(54) УСТРОЙСТВО ДЛ ПРИВОДА ДВУХ РАБОЧИХ ВАЛСВ, ПРЕИМУЩЕСТВЕННО ВАЛКОВ ПРОКАТНЫХ СТАНОВ
1
Изобретение отнсюится преимущес венио к черной и нветной метаяпзфгии.
Технический уровень конструкций привоаов современньп прокатных станов определяется возрастанием скорости прокатки и крутящих моментов, а также повьппением гибкости регулирования уровня и соотношения скоростей валков.
Наиболее предпочтительным для привода валков прокатного страна вращаку- j0 шихся с различными скоростями по отношению друг к другу, является индивидуальный, либо дифференциальный привод. Последнийвключает в качестве основного элемента дифференциальный редуктор. 15
Привод с дифференциальным редукторомвьп дно отличается от индивидуального привода тем, что в случае работы одного из валов в реактивном режиме позволяет го рекуперировать механическую энергию и тем самым понизить установочную, мощ- ность двигателей привода до минимальнонеобходимого значения tl
Однако дифференциальный привод сложен в конструктивном отн(ицении, имеет большой вес и габариты, а значительное число кинематических связей приводит к дополнительным потерям мощности и снижению коэффициента полезного действия.
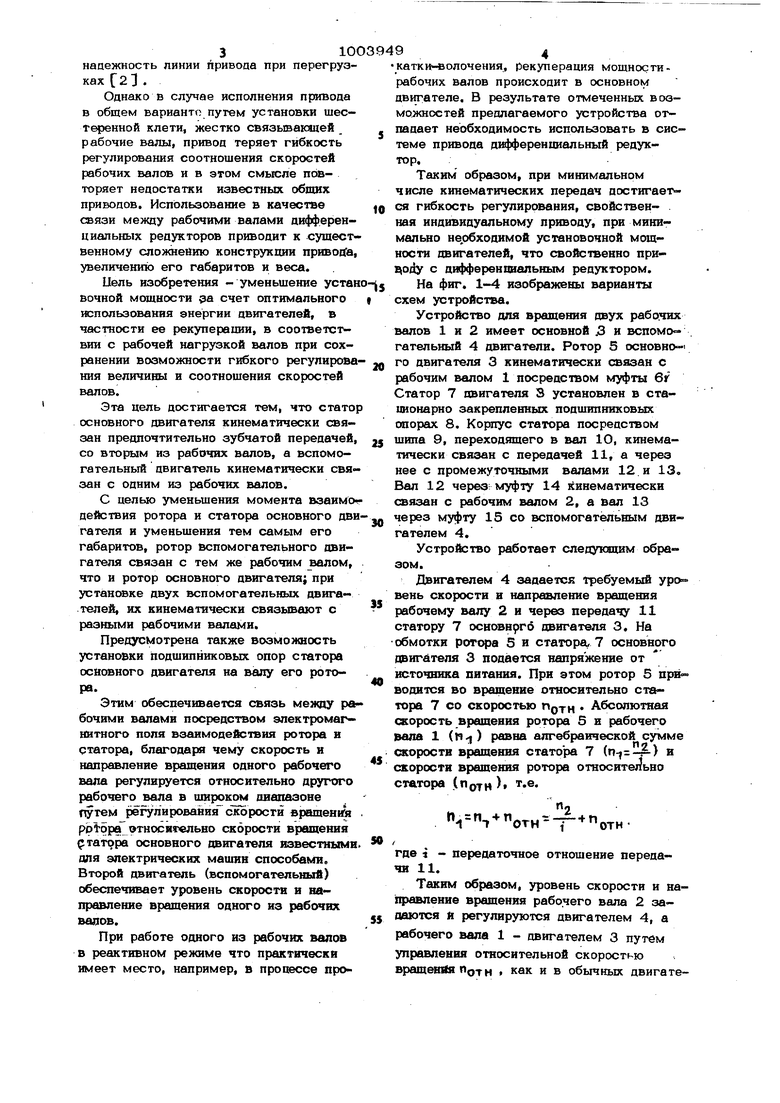
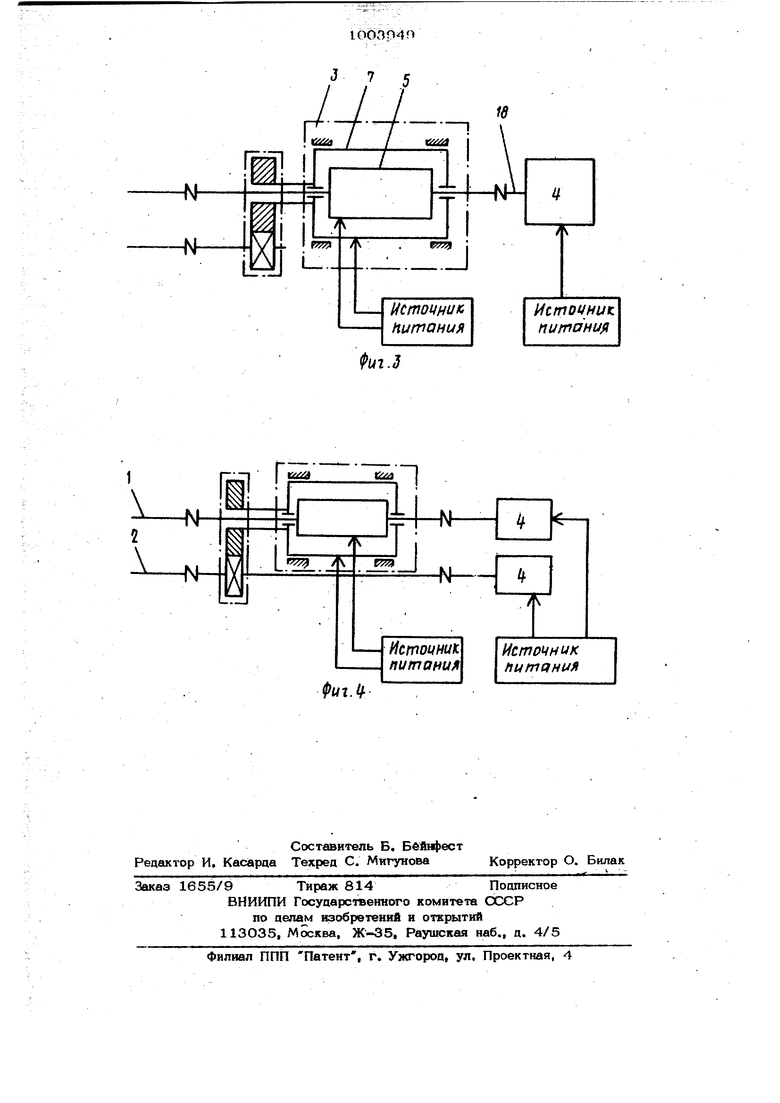
Известен пр1шод рабочих валков, содержащий, по меньшей мере, один основной двигатель, вал ротора которого кинематически связан с одним из рабочих валов, а статор установлен с возможностью вращения в подшипниковых опорах, соосных ротору, и , по меньшей . мере, один вспомогательный двигатель со стационарным статором г кинематически связанный с одним из элементов основного двигателя. Привод может быть вьшолнен как в индивидуальном, гак и в общем вариантах. Общий вариант предполагает установку шестеренной клети меэдду рабочими валами. Привод решает ряд проблем, связанных с повышением оборотов рабочих валов, а также повышает надежность пинии йривоаа при перегрузках С 2 3 . Однако в случае исполнения привода в общем варианте путем установки шестеренной клети, жестко связывакшей рабочие валы, привод теряет гибкость регулирования соотношения скоростей рабочих валов и в этом смьюпе повторяет