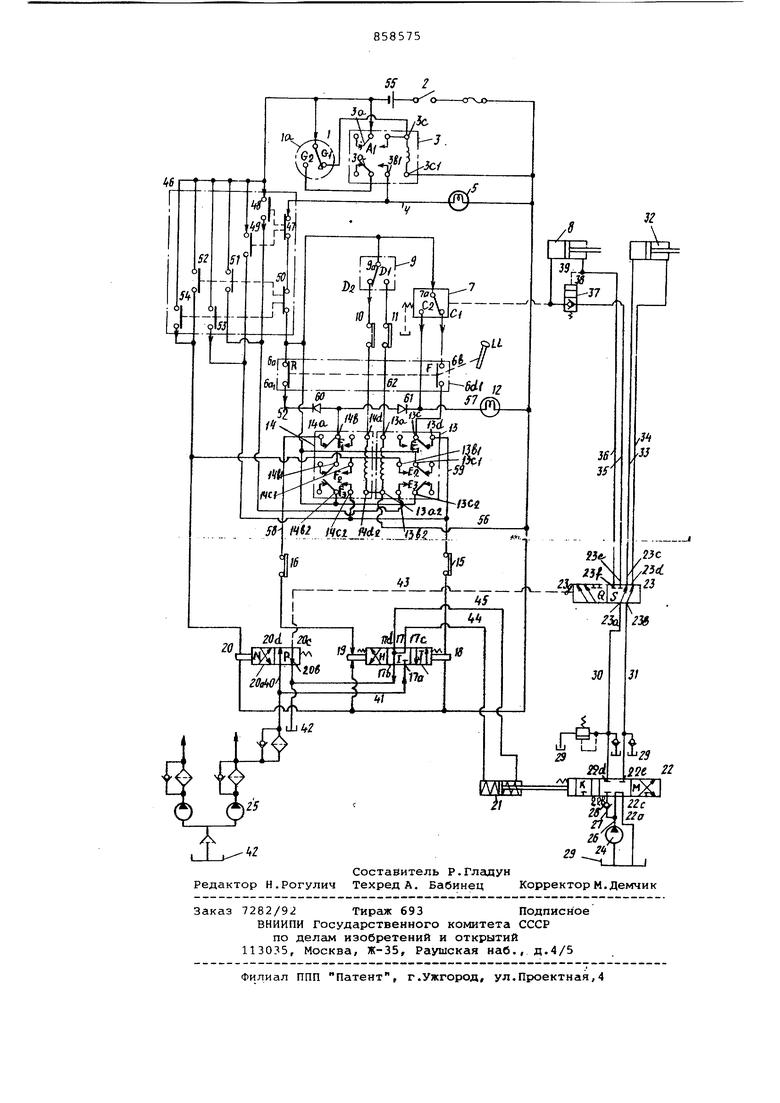
На чертеже показана принципиальная схема системы автоматического управления р лителя.
Система включает переключатель 1с ручного на автоматическое управлени который подключают к контакту С для автоматического управления и к заземленному контакту С для ручного управления. Перевод переключателя в положение для автоматического управления выполняется после того, как замкнут выключатель 2 питания. Однако, с целью предотвращения неправильной операции из-за замыкания выключателя 2 питания, после перевода переключателя 1 в положение для автоматического управления, предусматривается реле 3 безопасности. Когда выключатель 2 питания замыкается, в то время как переключатель 1 замкнут с контактом С, катушка реле 3 возбуждается и подвижные контакты Зд и Зд. перемещаются в сторону, противоположн ) показанной, и реле самоудерживается при помощи контактов ЗрИ А, С того момента, когда переключатель 1 переводится в положение для автоматического управления С, цепь за 1ыкается с проводником 4 через контакт С и контакты Сз при этом загорается сигнальная лампа 5, показывакяцая, что система работает в автоматическом режиме.
Выключатель 5 прямого и обратного хода соединяется с рычагом переключения прямого и обратного хода LL. Во время прямого движения контактная пластина R размыкает контакты бд и 6д, в то время как контактная пластина F замыкает контакты 6 и 6 .Во время обратного хода контактная пластина Р замыкает контакты, а контактная пластина F размыкает.
