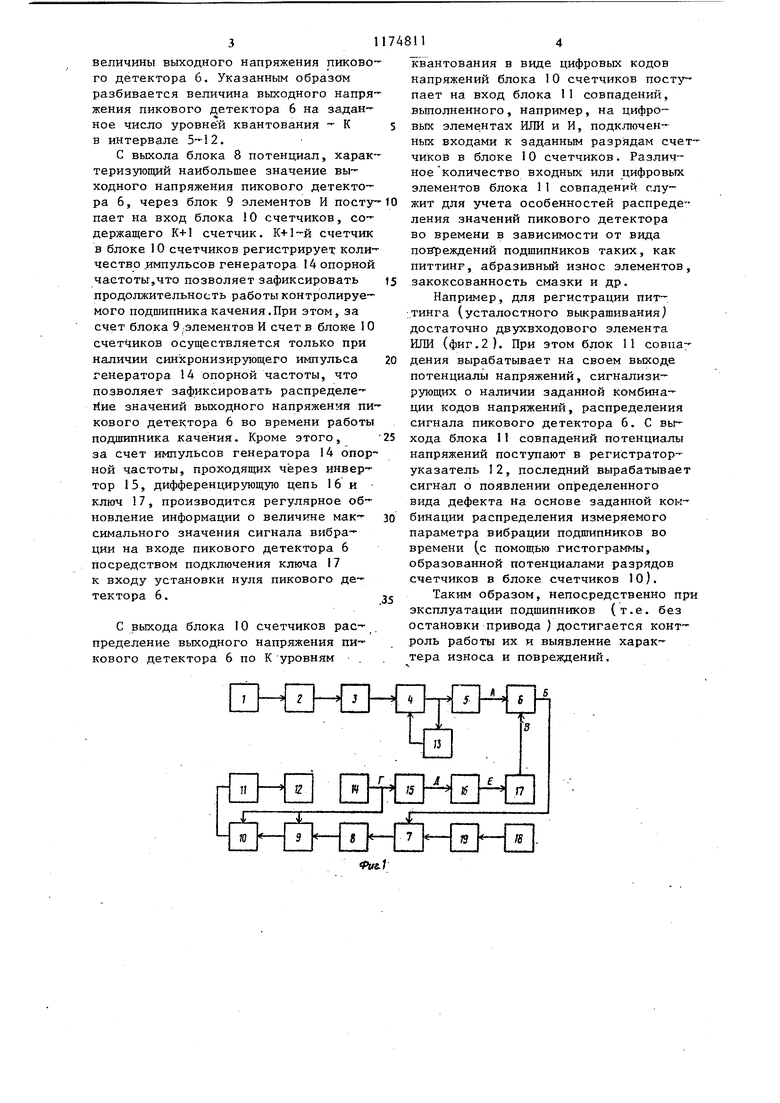
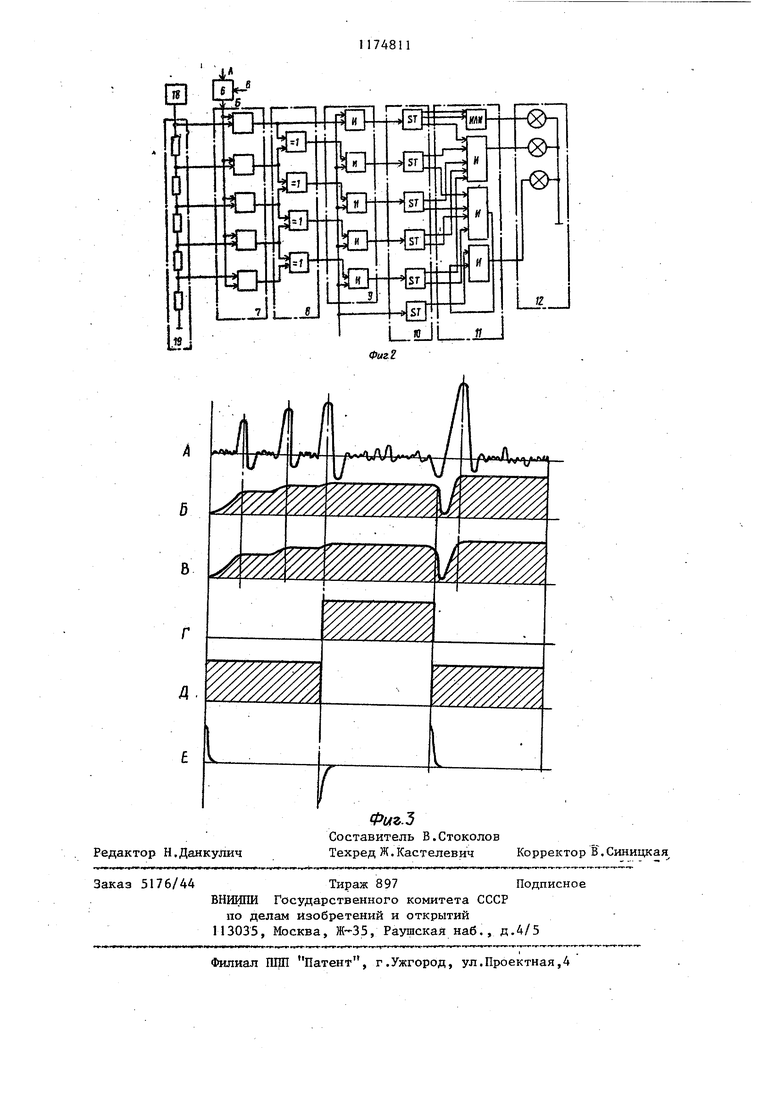
Изобретение относится к машиноустройстйа для контроля состояния узлов и деталей привода машин. Цель изобретения - расширение технических возможностей устройств виб рационной диагностики путем выявления характера неисправности подшипников качения непосредственно во время их эксплуатации, чем достигается улучшение условий обслуживания узлов привода машин и сокращается время,,на их обслуживание и ремонт На фиг,1 изображена структурная схема устройства; на фиг.2 - пример coединения цифровых элементов в состав устройства; на фиг.З - временные диа раммы напряжений, поясняющие работу устройства. Устройство (фиг.1) содержит после довательно-соединенные вибродатчик усилитель 2, блок 3 автонормирования частотный фильтр 4 (управляемый напряжением ), блок 5 формирования амплитудно-частотной характеристики, пиковьй детектор 6, блок 7 компараторов , блок-8 элементов ИСКЛЮЧАЮЩЕЕ ИЛИ, блок 9 элементов И, блок 10 счетчиков и блок 11 совпадения, а также регистратор-указатель 12. Детектор 13 среднего (абсолютного )зна чения включен между выходом частотного фильтра и управляющим входом последнего. Генератор 14 опорной час тоты через инвертор 15, дифференциру ющую цепь 16 и ключ 17 соединен с входом установки нуля пикового детектора 6. Выход генератора 14 опорной частоты соединен с вторыми входами блока 9 элементов И и блока 10 счетчиков, а выход источника 18 опор ного напряжения через резистивную матрицу 19 соединен с вторым входом блока 7 компараторов. Блок 3 автонормирования может быть выполнен в виде усилителя с системой автоматической регулировки усиления (АРУ). Блок 5формирования амплитудно-час тотной характеристики выполнен в ви де инвертирующего усилителя с отрицательной обратной связью и изменя емым коэффициентом передачи по напря жению в зависимости от частоты. Устройство работает следующим образом. Электрический сигнал вибродатчика 1, закрепленного на корпусе конт111 ролируемого подшипника, усиливается усилителем 2, нормируется в блоке 3 по величине среднего абсолютного (или среднего квадратического)значения и поступает на вход частотного фильтра 4 (управляемого напряжением), который подавляет низкие частотные составляющие сигнала вибрации в зависимости от величины вьгходного напряжения детектора 13 среднего значения. Выходное напряжение детектора 13 снимается с выхода частотного фильтра 4 и поступает на управляющий вход последнего, что автоматически поддерживает среднее абсолютное значение сигнала высших частот вибрации на выходе частотного фильтра 4 около заданого значения. Таким образом, выдерживается необходимая переменная полоса измерительньк частот для контроля состояния