Изобретение относится к области измерительной техники и преимущественно может быть использовано для контроля подшипников в узлах в процессе эксплуатации и ремонта машин и механизмов.
Известны устройства, в которых кольца контролируемого устройства - подшипника включают в электрическую цепь, состоящую из последовательно соединенных источника электрического напряжения, формирователя импульсов и токосъемника.
Устройства также содержат привод, вал которого выполнен с возможностью установки одного из колец контролируемого подшипника, и элемент дискретного счета, подключенный к входу формирователя импульсов. При этом состояние подшипника оценивают, например, по величине нормированного интегрального времени контактирования деталей подшипника [1]
Известные устройства позволяют получить усредненную комплексную оценку качества подшипника, однако не обеспечивают выявление на рабочих поверхностях деталей локальных дефектов типа трещин, риск и т.п. свидетельствующих о неработоспособности подшипника.
Наиболее близким к изобретению по технической сущности является устройство, содержащее механизм постоянного радиального нагружения, два привода, валы которых выполнены с возможностью крепления и вращения колец контролируемого подшипника, последовательно соединенные первый токосъемник, источник электрического напряжения, формирователь импульсов и второй токосъемник, подключенные ко выходу формирователя импульсов интегратор и элемент дискретного счета, а также дифференциальный усилитель, к одному входу которого подключен выход интегратора, к другому входу компенсатор напряжения, а к выходу первый вход двухкоординатного регистрирующего устройства, к второму входу которого подключен выход преобразователя углового положения вала, при этом токосъемники подключены к валам привода, а преобразователь углового положения вала входом кинематиически связан с валом привода контролируемого кольца [2]
За счет постоянной по величине и направлению радиальной силы, создаваемой механизмом постоянного радиального нагружения, в подшипнике образуется зона нагружения, ограничения угловым сектором, расположенным симметрично линии действия нагрузки. Поскольку разрушения смазочной пленки вследствие дефектов на рабочих поверхностях деталей подшипника происходят в нагруженных зонах контактов, значение измеренного между кольцами подшипника диагностического параметра, в качестве которого используется нормированное интегральное время контактирования деталей, определяется качеством участков поверхностей, попадающих за время его измерения в зону нагружения. При работе известного устройства приводы вращают оба кольца подшипника, причем одно из колец вращают с высокой частотой, а другое /контролируемое/ с частотой на два-три порядка меньшей.
Таким образом, за время каждого измерения, каждая точка дорожки качения быстровращающегося кольца и каждое тело качения будут находиться под нагрузкой, при этом нагрузку будет воспринимать лишь участок дорожки качения контролируемого кольца, размеры которого превышают размеры зоны нагружения на величину угла поворота кольца за время измерения параметра. При последующих измерениях вследствие медленного поворота контролируемого кольца относительно постоянной радиальной нагрузки положение зоны нагружения перемещается по дорожке качения и контролю подвергаются ее новые участки.
Таким образом, сигнал на первом входе двухкоординатного регистрирующего устройства в функции от угла поворота контролируемого кольца /сигнал с преобразователя углового положения вала поступает на второй вход двухкоординатного регистрирующего устройства/ характеризует качество дорожки качения этого кольца.
Известное устройство наряду с усредненной комплексной оценкой качества подшипника позволяет выявлять отдельные локальные дефекты на дорожках качения колец, однако функциональные возможности устройства ограничены, поскольку его работа предполагает обязательное вращение обоих колец контролируемого подшипника, что делает невозможным проведение с помощью этого устройства контроля дорожек качения колец подшипника непосредственно в сборочном узле, когда одно из колец вращается с рабочей частотой, а другое неподвижно установлено в корпусе. Производительность контроля значительно снижается из-за необходимости демонтажа подшипника.
Изобретение решает задачу расширения функциональных возможностей за счет поиска локальных дефектов дорожек качения колец подшипника в сборочном узле.
Это достигается тем, что известное устройство, содержащее привод и связанный с ним преобразователь углового положения вала, последовательно соединенные первый токосъемник, источник электрического напряжения, формирователь импульсов и второй токосъемник, подключенные к выходу формирователя импульсов интегратор и элемент дискретного счета, а также дифференциальный усилитель, к одному входу которого подключен выход интегратора, к другому входу компенсатор напряжения, а к выходу первый вход двухкоординатного регистрирующего устройства, согласно изобретению дополнительно снабжено устройством циркуляционного радиального нагружения подшипника, связанным с ним преобразователем углового положения вектора нагрузки, преобразователем разности фаз и переключателем режимов, выход которого подключен ко второму входу двухкоординатного регистрирующего устройства, один из входов связан с выходом преобразователя углового положения вектора нагрузки, а другой вход связан с выходом преобразователя разности фаз, входами подключенного к выходам преобразователей углового положения вала и углового положения вектора нагрузки. Токосъемники выполнены с возможностью электрического контактирования с кольцами контролируемого в узле подшипника, вал привода с возможностью кинематической связи с вращающимся кольцом подшипника, а устройство циркуляционного радиального нагружения подшипника выполнено в виде четырех идентичных электромагнитов постоянного тока, создающих радиальные усилия по взаимно перпендикулярным диаметральным осям в плоскости, перпендикулярной оси подшипника, при этом управляющие электромагнитами сигналы Ji имеют вид:
Ii= I(1+sin(ωt+0,5πi)],
где: i порядковый номер электромагнита;
I амплитудное значение тока, определяемое требуемым значением радиальной нагрузки;
ω требуемая частота циркуляции нагрузки;
t текущее время.