недостатки известных общих приводов. Использование в качестве связи между рабочими валами дифференциальных редукторов приводит к сущест венному сложнению конструкшга привода увеличению его габаритов и веса. Цель изобретения - уменьшение уста вочной мощности 9а счет оптимального использования энергии двигателей, в частности ее рекуперации, в соответствии с рабочей нагрузкой валов при сохранении возможности гибкого регулирования величины и соотношения скоростей Эта цель достигается тем, что статор основного двигателя кинематически связан предпочтительно зубчатой передачей, со вторым из рабочих валов, а вспомогательный двигатель кинематически связан с одним из рабочих валов. С целью уменьшения момента взаимо-действия ротора и статора основного дв гателя и уменьшения тем самым его габаритов, ротор вспомогательного двигателя связан с тем же рабочим алом, что и ротор основного двигателя при установке двух вспомогательных двигателей, их кинематически связывают с разными рабочими валами. Предусмотрена также возможность установки подшипниковых опор статора осиовного двигателя на валу его ротора. Этим обеспечивается связь мегкду ра бочими валами посредством электромагнитного поля взаимодействия ротора и статора, благодаря чему скорость и направление вращения одного рабочего вала регулируется относительно рабочего вала в широком диапазоне путем рё гулирования скоростй вращения pptqpeT относительно скорости вращения татора основного двигателя известным для электрических машии способами. Второй двигатель (вспомогательный) обеспечивает уровень скорости и направление вращения одного из рабочих валов. При работе одного из рабочих валов в реактивном режиме что практически имеет место, например, в процессе прокатки-волочения, рекуперация мощностирабочих валов происходит в основном двигателе. В результате отмеченных возможностей предлагаемого устройства отпадает необходимость использовать в системе привода дифференциальный редуктор. Таким образом, при минимальном числе кинематических передач достигается гибкость регулирования, свойствеиная индивидуальному приводу, при минимально нербходимой установочной мощности двигателей, что