Реле 7 давления для установки нагрузки сконструировано таким образом, чтобы замыкать контакт С., когда давление в передней части цилиндра 8 наклона достигает определенного установленного уровня, и чтобы замыкать контакт С, когда давление уменьшается ниже установленного уровня. Переключатель 9 вида проходка-рытье конструируется таким образом , чтобы замыкался контакт D 2 , когда рыхлитель работает в области А и замыкался контакт О у в области В. Выключатель 10 установки угла проходки и выключатель 11 установки угла рытья соединяются последовательно с контактами О и D переключателя 9 и находятся в замкнутом состоянии, но размыкаются, когда, соответственно достигаются заранее установленные углы проходки и рытья.
Лампа 12 подсоединяется таким образом, чтобы зажигаться, когда нагрузка на сошник становится чрезмерной и реле 7 давления замыкает контакт Ci, осуществляя включение сигнальной лампы перегрузки сошника. Реле 13 управления углом рытья предусматривается для управления сошником когда рыхлитель работает в режиме рытья или в области В, а реле 14 управления углом проходки предусматривается для управления сошником, когда рыхлитель работает в режиме проходки или в области А. Нижний установочный предельный выключатель 15 и верхний установочный предельный выключатель 16 нормально находятся в замкнутом состоянии, но когда рыхлитель достигает нижнего предельного положения или верхнего предельного положения, выключатели 15 и 16 размыкаются.
Трехпозиционный перепускной электромагнитный клапан 17 имеет три положения Н, 1 и J и катушки 18 и 19 соленоидов. Когда подается напряжени к катушке 18 соленоида клапан 17 перемещается в положение J ,а когда подается напряжение к катушке 19 соленоида, то он перемещается в положение Н. Когда не подается напряжение ни к одной из катушек, клапан находится в нейтральном положении 1 .
Двухпозиционный электромагнитный перепускной клапан 20 имеет два положения N и Р и катушку 20 соленоида и перемещается в положение N , когда подается напряжение к катушке 20 соленоида, и в положение Р при помощи пружины, когда не подается н пряжение к катушке 20 соленоида. Управляющий цилиндр 21 рыхлителя пр дусматривается с целью воздействия управляющего клапана 22 рыхлителя. Клапан 22 поддерживается в нейтраль ном положении. Однако, когда шатун поршня цилиндра 21 перемещается направо, клапан 22 перемещается в по11ожение К, в то время как, когда ша тун поршня перемещается налево,клапан перемещается в положение М. Клапан 23 подъема-наклона управляется при помощи двухпозиционного электромагнитного перепускного клапана 20 таким образом, что, когда клапан 20 находится з положении N, клапан 23 перемещается в положение Q, а когда клапан 20 находится в по ложении Р, клапан 23 перемещается в положение S . Система содержит масляный насос 24 для управления строи тельной земляной машиной и передающий насос 25, Канал 22(д управляющего канала 22 соединяется с выходной (нагнетающей стороной насоса 24 через трубку 26 и ветвь 27 трубки 26 подсоединяется к каналу 22 клапана 22 через обрат ный клапан 28, Канал 22 „ клапана 22 подсоединяется к резервуару 29. Каналы 22 и 22g подсоединяются к каналам 23д и 23 перепускного клапан подъема-наклона через трубки 30 и 31 соответственно. Каналы 23j. и 23 перепускного клапана подъема-наклона 21 подсоеди няются к передней стороне и стороне штока цилиндра 32 подъема через труб ки 33 и 34 соответственно. Каналы 23 и 23 перепускного клапана 23 подъема-наклона подсоединяются к передней стороне и стороне штока цилиндра 8 наклона через трубки 35 и 36 соответственно, а перепускной клапан 37 подсоединяется к трубке 35.