На фиг. 1 представлена схема устройства для контроля состояния подшипников качения; на фиг. 2 схема устройства циркуляционного радиального нагружения подшипника; на фиг. 3 пример преобразователя положения вектора нагрузки; на фиг. 4 временные диаграммы, поясняющие работу преобразователя положения вектора нагрузки; на фиг. 5 пример преобразователя разности фаз; на фиг. 6 временные диаграммы, поясняющие работу преобразователя разности фаз; на фиг. 7 результаты контроля подшипника предложенным устройством.
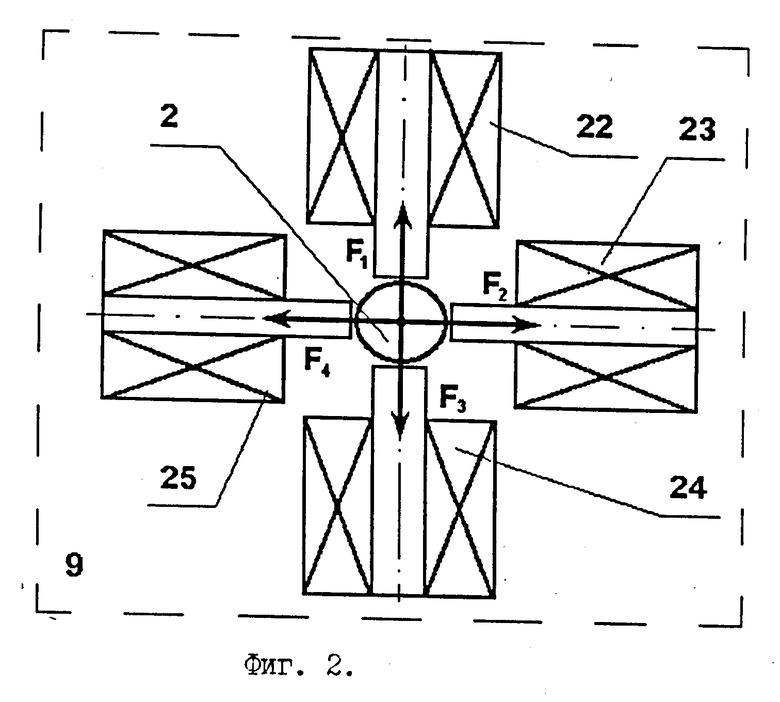
Внутреннее кольцо контролируемого подшипника 1 /фиг. 1/ установлено на валу 2 сборочного узла. Один из полюсов источника 3 электрического напряжения с помощью токосъемника 4 через формирователь 5 импульсов связан с неподвижно зафиксированным в корпусе узла наружным кольцом подшипника 1, второй полюс источника 3 электрического напряжения через токосъемник 6 и вал 2 электрически связан с внутренним кольцом подшипника 1. Вал привода 7 кинетически связан через вал 2 сборочного узла с вращающимся внутренним кольцом контролируемого подшипника, например, посредством соединительной муфты 8. Устройство 9 циркуляционного радиального нагружения подшипника кинематически связано через вал 2 с контролируемым подшипником сборочного узла и электрически с преобразователем 10 углового положения вектора радиальной нагрузки. К выходу формирователя 5 импульсов подключены интегратор 11 и элемент 12 дискретного счета. Первый вход дифференциального усилителя 13 соединен с выходом интегратора 11, а второй вход с выходом компенсатора 14 напряжения. К первому входу двухкоординатного регистрирующего устройства 15 подключен выход дифференциального усилителя 13, а ко второму входу выход переключателя 16 режимов, соединенного первым входом с выходом преобразователя 17 разности фаз, а вторым входом с выходом преобразователя 10 углового положения вектора нагрузки. Выход преобразователя 18 углового положения вала, связанного входом с приводом 7, подключен к первому входу преобразователя 17 разности фаз, ко второму входу которого подключен выход преобразователя 10 углового положения вектора нагрузки. Элемент 12 дискретного счета может состоять, например, из временного селектора 19, одним входом подключенного к формирователю 5 импульсов, вторым входом к генератору 20 опорной частоты, а выходом к счетчику 21 импульсов. Устройство 9 циркуляционного радиального нагружения подшипника состоит из четырех идентичных электромагнитов 22-25 постоянного тока /фиг. 2/, причем взаимно перпендикулярные линии действия сил электромагнитов 22 25 постоянного тока перпендикулярны также и оси подшипника 1.