свойственно с дифференциальным редуктором. На фиг. 1-4 изображены варианты схем устройства. Устройство для вращения двух рабочих валов 1 и 2 имеет основной ;3 и вспомо гательиый 4 двигатели. Ротор 5 основного двигателя 3 кинематически связан с рабочим валом 1 посредством муфты бг Статор 7 двигателя 3 установлен в стационарно закрепленных подшипниковых опорах 8. Корпус статора посредством шипа 9, переходящего в вал 10, кинематически связан с передачей 11, а через нее с промежуточными валами 12 и 13. Вал 12 через муфту 14 кинематически связан с рабочим валом 2, а вал 13 через муфту 15 со вспомогательным двигателем 4. Устройство работает следующим образом. Двигателем 4 задается требуемый уро °вень скорости и направление вращения рабочему валу 2 и через передачу 11 статору 7 ОСНОВН9Г6 двигателя 3, На обмотки ротора 5 я статора- 7 основного двигателя 3 подается напряжение от источника питания. При этом ротор 5 при водится во вращение относителЕ о статора 7 со скоростью П0тн Абсолютная скорость вращения ротора 5 и рабочего вала 1 (м) равна алгебраической сумме скорости вращения статора 7 () и скорости вращешш ротора относите ьно статора ( ), т.е. где i - передаточное отношение передачи 11. Таким образом, уровень скорости и направление вращения рабочего вала 2 задаются и регулируются двигателем 4, а рабочего вала 1 - двигателем 3 путем управления относительной скоростью вращения Пот , как и в обычных двигателях. Соотношение скоростей рабочих валов может регулироваться как путем иэ менения 2 , так и Потн следует КЗ формулы 5 «и -1- 1 При работе рабочего вала 2 в реакти ном режиме (мощность поступает не от устройства к рабочему валу, а от вала к устройству), что может иметь место на практике, мощность от вала 2 через муфту 14, промежуточный-вал 12 и переоачу 11 передается статору 7, который, в свою очередь, через магнитное попе передает мощность ротору 5 и рабочему валу 1, работающему в активном рехшме. Указанное обстоятельство обеспечивает работу двигателей 3 и 4 в активном (двигательном) режиме. В результате суммарная установочная мощность двигателей Nj не превы шает минимально необходимого значения petBHOro