Приемный элемент 38 давления этого перепускного клапана 37 подсоединяется к стороне штока цилиндра 8 наклона через трубку 39, в то время как передняя часть цилиндра 8 наклона подсоединяется к каналу приемника 5 да вления реле 7 давления для установки нагрузки. Выходная (нагнетательная) сторона Ьередающего насоса 25 подсоединяется к каналу 20 двухпозиционного электромагнитного перепускного клапана 20 через трубку 40, и к каналу 17 трехпозиционного электромагнитного перепускного клапана 17 через трубку 41. Каналы 2Од и 17 двухпозиционного электромагнитного перепускного клапана 20 и трехпозиционного перепускного электромагнитного клапана 17, соответственно, подсоединяются к резервуару 42. Канал 20с двухпозиционного электромагнитного -перепускного клапана 20 подсоединяется к каналу приемника 23 давления перепускного кланана 23 подъема-наклона через трубку 43. Каналы 17 и 17 трехпозиционного электромагнитного перепускного клапана 17 подсоединяются к передней стороне и стороне штока, соответственно, управляющего цилиндра 21 рыхлителя через трубки 44 и 45,соответственно. Переключающая схема 46 ручного управления рыхлителя содержит автоматически размыкающийся выключатель 47, выключатели 48 и 49 подъема и опускания, связанные с выключателем 47, автоматически размыкающийся выключатель 50, выключатели 51 и 52 наклона и выключатели 53 и 54 обратного наклона, связанные с выключателем 50. Один зажим каждого из выключателей 48, 49, 51,53,52 и 54 переключателей схемы 46 ручного управления рыхлителя подсоединяется к одному зажиму источника 55 питания. Подвижная контактная пластина 1д переключателя 1 ручное-автоматическое и подвижная контактная пластина Зд реле 3 безопасности также подсоединяется к тому же зажиму источника 55 питания. Контакт С, в автоматическом положении переключателя 1 ручное-автоматическое подсоединяется к подвижному контакту Зд.реле 3 безопасности, в то время как контакт С в ручном положении переключателя 1 ручное-автоматическое подсоединяется к зажиму 3с реле 3 безопасности. Другой или положительный зажим источника 56 питания подсоединяется к зажиму 3 реле 3 безопасности и к залсиму 3. , подсоединенному к стационарному (непЬдвижнси«у) контакту А реле 3 безопасности через сигнальную лампу 5 и проводник 56. Контакт С 2 реле 7 давления установки нагрузки подсоединяется к положительному зажиму источника 55 питания через сигнальную лампу 12 нагрузки и проводник 57. Контакт 130 реле 13 управления углом рытья и контакт 14jj реле 14 управления углом проходки также подсоединяется к положительному зажиму источника 55 питания через проводник 56. Один зажим из катушек 18 и 15 соленоидов трехпозиционного электромагнитного перепускного клапана 17 и один зажим катушки соленоида двухпозиционного электромагнитного перепускного клапана 20 также подсоединяются к положительному Зс1жиму источника 55 питания. Второй зажим катушки 20 соленоида двухпозиционного электромагнитного перепускного клапана подсоединятся к другим зажимам выключателей 52 и 54 переключающей схемы 46 ручного управления, второй зажим катушки 19 соленоида подсоединяется к контакту 14д выключателя F реле 14 управления углом проходки через верхний установочный предельный выключатель и проводник 58. Кроме того, второй зажим катушки 18 срленоида подсоединяется к контакту 13j выключателя 21 реле 13 управления углом рытья через проводник 59 и нижний установочный предельный выключатель 15.
Верхний контакт этого выключателя подсоединяется к контакту 14с2 вы-, Ключателя F реле 14 управления углхз
проходки к выключателю 45 опускания переключающей схемы 46 ручного управления рыхлителя и книжнему контакту выключателя 53 обратного наклона. Верхний зажим верхнего установочного предельного выключателя 16 подсоединяется к нижнему Зс1жиму выключателя 48 подъема переключающей схемы 46 ручного управления рыхлителя и к контакту 13 выключателя Е реле 13 управления углом рытья.
Нижний зажим выключателя 50 переключающей схемы 46 ручного управления подсоединяется к верхнему контакту 6 выключателя 53 обратного хода Р переключателя 6 прямого-обратного хода и к выключателю F, контактам 14 и 14 реле 14 управления углом проходки и к подвижным контактам 14 с.) и 14с 2 выключателей реле 13 управления углом рытья. Нижний контакт выключателя 50 подсоединяется к подвижному контакту 9р выключателя 9 способа управления проходкарытье и к подвижному контакту 5,. реле 7 давления установки нагрузки.