Устройство работает следующим образом.
Привод 7 посредством муфты 8 вращает вал 2 сборочного узла и связанное с ним внутреннее кольцо подшипника 1 со скоростью, обеспечивающей образование гидродинамической смазочной пленки между деталями подшипника 1. Напряжение от источника 3 электрического напряжения через токосъемник 6 и вал 2 подводится к внутреннему кольцу, а через формирователь 5 импульсов и токосъемник 4 к наружному кольцу. При разрушении смазочной пленки в контактных зонах подшипника 1 электрическое сопротивление между его кольцами резко уменьшается, а ток через формирователь 5 импульсов увеличивается. Формирователь 5 импульсов представляет собой токовое пороговое устройство. При превышении порогового значения тока во входной цепи на выходе формирователя 5 импульсов появляется высокое напряжение Uф, а при токе, меньшем порогового значения, на выходе присутствует нулевой сигнал. Таким образом, при разрушении смазочной пленки в подшипнике 1 на выходе формирователя 5 возникает импульс напряжения прямоугольной формы, длительность которого равна времени разрушения пленки. Отдельные импульсы интегрируются интегратором 11, и на его выходе формируется напряжение U:
где
Uф(t) текущее значение напряжения на выходе формирователя 5 импульсов:
Tn постоянная интегрирования.
Т.к. выходные сигналы формирователя импульсов имеют одинаковую амплитуду Uф и одинаковую форму, то выражение для U примет вид:
где ti длительность i-го импульса;
n число импульсов за время Tи;
K нормированное интегральное время контактирования деталей подшипника.
Следовательно, напряжение на выходе интегратора 11 пропорционально значению нормированного интегрального времени контактирования деталей подшипника. В качестве интегратора 11 может быть использована, например, интегрирующая RC-цепь.
Устройство 9 циркуляционного радиального нагружения подшипника создает радиальную нагрузку, воспринимаемую последовательно всеми точками дорожки качения контролируемого кольца. Такой характер нагружения получается при вращении вектора радиальной нагрузки относительно контролируемого кольца. При этом нагрузку от одного кольца к другому передают несколько тел качения. В испытуемом подшипнике образуется зона нагружения в виде углового сектора, расположенного симметрично линии действия нагрузки, минимальная ширина которого равна ± 2π/L от направления действия радиальной силы, где Z число тел качения.
Устройство 9 циркуляционного радиального нагружения подшипника /фиг. 2/ реализовано в виде четырех идентичных электромагнитов 22 25 постоянного тока, расположенных в плоскости, перпендикулярной оси подшипника 1, причем линии действия сил электромагнитов взаимноперпендикулярны и проходят через ось подшипника 1.
Управляющие сигналы имеют вид:
Ii= I(1+sin(ωt+0,5πi)].
Модуль вектора нагрузки Fi электромагнита постоянного тока пропорционален квадрату тока Ii в его обмотке. Математический анализ показывает, что при выбранном виде управляющих сигналов значение модуля вектора суммарной от действия электромагнитов 22 25 постоянного тока нагрузки
F [/F1 F3/2 + /F3 - F4/2]0,5
является постоянным, а фаза вектора суммарной нагрузки совпадает с фазой управляющего сигнала электромагнита 22 /i 1/.
При контроле неподвижного наружного кольца угловая скорость вращения вектора нагрузки выбирается много меньше скорости вращения вала 2 и закрепленного на нем внутреннего кольца подшипника 1 /фиг. 1/. Для проведения измерений диагностического параметра переключатель 16 режимов подключает к второму входу регистрирующего устройства 15 выход преобразователя 10 углового положения вектора нагрузки. Преобразователь 10 углового положения вектора нагрузки формирует на выходе электрическое напряжение, пропорциональное аргументу вектора радиальной нагрузки относительно неподвижного кольца.
При контроле вращающегося кольца угловая скорость ω вращения вектора нагрузки выбирается близкой к скорости вращения контролируемого кольца wв Для проведения измерений диагностического параметра переключатель 16 режимов подключает к второму входу двухкоординатного регистрирующего устройства 15 выход преобразователя 17 разности фаз, который формирует на выходе электрическое напряжение, пропорциональное разности угла поворота вращающегося кольца и аргумента вектора радиальной нагрузки относительно неподвижного наружного кольца, при этом на второй вход двухкоординатного регистрирующего устройства поступает напряжение, фактически пропорциональное углу поворота радиальной нагрузки относительно контролируемого вращающегося кольца.