гшгебраической {с учетом знака) сумме мощностей на рабочих валах 1 и 2 т е ,, При индивидуальномприводе рабочих в рассмотренном режиме бьшо бы N,,MN3hlN4|-|NJMN2| Очевидно, что |N,|4lNj, + N, Аналогичным образом происходит рекуперация энергии в основном двигателе и в случае работы вала 1 в реактивном режиме. С целью упрощения конструкции1-ко{ пуса статора 7 и уменьшения диаметра подшипниковых опор 8 валы. 16 ротора осйовного двигателя 3 вьшолнены удлиненными, что позволяет установить их в стационарно закрепленных подшипни ковых опорах 8 (фиг. 2), а статор 7 установлен на подшипниках 17,которые расположены на вращающихся валах 16 ротора 5. С аелью уменьшения крутящего момент взаимодействия ротора 5 н статора 7 двигателя 3 и уменьшения его габаритов выходной вал 18 ротора Фигателя 4 кинематически связан с те же рабочим валом, что и ротор двигателя 3 (фиг. 3). При установке двух вспомогательных . двигателей 4 один из них кинематическ связан с рабочим валом 1, а другой ки149 нематически связан с рабочим валом 2 (фиг. 4). Таким образом, в результате исрользования связи между рабочими валами посредством взаимодействующих электромагнитных полей ротора и статора основного двигателя в предлагаемом устройстве сочетается простота, свойственная индивидуальному приводу, и обеспечивается минимально необходимая мощ- . ность двигателей, что характерно для привода с дифференциальным редуктором. Указанное обстоятельство позволяет уменьшить габариты, вес, упростить конструкцию, повысить надежность, точность и гибкость в управлении вращением рабочих валов, а также повысить коэффвшент полезного действия привода в целом. Предлагаемый привод не иcключael и других возможных схем в частности, связанных с использованием .понижающих редукторов, передач с коническими шестернями для привода непараллельных рабочих валов и т.п. Формула .изобретения 1.