Верхний катушки 20,3 соленоида двухпозиционного электромагнитного перепускного клапана 20 подсоединяется к контакту 14с выключателя F реле 14 управления углом проходки и к контакту 13 ,выключателя Е, реле 13 управления углом рытья
Подвижный контакт 14 выключателя F реле 14 управления углом проходки подсоединяется к контакту 6 реверсивного контакта переключателя 6 вперед-назад через диод 60 и к контакту С 1 реле 7 давления установки нагрузки через диод 61. Контакт 14 реле 14 управления углом проходки подсоединяется к контакту О переключателя 9 способа управления проходка-рытье через проводник 62 и выключатель 10 установки угла проходки. Контакт 130 реле 13 управления рытья подсоединяется к контакту 0 переключателя 9 способа управления проходка-рытье через проводник 62 и выключатель 11 установки угла рытья.
Подвижный контакт 13 выключателя F реле 13 управления углом рытья подсоединяется к контакту 6 контакта движения вперед переключателя 6 вперед-назад, в то время как контакт 4 контакта переднего хода
F подсоединяется к контакту С реле 7 давления установки нагрузки.
Верхний зажим выключателя 47 переключающей схемы 46 ручного управления подсоединяется к контакту 3. выключателя А реле 3 безопасности, в то время как нижний зажим выключателя 47 подсоединяется к верхнему зажиму выключателя 50.
Система работает следующим образом.
Различные выключатели и контакты показаны в условиях, когда источник питания еще не подключен и, следовательно, катушка соленоидов злектромагнитных перепускных клапанов 20 и 17 обесточены. Переключатель способа управления проходка-рытье показан в положении Проходка, т.е. для работы в области А. Таким образом, рьлхлитель поднимается до верхнего предельного положения и останавливается в этом положении.
Операция автоматического управления рыхлителя может начаться при включении источника 2 питания и затем при перемещении подвижного контакта IQ переключателя 1 ручное-автоматическое к контакту С от контакта С .
После замыкания выключателя источника 2 питания, когда переключатель ручное-автоматическое установлен в положение Автоматическое к контакту С, катушка реле 14 управления углом проходки возбуждается и приводит к тому, что обеспечивается высота подъема сошника рыхлителя для проходки области А (случай, когда переключатель 9 выбора режима на.ходится в положении D). Затем ток протекает через цепь, включающую источник 55, катушку 18 соленоида, выключатель 15, контакты 14j; и 14 и выключатели 50 и 47, при этом возбуждающие катушку 48 соленоида опускания электромагнитного перепускного клапана 17. В результате этого, клапан 17 переключается в положение J, в управляющий клапан 22 рыхлителя переключается в положение К при помощи управляющего цилиндра 21 рыхлителя. Таким же образом ток потечет через цепь, включающую источник 55 питания, катушку 20j3 соленоида, контакты выключатели 50 и |47 для возбуждения катушки 20 соленоида, вследствие чего электромагнитны клапан 20 переключается в положение В результате вспомогательное давление воздействует на перепускной клапан 23 подъема-наклона через трубку 43 таким образом, что клапан 23 переключается в положение для управления цилиндром 8 наклона, и таким образом осуществляет наклон назад сошника рыхлителя (цилиндр втягивается (операция ОР). Этот наклон назад продолжается до тех пор, пока не
разомкнется установочный выключатель 10 угла проходки, т.е. пока не будет достигнут оптимальный угол проходки. Установочный выключатель 10 угла проходки поддерживается в замкнутом состоянии до тех пор, пока цилиндр 8 втягивается, чтобы установить свою выступающую часть против выключателя 10. Однако выключатель 10 размыкается, когда выступающая часть проходит мимо него.
Подвижный контакт 9а переключателя проходка-рытье замыкает контакт О У до тех пор, пока он нажат штоком 33, связанным с шатуном поршня цилиндра 32 подъема, и замыкает контакт D , когда выключатель 9 не нажат штоком 33.
