(5t)CnOCOB КОНТРОЛЯ СОСТОЯНИЯ ПОДШИПНИКОВ КАЧЕНИЯ ПО ВРЕМЕНИ ВЫБЕГА
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ виброакустической диагностики подшипников качения и устройство для его осуществления | 1988 |
|
SU1582044A1 |
| Устройство для диагностики состояния подшипника качения | 1990 |
|
SU1767377A1 |
| СПОСОБ ВИБРОАКУСТИЧЕСКОЙ ДИАГНОСТИКИ МЕЖВАЛЬНЫХ ПОДШИПНИКОВ КАЧЕНИЯ ДВУХВАЛЬНЫХ ТУРБОМАШИН И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2001 |
|
RU2200942C2 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПОДШИПНИКОВ КАЧЕНИЯ | 1996 |
|
RU2093810C1 |
| СПОСОБ БЕЗРАЗБОРНОЙ ДЕФЕКТАЦИИ И ПРОГНОЗИРОВАНИЯ РАБОТОСПОСОБНОСТИ РАБОЧИХ ПОВЕРХНОСТЕЙ ПОДШИПНИКОВ КАЧЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2095776C1 |
| Устройство для контроля технического состояния подшипников качения | 1981 |
|
SU1003119A1 |
| СПОСОБ ВИХРЕТОКОВОГО КОНТРОЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2371714C2 |
| Устройство для контроля состояния подшипников качения | 1984 |
|
SU1164569A1 |
| Автомат для сортировки подшипников качения по времени выбега | 1983 |
|
SU1105769A1 |
| Устройство для вибрационной диагностики состояния подшипников качения | 1983 |
|
SU1174811A1 |
1
Изобретение относится к подшипниковой промышленности и может быть использовано для контроля состояния подшипников качения по времени выбега.
Известен способ контроля состояния подшипников качения по времени выбега путем приведения Их во вращение и определения параметра, характеризующего состояния подшипни- ц, ка на выбеге 1 |Однако известный способ имеет низкую точность и производительность.
Цель изобретения - повышение точ- 15 ности и производительности за счет того, что в качестве параметра, характеризующего состояние подшипника на выбеге, выбирают его вибрацию,
Поставленная цель достигается за 20 счет того, что согласно способу конт-. роля состояния подшипников качения по зремени выбега путем приведения их во вращение и определения параметра, характеризующего состояние подшипника на выбеге,в качестве параметра, характеризующего состояние подшипника на выбеге, регистрируют сигнал вибрации подшипника, непрерывно измеряют его, преобразуют полученный си|- нал в прямоугольный импульс, интегрируют его во времени и, сравнивая результат интегрирования с эталонным прямоугольным импульсом, определяют состояние подшипника.