Таким образом, при контроле одного из колец подшипника 1 вектор радиальной нагрузки, создаваемой устройством 9 циркуляционного радиального нагружения подшипника, медленно поворачивается относительно контролируемого кольца, создавая на его рабочей поверхности контролируемую зону нагружения в виде углового сектора, расположенного симметрично линии действия нагрузки. Вращение вектора нагрузки приводит к медленному перемещению нагруженной зоны контроля по всей дорожке качения контролируемого кольца, и все точки поверхности последовательно попадают в эту зону. При попадании в зону нагружения дефектного участка /царапина, трещина, выкрашивание, лунка, коррозионное растрескивание и т. п./ частота и длительность разрушений смазочной пленки резко увеличиваются, причем вероятность разрушения с увеличением нагрузки также возрастает. Следствием описанных процессов является повышение выходного напряжения интегратора 11 с максимумом, соответствующим расположению дефектного участка на линии действия радиальной нагрузки. Напряжение имеет две составляющие: постоянную и переменную.
Вектор радиальной нагрузки медленно поворачивается относительно контролируемого кольца, следовательно, быстро вращается относительно другого кольца и сепаратора. За время измерения все токи неконтролируемого кольца и все тела качения многократно будут попадать под нагрузку, следовательно, влияние качества рабочих поверхностей этих деталей на результат измерения диагностического параметра будет усредняться за время измерения и будет формировать постоянную составляющую результата измерения, являющуюся комплексной оценкой1 состояния рабочих поверхностей деталей подшипника 1. Изменение же выходного напряжения интегратора 11 в функции угла поворота вектора радиальной нагрузки относительно контролируемого кольца определяется переменной cоставляющей, которая однозначно характеризуется качеством дорожки качения контролируемого кольца.
В качестве двухкоординатного регистрирующего устройства 15 может использоваться, например, электронно-лучевая трубка. При этом сигнал с усилителя 13 поступает на вертикальные пластины, а с преобразователя 10 углового положения вектора нагрузки /при контроле неподвижного наружного кольца/ или с преобразователя 17 разности фаз /при контроле вращающегося внутреннего кольца/ на горизонтальные пластины электронно-лучевой трубки. Горизонтальное отклонение луча пропорционально углу поворота вектора радиальной нагрeзки относительно контролируемого кольца, а вертикальное - значению нормированного интегрального времени контактирования деталей подшипника.
Компенсатор 14 представляет собой калиброванный регулируемый источник напряжения и служит для компенсации постоянной составляющей сигнала с выхода интегратора 11. Компенсатор подключен ко второму входу дифференциального усилителя 13, который может быть выполнен, например, на операционном усилителе. Изменением значения напряжения компенсации добиваются равенства нулю наименьшего вертикального отклонения луча электронно-лучевой трубки. При этом значение напряжения компенсации характеризует качество рабочих поверхностей неконтролируемых деталей подшипника 1, а вертикальное отклонение луча трубки в функции от угла поворота вектора радиальной нагрузки относительно контролируемого кольца определяется только качеством его дорожки качения.
Для комплексной оценки качества рабочих поверхностей деталей подшипника и для калибровки компенсатора 14 напряжения служит элемент 12 дискретного счета. Импульсы напряжения с формирователя 5 импульсов поступают на первый вход временного селектора 19, на второй вход которого подаются высокочастотные импульсы от генератора 20 опорной частоты. Временной селектор 19 выполняет функцию логического умножения, поэтому на его выходе присутствуют импульсы генератора 20 опорной частоты только тогда, когда на первом входе временного селектора 19 есть напряжение с выхода формирователя 5 импульсов, т. е. в момент разрушения смазочной пленки. Счетчик 21, в качестве которого может использоваться, например, частотомер Ч3 34А, определяет суммарное число импульсов за время измерения Т, равное периоду вращения вектора нагрузки относительно контролируемого кольца. Поскольку период Т и период Тг генератора 20 опорной частоты есть величины постоянные, то исзмеренное число N импульсов пропорционально нормированному интегральному времени контактирования деталей подшипника К:
К NТг/Т
Для калибровки компенсатора 14 напряжения при контроле образцового подшипника изменением значения напряжения компенсации добиваются отсутствия вертикального отклонения луча электронно-лучевой трубки. Значение К, соответствующее этому напряжению, фиксируют по показаниям элемента 12 дискретного счета.