подшипников , работаюищх с изменяемыми режимами нагружения и частотами вращения. Далее, ограниченный в области низких частот сигнал вибродатчика I поступает на вход блока 5 формирования амплитудно-частотной характеристики, который производит заданный . подъем высших частот, что необходимо для увеличения объема контролируемых типоразмеров подшипников качения. С выхода блока 5 сигнал вибрации поступает на вход пикового детектора 6, который регистрирует максимальное значение сигнала на его входе. Зафиксированное максимальное значение сигнала с выхода пикового детектора 6 поступает на вход блока 7 компараторов, в котором осуществляется сравнение выходного напряжения пикового детектора с напряжениями, поступающими с выхода резистивной матрицы 19, при этом напряжения на выходе резистив- ной матрицы 19 образуются за счет ис точника 18 опорного напряжения .При превышении напряжения на выходе пикового детектора- 6 величин напряжений на выходе резистивной матрицы 19, блок 7 компараторов вырабатывает потенциалы напряжений, сигнализирующих о количестве превышенных напряжений резистивной матрицы 9 выходным напряжением пикового детектора 6. С выхода блока 7 компараторов потенциалы напряжений подаются на вход блока 8 элементов ИСКЛЮЧАЮЩЕЕ ИЛИ , при этом последний подавляет все входные потенциалы напряжений кроме потенциала, характеризующего наибольшее значение величины выходного напряжения пиково го детектора 6. Указанным образом разбивается величина выходного напря жения пикового детектора 6 на заданное число уровней квантования - К в интервале 5-12. С выхола блока 8 потенциал, харак теризуюпц1й наибольшее значение выходного напряжения пикового детектора 6, через блок 9 элементов И посту пает на вход блока 10 счетчиков, содержащего К+1 счетчик. К+1-и счетчик в блоке 10 счетчиков регистрирует коли чество лмпульсов генератора 14 опорной частоты,что позволяет зафиксировать продолжительность работы контролируемого подшипника качения.При этом, за счет блока 9 ..элементов И счет в блоке 10 счетчиков осуществляется только при наличии синхронизирующего импульса генератора 14 опорной частоты, что позволяет зафиксировать распределейие значений выходного напряжения пи кового детектора 6 во времени работы подшипника качения. Кроме этого, за счет импульсов генератора 14 опор ной частоты, проходящих через инвертор 15, дифференцирующую цепь 16 и ключ 17, производится регулярное обновление информации о величине максимального значения сигнала вибрации на входе пикового детектора 6 посредством подключения ключа 17 к входу установки нуля пикового детектора 6. С выхода блока 10 счетчиков распределение выходного напряжения пикового детектора 6 по К уровням квантования в виде