Когда установочный выключатель 10 угла проходки размыкается, катушка реле 14 управления углом проходки обесточивается для размыкания контактов 14 и 14с выключателя f так что катушка 20 соленоида перепускного клапана 20 обесточивается, таким образом перемещая электромагнитный перепускной клапан в положения Р. Соответственно, перепускной клапан 23 подъема наклона переключается в положение для управления цилиндром 32 подъема. Так как рычаг управления прямого-обратного хода находится в положении Вперед и так как контакт F переключателя прямого-обратного хода замкнут, а его контакт Р разомкнут, то цепь, включающуя выключатель 15, контакты 13J и 13 и контакт Вперед устанавливается таким образом, что катушка 18 соленоида возбуждается для перемещения электромагнитного перепускного клапана 17 в положение J. Вследствие этого, клапан 22 перемещается в положение К и сошник рыхлителя начинает опускаться (операция OR)
Когда переключатель 9 проходкарытье переходит в положение 0, катушка реле 13 управления углом рытья возбуждается, так что выключатели В., Е и Е переходят в положения противоположные тем, которые показаны. Вследствие этого, связь между контактами 13 и 13. разъединяется, обесточивая катушку соленоида. Затем операция перемещения выключателя Е соединяет контакты 13, та что катушка 20(3соленоида возбуждается для перемещения двухпозициоиного электромагнитного перепускного клапана 20 в положение N, при этом перемещая перепускной клапан 23 подъема-наклона в положение Q .В то же CciMoe время, при перемещении выключателя Е контакты 13(.. соединяются, так что катушка 19 соленоида возбуждается для перемещения электромагнитного перепускного клапана 17 в положение Н. В результате этого, управляющий цилиндр рыхлителя
втягиваетая и клапан 22 перемещается в положение М. Соответственно, движение опускания сошника прекращается и цилиндр наклона немедленно вытягивается, чтобы наклонить сошник (операция ОР2). Эта операция наклона продолжается до тех пор, пока установочный выключатель 53 угла рытья разом;кнут.
При размыкании установочного выключателя 11 угла рытья, реле 13 управления углом рытья обесточивается для перемещения выключателей Е
Ч
Е, и Е 3 Перемещение выключателя Е.
13
приводит к разделению контактов
в
и к обесточиванию катушки 20 соленоида электромагнитного перепускного клапана 20, возвращая его в положение Р. Соответственно, перепускной клапан 23 подъема-наклона принимает положейие S .В то же время контакты 13 и 13 объединяются при помощи выключателя Е для возбуждени катушки 18 соленоида. Таким образом, электромагнитный перепускной клапан 17 перемещается в положение 3, чтобы привести клапан 22 через цилиндр 21. В результате этого , цилиндр 21 подъема вытягивается, чтобы снова опустить сошник рыхлителя (операция ОР ) Сошник рыхлителя находится в вырытой земле или породе в нижнем положении, когда нагрузка на сошник рыхлителя увеличивается так, что давление, действующее на переднюю стенку цилиндра наклона, превышает установленное давление нагрузки реле 7 давления, подвижный контакт реле 7 давления переходит к контакту С Затем загорается лам11а 12 перегрузки и когда цепь, проходящая, через катушки 19 соленоида, выключатель 16 контакты 14о и 14 , диод 61, реле 7 давления, выключатели 50 и 47, контакты переключатель 1 ручное-автоматическое устанавливается параллельно источнику питания, то катушка 19 соленоида возбуждается, переключая электромагнитный клапан 17 в положение Н. Следовательно, клапан 22 переключится в положение М. Когда положение электромагнитного клапана 20 и перепускного клапана 23 подъема наклона не изменяется,сошник рыхлителя поднимается (операция ОР) .Когда -сошник поднимается,нагрузка на него уменьшается и тогда давление масла, действующее на переднюю часть цилиндра 8 наклона, становится ниже, чем установленное давление нагрузки реле 7 давления. Реле 7 давления 3cuvMKaeT контакт С, перемещая электромагнитный перепускной клапан 17, при этом сошник опускается. Эта операция автоматически повторяется в течение операции рытья рыхлителя.