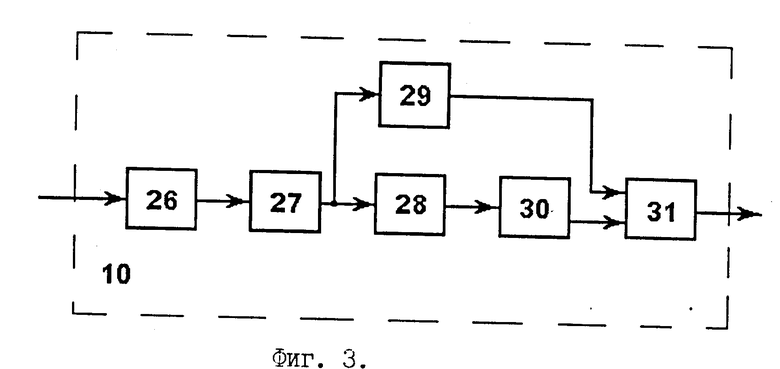
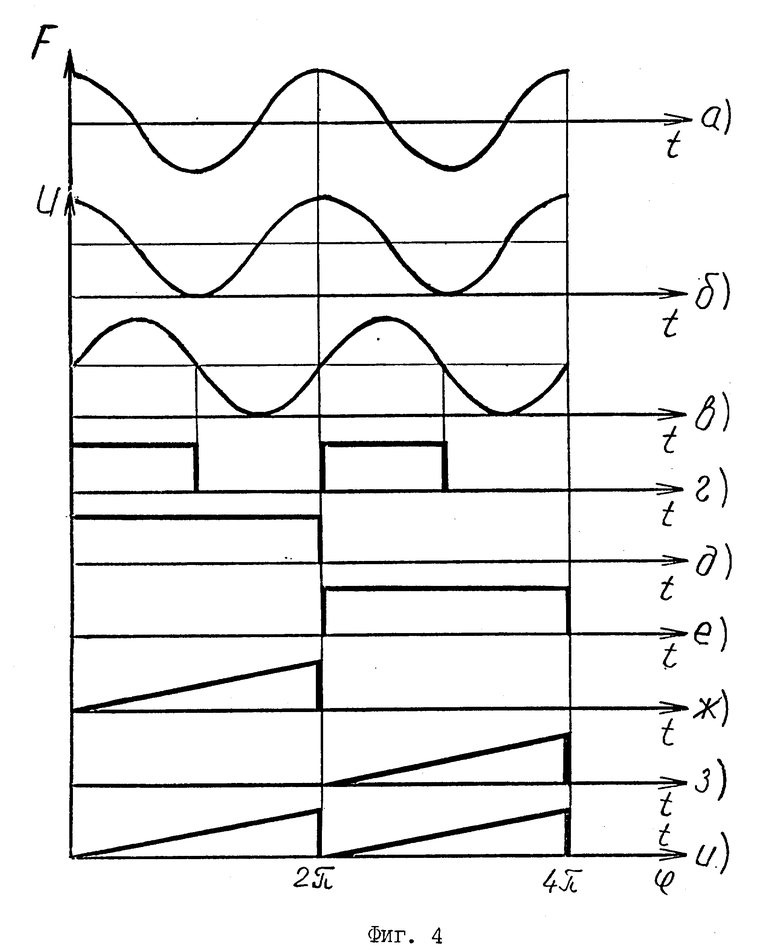
Преобразователь 10 углового положения вектора радиальной нагрузки /фиг. 3/ может состоять, например из компаратора 26, подключенного к его выходу триггера 27, инвертора 28, двух интеграторов 29 и 30, вход первого из которых непосредственно соединен с выходом триггера 27, а вход второго через инвертор 28. Выходы интеграторов 29 и 30 подключены к входам сумматора 31. Аргумент вектора нагрузки /фиг. 4а/ совпадает с фазой управляющего сигнала для первого электромагнита /фиг. 4б/, фаза второго магнита сдвинута на четверть периода. Сигнал, управляющий вторым электромагнитом /фиг. 4в/, подается на вход компаратора 26, настроенного на среднее значение управляющего тока. Период импульсов на выходе компаратора 26 /фиг. 4г/ и длительность импульсов на выходе триггера 27 /фиг. 4д/ равны периоду вращения нагрузки. Инвертор 28 инвертирует сигнал, поступающий с выхода триггера 27 /фиг. 4е/. На выходе интеграторов 29 и 30 формируются импульсы пилообразной формы /фиг. 4ж, з/. После суммирования сумматором 31 на его выходе образуется сигнал пилообразной формы /фиг. 4и/, причем вследствие равномерного вращения вектора радиальной нагрузки синфазно с сигналом, управляющим первым электромагнитом, можно утверждать, что амплитуда этого сигнала пропорциональна углу поворота вектора радиальной нагрузки относительно неподвижного кольца. В качестве интеграторов 29 и 30 могут быть использованы, например, интеграторы на операционных усилителях со сбросом.