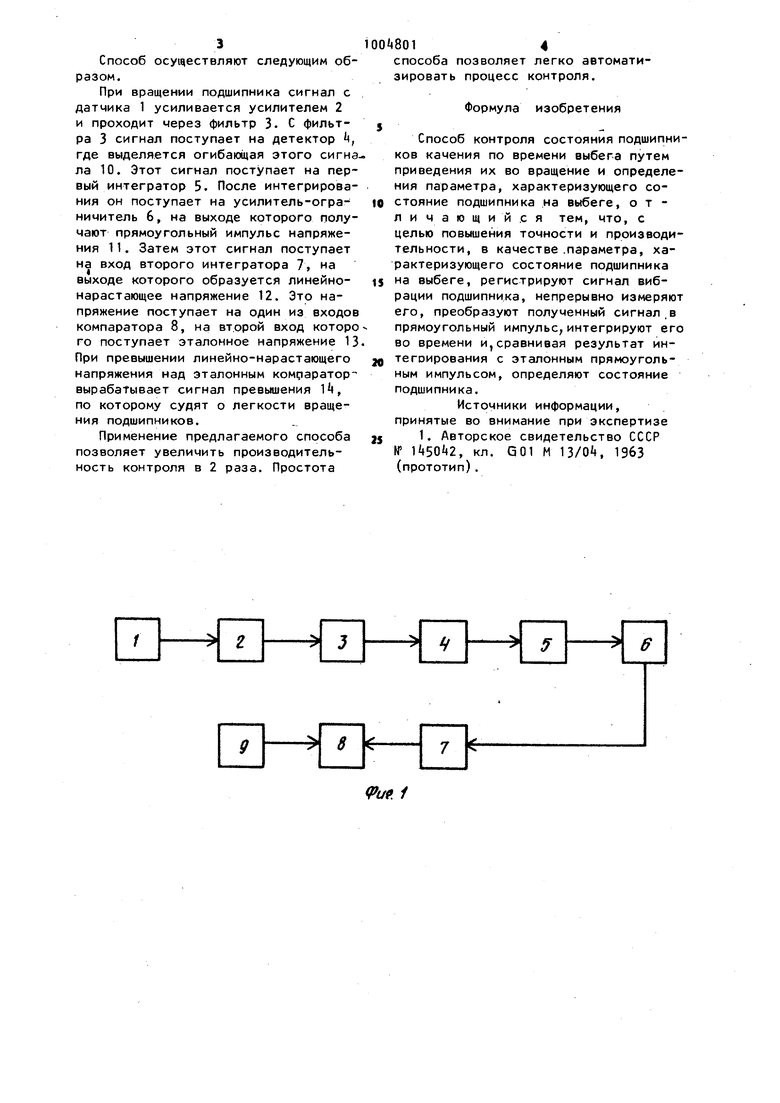
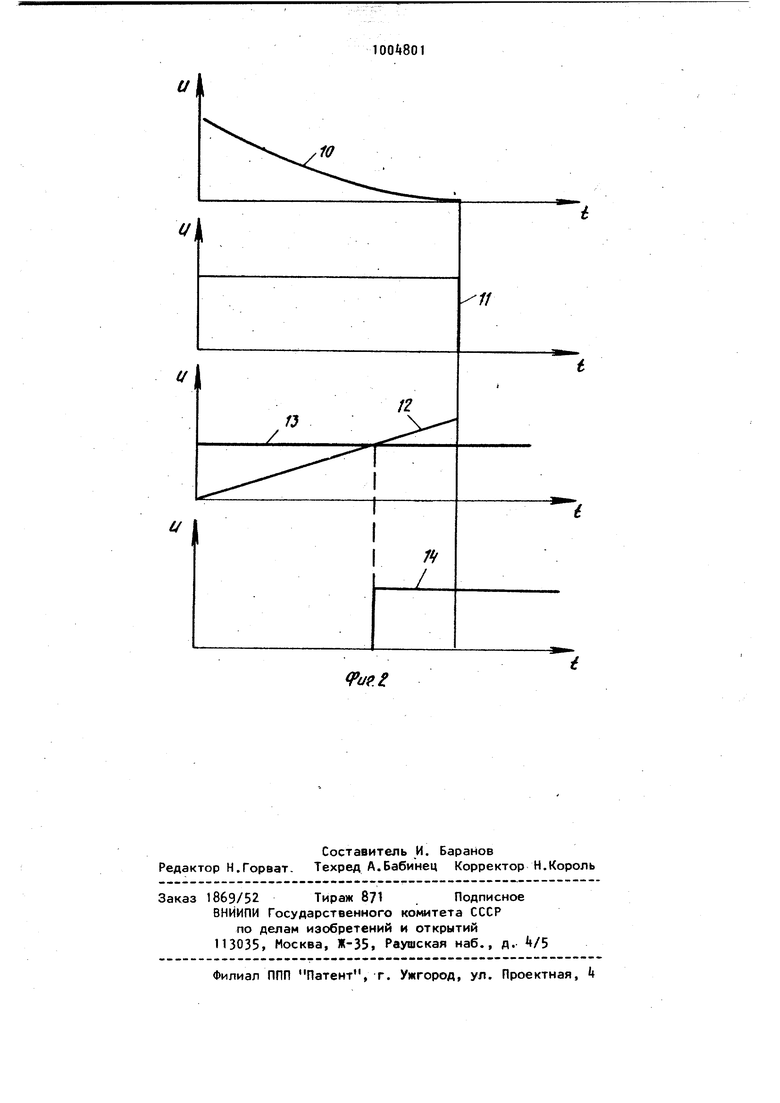
На фиг. 1 показано устройство для осуществления способа, блок-схема; на фиг. 2 - временные характеристики подшипника на выбеге.
Устройство для реализации предложенного способа состоит из последовательно соединенных рибродатчика 1, усилителя 2, фильтра 3, детектора k, первого интегратора 5, усилителя-ограничителя 6, второго интегратора 7 компаратора 8. Второй вход компаратора 8 соединен с выходом эталонного источника 9.
Способ осу1чествляют следующим образом.
При вращении подшипника сигнал с датчика 1 усиливается усилителем 2 и проходит через фильтр 3. С фильтра 3 сигнал поступает на детектор , где выделяется огибающая этого сигнэ. ла 10. Этот сигнал поступает на первый интегратор 5. После интегрирования он поступает на усилитель-ограничитель 6, на выходе которого получают прямоугольный импульс напряжения 11. Затем этот сигнал поступает на вход второго интегратора 7, на выходе которого образуется линейнонарастающее напряжение 12. Это напряжение поступает на один из входов компаратора 8, на второй вход которо го поступает эталонное напряжение 13 При превышении линейно-нарастающего напряжения над эталонным компаратор вырабатывает сигнал превышения , по которому судят о легкости вращения подшипников.
Применение предлагаемого способа позволяет увеличить производительность контроля в 2 раза. Простота
00 48014
способа позволяет легко автоматизировать процесс контроля.
Формула изобретения
5Способ контроля состояния подшипников качения по времени выбега путем приведения их во вращение и определения параметра, характеризующего со10 стояние подшипника на выбеге, отличающийся тем, что, с целью повышения точности и производительности, в качестве .параметра, характеризующего состояние подшипника
15 на выбеге, регистрируют сигнал вибрации подшипннка, непрерывно измеряют его, преобразуют полученный сигнал.в прямоугольный импульс, интегрируют его во времени и,сравнивая результат ин20 тегоирования с эталонным прямоугольным импульсом, определяют состояние подшипника.
Источники информации, принятые во внимание при экспертизе
JJ 1. Авторское свидетельство СССР № Й5042, кл. Q01 М 13/04, 1963 (прототип).
t/f. 1
/J
/
//
I /4
fPiJ.