Устройство для привода дЗУх рабочих валов, преимущественно валков прокатных станов, содержащее, по меньшей мере, один основной двигатель, вал ротора которого кинематически связан с одним из рабочих валов, а статор установлен с возможностью вращения в подшипниковых опорах, соосных ротору, и, , по меньшей мере, один вспомогательный двигатель со ставяонарным статором, кинематически связанный своим ротором с одним из элементов основного двигателя, отличающееся тем, что, с целью уменьшения установочной мощности за счет сштимального использования энергии двигателей, в частности ее рекуперашга, в соответствии с рабочей нагрузкой валов при сохранении возможности гибкого регулирования величины и соотношения скоростей валов, статор кинематически связан предпочтительно зубчатой передачей, со вторым tra рабочих валов, а вспомогательный двигатель кинематически связан с одним из рабочих валов. 2.Устройство по П.1, о т л и ч а ю щ е е с я тем, что, с целью уменьшения момента взаимодействия ротора и статора основного двигателя и уменьшения тем самым его габаритов, ротор вспомогательного двигателя связан с тем 710 же рабочим валом, что в ротор основного двигателя. 3.Устройстео по п. 1, о т л и ч а ю щ е е о я тем, что при установке двух вспомогательных двигателей, их кинематически связывают с разными рабочими валами. 4,Устройство по п. 1, о т л и ч а ю щ е е с я тем, что лоашипниковые J 7-5 Источник питания В 10 49 опоры статора основного двигателя установлрчм на валу его ротора. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР N9 275972, кл. В 21 В 35/00, 1976. 2.Авторское свидетельство СССР № 651864, кл. В 21 В 35/00, 1976. Источник numcfHi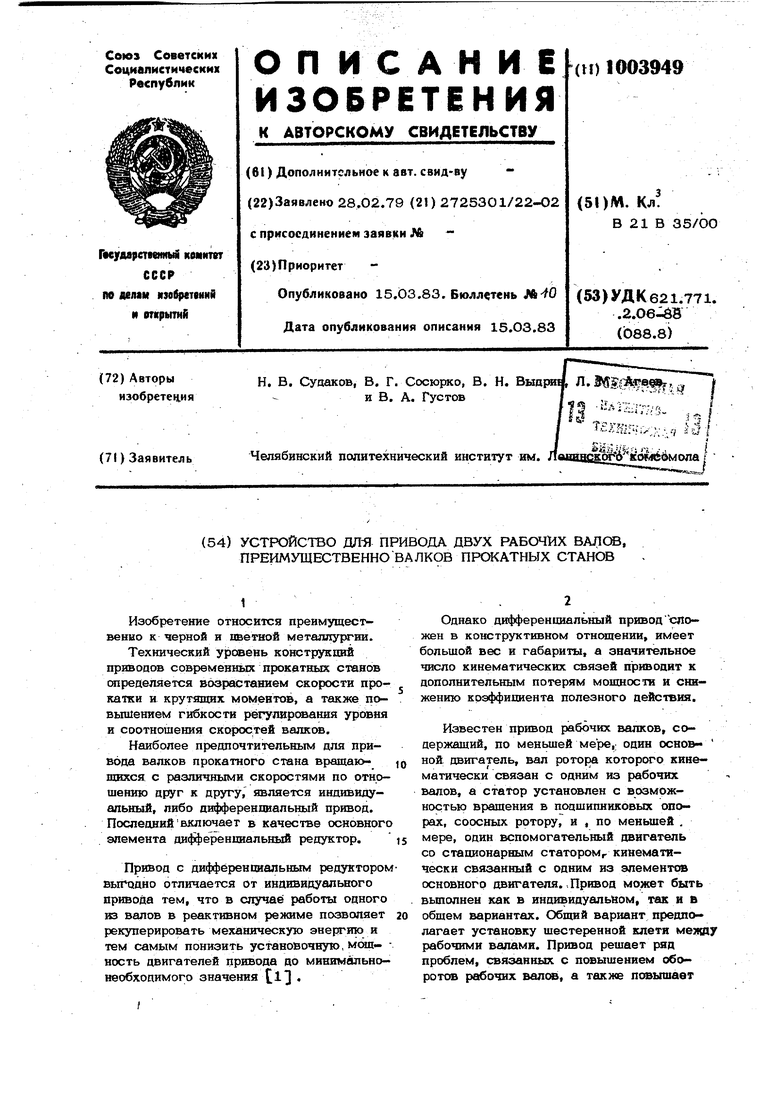
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРИВОД ПРОКАТНОГО СТАНА | 2007 |
|
RU2348475C1 |
| ПРОКАТНАЯ КЛЕТЬ | 1994 |
|
RU2087220C1 |
| Привод рабочей клети прокатного стана | 1969 |
|
SU327734A1 |
| ЭЛЕКТРО-ИНЕРЦИОННОЕ УСТРОЙСТВО К ЭЛЕКТРОМОБИЛЮ | 2002 |
|
RU2230220C2 |
| РЕВЕРСИВНЫЙ ПРОКАТНЫЙ СТАН | 1996 |
|
RU2112614C1 |
| Привод валков прокатного стана | 1976 |
|
SU651864A1 |
| Валковая мельница | 1979 |
|
SU871818A1 |
| ПРЯМОЙ ПРИВОД ДЛЯ РОЛИКОВ, ВАЛКОВ И ЛЕБЕДОК В ЧЕРНОЙ И ЦВЕТНОЙ МЕТАЛЛУРГИИ | 2018 |
|
RU2741604C1 |
| ГЕНЕРАТОР ЭЛЕКТРИЧЕСКОГО ТОКА, ПРИМЕНЯЕМЫЙ НА РЕЛЬСОВОМ ТРАНСПОРТЕ | 2009 |
|
RU2406629C1 |
| Привод двухвалковой дробилки | 1979 |
|
SU869805A1 |
3 7 5 Источник питания Фиг.2 8 16 N- Источник яитания