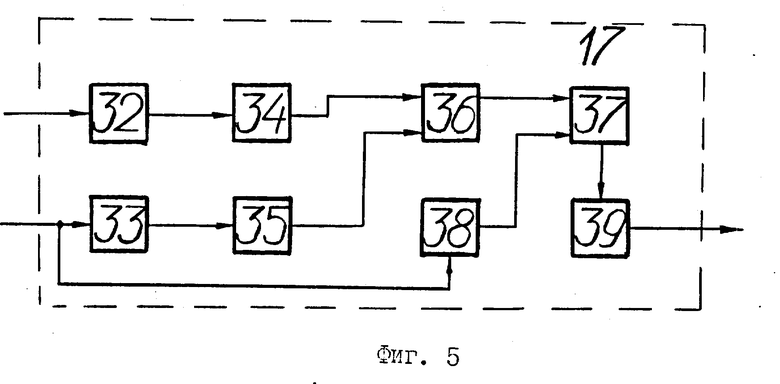
Преобразователь 17 разности фаз /фиг. 5/ выполняет преобразование разности угла поворота вращающегося кольца и аргумента радиальной нагрузки относительно неподвижного кольца в напряжение и может состоять, например, из двух компараторов 32 и 33, входами соединенных соответственно с выходами преобразователя 10 углового положения вектора нагрузки и преобразователя 18 углового положения вала, а выходами соответственно, со счетчиками 34 и 35. Выходы счетчиков подключены к входам универсального цифрового компаратора 36, выход которого соединен с первым входом формирователя 37 импульсов, второй вход которого соединен с выходом одновибратора 38, входом подключенного к выходу преобразователя 18 углового положения вала. Выход формирователя 37 импульсов соединен с управляющим входом генератора 39 линейно изменяющегося напряжения.
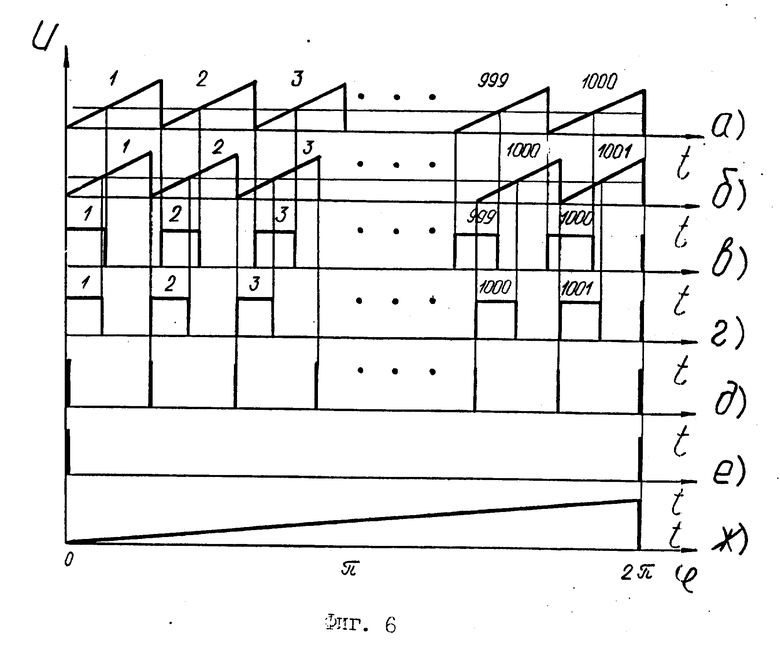
На вход компаратора 32 поступает пилообразный сигнал с выхода преобразователя 10 углового положения вектора нагрузки /фиг. 6а, где пример приведен для частоты вращения вала 1001 мин-1 и частоты вращения нагрузки 1000 мин-1/, а на вход компаратора 33 пилообразный сигнал с выхода преобразователя 18 углового положения вала, в качестве которого может быть использован, например потенциометр. Последний формирует на своем выходе напряжение, пропорциональное углу поворота вала /фиг. 6б/. Компараторы 32 и 33 настроены на средние значения напряжений, подаваемых на их входы, поэтому на их инверсных выходах формируются сигналы прямоугольной формы, частоты которых соответствуют частотам вращения вектора нагрузки и вала /фиг. 6в, г/. Эти импульсы считаются счетчиками 34 и 35. Для приведенного на диаграммах примера внутреннее кольцо, вращаясь с опережением, будет периодически обгонять вектор нагрузки на один оборот за минуту, результатом чего является периодическое рассогласование кодов на выходе счетчиков 34 и 35. В моменты рассогласования кодов на выходе цифрового компаратора 36 появляются импульсы с амплитудой, соответствующей логической единице. Для получения результата сравнения кодов на выходах счетчиков 34 и 35 в нужный момент, а именно, когда вращающееся кольцо каждый раз совершает полный оборот относительно неподвижного кольца, используется формирователь 37 импульсов, выполняющий функцию 2И, на первый вход которого поступают импульсы с выхода цифрового компаратора 36, а на второй вход импульсы, формируемые одновибратором 38 /фиг. 6д/ по задним фронтам пилообразных импульсов с выхода преобразователя 18 углового положения вала /фиг. 6а/. Таким образом, при наличии логической единицы на входе формирователя 37 импульсов с выхода цифрового компаратора 36, свидетельствующей о том, что в этот же момент времени на выходах счетчиков 34 и 35 наблюдается рассогласование кодов, т.