(54) ПРШЗОД ДВУХВАЛКОВОЙ ДРОБИЛКИ
| название | год | авторы | номер документа |
|---|---|---|---|
| Привод двухвалковой дробилки | 1979 |
|
SU822887A1 |
| Бесступенчатая коробка передач | 2023 |
|
RU2806843C1 |
| ПРИВОД ЭСКАЛАТОРА | 1992 |
|
RU2025444C1 |
| Судовая дизель-редукторная установка | 1981 |
|
SU1031846A1 |
| Ведущий мост транспортного средства, его варианты | 1982 |
|
SU1049275A1 |
| Двухвалковое устройство для дробления | 1979 |
|
SU856544A1 |
| Привод эскалатора | 1983 |
|
SU1245537A1 |
| ЗУБЧАТАЯ ПЕРЕДАЧА | 1971 |
|
SU311768A1 |
| ГЛАВНАЯ ПЕРЕДАЧА | 1998 |
|
RU2142885C1 |
| Манипулятор | 1983 |
|
SU1094734A1 |
1
Изобретение относится к области устройств для сдавливаш1я материала между валками, в частности, к редуктор ному приводу этих устройств и может быть использовано в горнодобывающей, химической, стройматериалов и других отраслях промышленности.
Известен привод двухвалковых дробилок , содержащий два сцепленных между собой синхронизирующих колеса с удлиненными зубьями, жестко скрепленные с алками, шестерню, сцепленную с одним из синхронизующих колес, двигатель и понижающий редуктор, связывающий их Г 1 Т.
Этому приводу свойственны следующие недостатки: диаметр каждого синхронизующего колеса должен быть равен межцентровому расстоянию валков: из-за передачи больших усилий осевые габариты и масса синхронизующих колес достигают значительных величин; потери на трение в зацепление синхронизующих колес достаточно велики; синхронизующие колеса имеют удлиненные зубья, изгибная прочность которых лимитирует передаваемую валком мощность. По своей технической сущности наиболее близким к изобретению является привод двухвалковой дробилки,.содержащий опорные валы рабочих валков, соединенных между собой посредством зубчатой передачи на параллельных валах, и планетарно-дифференхщальный
10 редуктор, ведомое вод1то и эпициклическ-ое колесо которого связаны меж- ду собой и с ведущей солнечной шестерней посредством сателлитов с возможностью свободного вращения на осях закрепленных в водиле f2j.
Недостатки этого привода заключаются в том, что планетарно-дифференхшальный редуктор работает как дифференциальный лишь на режимах, отличных от номинального, выполняя фактически роль предохранительного звена: при работе планетарно-дифференциаль- ного редуктора как дифференциального
редуктора энергия, расходуемая на перемещение груза или на т1роскальзывание муфты предельното момента, тратится вхолостую.
Целью изобретения является повышение надежности работы и улучшение технико-экономических показателей дробилки.
Цель достигается тем, что в приводе двухвалковой дробилки, содержащем опорные валы рабочих валков, соединенных между.собой посредством зубчатой передачи на параллельных валах и планетарно-дифференциальный редуктор, ведомое водило и эпициклическое колесо которого связаны между собой и с ведущей солнечной тестерней посредством сателлитов с возможностью свободного вращения на осях, закрепленных в аодиле, зубчатая передачавыполнена в виде двухветвевой системы находящихся в зацеплении зубчатых колес для каждого из рабочих валков, посредством которых валки кинематически соединены соответственно с ведомым водилом и эпициклическим колесом планетарно-дифференциального редуктора, при этом зубчатые колеса, кинематически соединенные с водилом, выполнены полыми