Когда сошник рыхлителя достигает оптимального угла рытья, установочный выключатель 11 угла рытья раз мы-)
кается, обесточивая катушку реле 13 управления углом рытья и переключая электромагнитный перепускной клапан 20 в положение Р, и переключая перепускной клапан 23 подъема-наклона в положение S. Электромагнитный перепускной клапан 17 воздействует на управляющий цилиндр 21 рыхлителя и управляющий клапан 22 рыхлителя, ne.-f реключается в положение М для управления цилиндром 32 подъема, поднимая сошник рыхлителя (операция OPi ).
Когда сошник рыхлителя поднимается для перехода к операции проходки в области А от операции рытья из области В, т.е. когда переключатель 9 проходка-рытье принимает положение 02,катушка реле 14 управления углом проходки возбуждается для замыкания цепи катушки 18 соленоида электромагнитного перепускного клапана 17 и катушки 20 соленоида электромагнитного перепускного клапана 20, так что сошник рыхлителя наклоняется назад до тех пор, пока не разомкнется установочный выключатель 10 угла проходки (операция ОР ) .
Когда установочный выключатель 10 угла проходки размыкается, то реле управления углом проходки обесточивается для за1 1ыкания его выключателя F при этом снова поднимается сошник рыхлителя (операция ОР).
Когда сошник рыхлителя поднимается и вер/ний установочный предельный выключатель 16 размыкается, сошник рыхлителя останавливается в этом положении.
Если необходимо- управлять вручную сошником рыхлителя во время автоматического управления, его схема автоматически размыкается выключателем 47 схемы 46 ручного управления рыхлителя и переключатель 19 управляется, чтобы размыкать цепь автоматического управления, выключатели 48 и 49 соединяются с выключателем 47, а выключатели 51, 52,53 и 54 соединяются с выключателем 50, так чтобы обеспечивалась возможность ручного управления сошником рыхлителя.
Приведенное выше описание показывает один пример из серии автоматических .операций, использующихся во время прямого движения, включая операции наклона назад сошника до установленного угла проходки при режиме проходки, опускания после такой установки, наклона до установленного угла %зытья в режиме, рытья, подъема сошника во время перегрузки, опускаНИН сошника до нижнего предельного положения и подъема сошника до верхнего предельного положения, которые во время обратного движения осуществляются аналогично описанным выше.
Использование предлагаемого изобретения позволяет повысить нгщежность управления, расширить функциональные возможности системы и повысить производительность рыхлителя.
Формула изобретения
Система автоматического управления рабочим органом рыхлителя, содержащая рабочие цилиндры подъема и наклона рыхлителя, связанные с электромагнитным приводом подъема и наклона рыхлителя через перепускной клапан, источник питания, датчики верхнего и нижнего положения рабочего органа,датчик нагрузки на рыхлитель, датчики установки угла рыхлителя при проходке и рытье, переключатели режима работы и вида управления, причем датчики установки угла рыхлителя при проходке и рытье соединены посредством электрической цепи с обмотками электромагнитного привода подъема и наклона рыхлителя, отличающаяся тем, что, с целью повышения надежности управления и расширения функциональных возможностей системы, она снабжена переключающей схемой ручного управления рыхлителя и реле безопасности, причем переключающая схема ручного управления рыхлителя подключена чере датчики верхнего и нижнего положения к обмоткам электромагнитного привода а реле безопасности включено между переключателем режима работы и источником питания.
2.Система по п.1, отличающая с я тем, что она снабжена механически связанными между собой управляющими цилиндром и клапаном рыхлителя, причем управляющий гидроцилиндр соединен -гидравлически с электромагнитным приводом подъема и наклона рыхлителя, а управляющий клапан с перепускным клапаном.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР № 139678, кл. Е 02 F 9/22, 1969. 2. Авторское свидетельство СССР 240309, кл. Е 02 F 9/22, 1968.
3.Авторское свидетельство СССР № 326316, кл. Е 02 F 9/20, 1970.
4.Авторское свидетельство СССР № 218743, кл. Е 02 F 9/20, 1967 (прототип).
П
Л
39.