е. вектор нагрузки совершил полный оборот относительно вращающегося кольца, с другой стороны, на выходе формирователя 37 импульсов появляется сигнал с амплитудой логической единицы /фиг. 6е/. Очевидно, что период последних импульсов равен периоду вращения вектора нагрузки относительно вращающегося кольца. Первый после запуска устройства импульс с выхода формирователя 37 импульсов запуск генератора 39 линейно изменяющегося напряжения, что соответствует началу первого измерительного цикла. Следующий /второй/ импульс формирователя 37 импульсов производит повторный запуск генератора 39 линейно изменяющегося напряжения, что соответствует концу первого измерительного цикла и началу второго. Длительность измерительного цикла равна периоду следования импульсов с выхода формирователя 37 импульсов, а, следовательно, равна периоду вращения вектора нагрузки относительно вращающегося кольца. Сигнал на выходе генератора 39 линейно изменяющегося напряжения /фиг. 6ж/, изменяясь линейно во время, в каждый момент пропорционален разности угла поворота вращающегося кольца и аргумента вектора радиальной нагрузки относительно неподвижного кольца, т.е. пропорционален углу поворота нагрузки относительно вращающегося кольца. В качестве компаратора 32 и 33 могут использоваться, например, интегральные микросхемы К554 СА2, в качестве счетчиков 34 и 35 микросхемы типа К555 ИЕ6, в качестве одновибратора микросхема К155 АГ1, в качестве генератора 39 линейно изменяющегося напряжения интегратор со сбросом, на вход которого поступает постоянное напряжение, а на второй /управляющий/ вход сигнал с формирователя 37 импульсов.
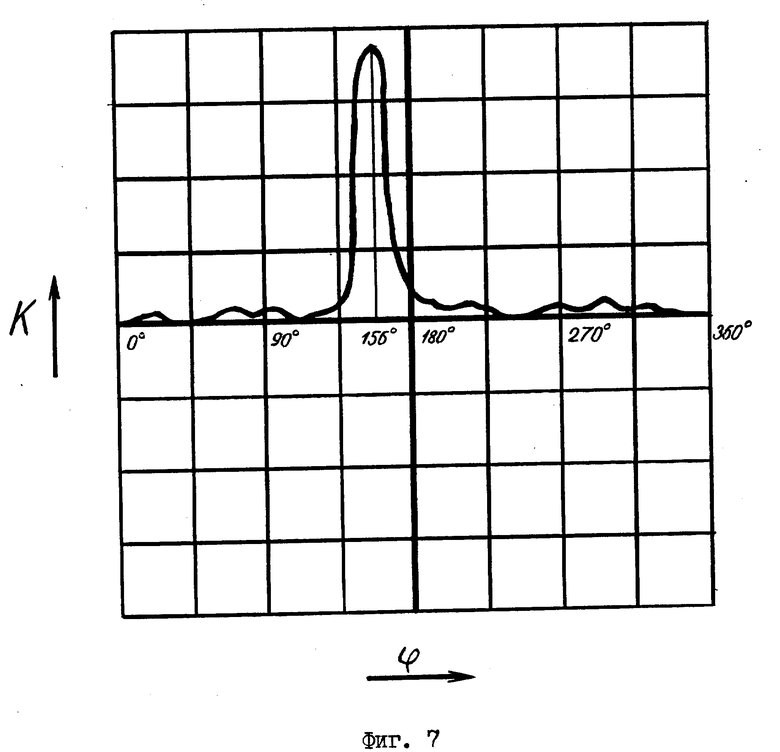
Пример. Контролировалось наружное кольцо бывшего в эксплуатации шарикоподшипника типа 7000108 /ГОСТ 8338-75/ при следующих режимах: частота вращения вала с внутренним кольцом 1000 мин-1, частота вращения нагрузки 1 мин-1, модуль вектора радиальной нагрузки 200Н, смазка - 50% масла МС-20 и 50% трансформаторного масла; наружное кольцо неподвижно фиксировалось в корпусе сборочного узла. Кривая, полученная на экране электронно-лучевой трубки, представлена на фиг. 7. Напряжение компенсации при этом соответствовало значению нормированного интегрального времени - 3,5•10-5. Полученная на предложенном устройстве кривая указывает на наличие локального дефекта на рабочей поверхности наружного кольца с угловой координатой Φ 156o от линии действия нагрузки 1-го электромагнитного по направлению вращения вектора нагрузки; значение диагностического параметра в этой точке -37•10-5.