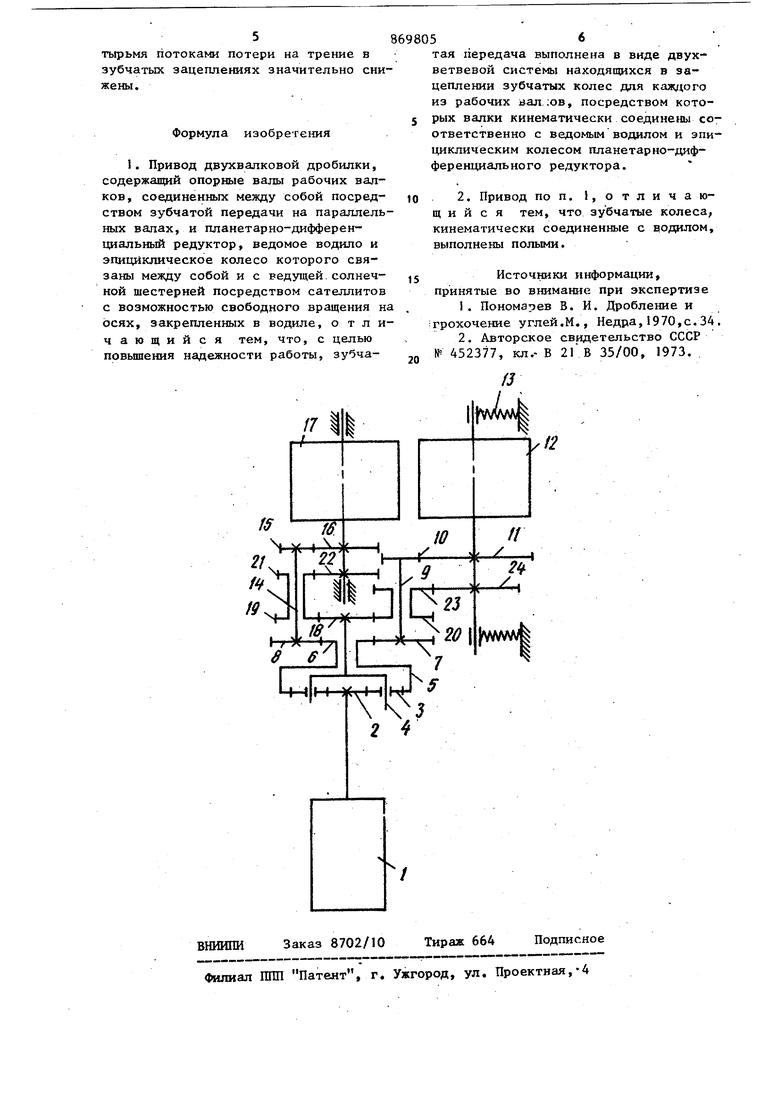
На чертеже схематически в виде показан привод двухвалковой дробилки.
Привод состоит из двигателя 1, на валу которого неподвижно закреплена солнечная шестерня 2, входящая в зацепление с сателлитами 3, которые свободно вращаются на своих осях, закрепленных в водиле 4. Сателлиты входят в зацепление с спициклом 5, сблокированным с шестерней 6, которая входит в зацепление с зубчатыми колесами 7 и 8. Зубчатое колесо 7 неподвижно посажено на вал 9, на другом конце которого неподвижно закреплена шестерня 10, входящая в зацеплени с зубчатым колесом 11, имеЮ1ЦИМ удпиненные зубья. Зубчатое колесо 11 неподвижно прсажено на приводной вал рабочего валка 12, имеющего подпружиненные опоры 13. Зубчатое колесо 8 неподвижно посажено на вал 14, на другом конце которого неподвижно закреплена шестерня 15, входящая в зацепление с зубчатым колесом 16, неподвижно посаженным на приводной вал рабочего валка 17.
Водило 4 пропущено-через полый эпицикл 5 и сблокировано с шестерней
18, входящей в зацепление с полыми зубчатыми колесами 19 и 20, Зубчатое колесо 19 сблокировано с полой шестерней 21, входящей в зацепление с зубчатым колесом 22, неподвижно посаженным на приводной вал валка 17 Зубчатое колесо 20 сблокировано с полой шестерней 23, входящей в зацепление с зубчатым колесом 24, которое неподвижно посажено на приводной вал валка 12 и имеет удлиненные зубья. Через полые блоки зубчатых колес 19/ 21 и 20f 23, пропущены валы 14 и 9 соответственно.
Устройство pa jOTaeT следующим образом. Двигатель 1 вращает солнечную шестерню 2, которая передает вращение сателлитам 3 и эпициклу 5. Благодаря закреплению осей сателлитов 3 в Бодиле 4 и отсутствию опорного момента, водило 4 также вращается, но в противоположную сторону по отношению к эпициклу 5, причем вращени водила и эпицикла происходит с разными угловыми скоростями. Водило передает вращение шестерне 18, которая через систему зубчатых колес 20, 23, 24 передает вращение валку 12 в одну сторону и через систему зубчатых колес 19, 21, 22 передает вращение в противоположную сторону валку 17.
Таким образом, каждош валок через соответствующую систему зубчатых колес получает вращение от эпицикла и водила, благодаря чему осуществляется синхронизация вращения обоих вапг ков. Подпружиненные опоры 13 обеспечивают подвижность валка 12 при попадании в дробилку недробимого материала.
Технико-экономические преимущества изобретения обусловлены тем, что благодаря особенностям кинематики, передаточное число планетарно-дифференциального редуктора .вдвое больше передаточного числа планетарно-дифференциального редуктора известного привода при прочих равных условиях, что значительно снижает общее число ступеней редуктора, существенно уменьшает массу и линейные габариты привода, кроме того, мощность к каждому валку подводится двумя потоками (от эпицикла и водила), что повышает надежность работы привода и снижает габариты и массу обеих систем зубчатых колес, благодаря передаче мощности от двигателя обоим валкам четырьмя потоками потери на трение в зубчатьк зацеплениях значительно снижены .
Формула изобретения
Источники информации,
принятые во внимание при экспертизе
iгрохочение углей.М., Недра,1970,с.34.
/J