После контроля подшипник был разобран, и с помощью микроскопа исследовались рабочие поверхности деталей. На дорожке качения наружного кольца в предполагаемом месте была обнаружена поперечная трещина с раскрытием 0,3 мм. На поверхностях других деталей недопустимые дефекты обнаружены не были.
Таким образом, предложенное устройство выгодно отличается от прототипа более широкими функциональными возможностями. Оно позволяет проводить контроль состояния дорожек качения подшипника непосредственно в сборочном узле без его демонтажа, что существенно повышает производительность контрольных операций. Устройство осуществляет как комплексную оценку состояния рабочих поверхностей всех деталей установленного в узел подшипника, так и поиск дефектов дорожек качения обоих колец с определением их местоположения.
Использование: в области измерительной технике преимущественно для контроля подшипников в узлах в процессе эксплуатации и ремонта машин и механизмов. Сущность изобретения: устройство для контроля состояния подшипников качения содержит привод и связанный с ним преобразователь углового положения вала, последовательно соединенные первый токосъемник, источник электрического напряжения, формирователь импульсов и второй токосъемник, подключенные к выходу формирователя импульсов интегратора и элемент дискретного счета, а также дифференциальный усилитель, к одному входу которого подключен выход интегратора, к другому входу подключен компенсатор напряжения, а к выходу - первый вход двухкоординатного регистрирующего устройства. Устройство снабжено устройством циркуляционного радиального нагружения подшипника, связанным с ним преобразователем углового положения вектора нагрузки, преобразователем разности фаз и переключателем режимов, выход которого подключен ко второму входу двухкоординатного регистрирующего устройства, один из входов связан с выходом преобразователя углового положения вектора нагрузки, и другой вход связан с выходом преобразователя разности фаз, входами подключенного к выходам преобразователей углового положения вала и углового положения вектора нагрузки. Токосъемники выполнены с возможностью электрического контактирования с кольцами контролируемого в узле подшипника, а вал привода с возможностью кинематической связи с вращающимся кольцом подшипника. Устройство циркуляционного радиального нагружения подшипника выполнено в виде четырех идентичных электромагнитов постоянного тока, создающих радиальные усилия по взаимно перпендикулярным диаметральным осям в плоскости, перпендикулярной оси подшипника. Вид управляющих сигналов определяется по соответствующей формуле. Благодаря этому достигается расширение функциональных возможностей. 1 з.п. ф-лы, 7 ил.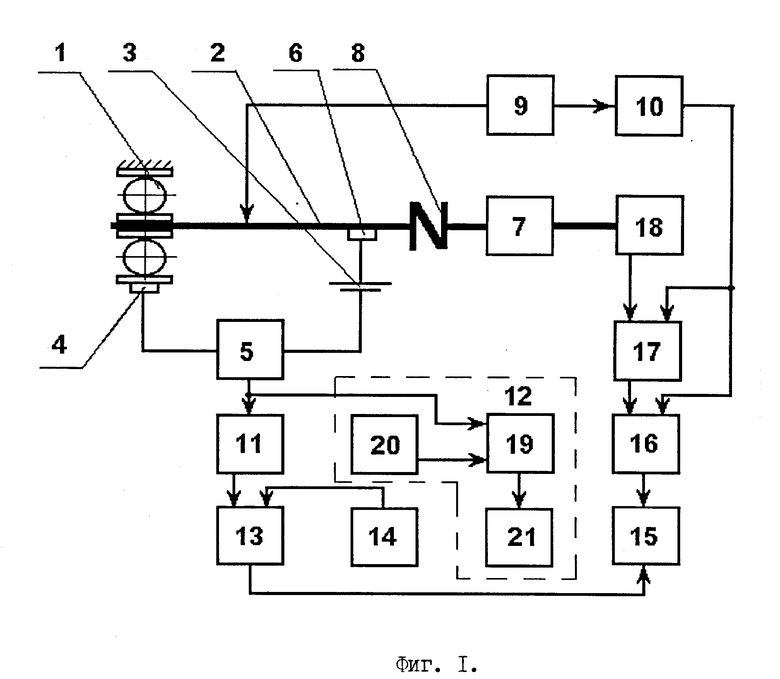
Ii= I(1+sin(ωt+0,5πi)],
где i порядковый номер электромагнита;
Ii ток в обмотке i-го электромагнита;
I амплитудное значение тока, определяемое требуемым значением радиальной нагрузки;
ω - требуемая частота циркуляции нагрузки;
t текущее время.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Авторское свидетельство СССР N 671489, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для контроля состояния подшипников качения | 1984 |
|
SU1164569A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