цифровых кодов напряжений блока 10 счетчиков поступает на вход блока 11 совпадений, выполненного, например, на цифровых элементах ИЛИ и И, подключенных входами к заданным разрядам счетчиков в блоке 10 счетчиков. Различное количество входных или цифровых элементов блока 11 совпадений служит для учета особенностей распределения значений пикового детектора во времени в зависимости от вида повреждений подшипников таких, как питтинг, абразивный износ элементов, закоксованность смазки и др. Например, для регистрации питтинга (усталостного выкрашивания) достаточно двухвходового элемента ИЛИ (фиг.2). При этом блок 11 совпадения вырабатывает на своем выходе потенциалы напряжений, сигнализирующих о наличии заданной комбинации кодов напряжений, распределения сигнала пикового детектора 6. С выхода блока 11 совпадений потенциалы напряжений поступают в регистраторуказатель I2, последний вырабатывает сигнал о появлении определенного вида дефекта на основе заданной комбинации распределения измеряемого параметра вибрации подшипников во времени (с помощью гистограммы, образованной потенциалами разрядов счетчиков в блоке счетчиков 10). Таким образом, непосредственно при эксплуатации подшипников (т.е. без остановки привода ) достигается контроль работы их и выявление характера износа и повреждений.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для вибрационной диагностики остаточного ресурса подшипников качения | 1985 |
|
SU1295262A1 |
| Устройство для контроля состояния узлов трения качения | 1987 |
|
SU1423934A1 |
| Устройство для вибрационной диагностики состояния подшипников качения | 1981 |
|
SU987438A1 |
| СЕНСОР ДИАГНОСТИКИ УЗЛОВ ТРЕНИЯ КАЧЕНИЯ | 1992 |
|
RU2036455C1 |
| Устройство для прогнозирования ресурса подшипников качения | 1987 |
|
SU1425507A1 |
| Способ контроля состояния подшипников качения и устройство для его осуществления | 1980 |
|
SU943549A1 |
| Устройство для контроля подшипников качения | 1990 |
|
SU1712807A1 |
| Способ контроля состояния подшипников качения и устройство для его осуществления | 1980 |
|
SU916999A1 |
| СЕНСОР ДЛЯ КОНТРОЛЯ И ДИАГНОСТИКИ СОСТОЯНИЯ ПОДШИПНИКОВ КАЧЕНИЯ | 1992 |
|
RU2036454C1 |
| Устройство для диагностики состояния подшипника качения | 1990 |
|
SU1767377A1 |
УСТРОЙСТВО ДЛЯ ВИБРАЦИОННОЙ ДИАГНОСТИКИ СОСТОЯНИЯ ПОДШИПНИКОВ КАЧЕНИЯ, содержащее последова- . тельно соединенные вибродатчик, усилитель, блок автонормирования, частотный фильтр, блок формирования ам- плитудно-частотной характеристики и пиковый детектор, а также детектор среднего значения сигнала, включенный между выходом и управляющим входом частотного фильтра, блок компара торов и регистратор-указатель, о т личающееся тем, что, с целью расширения его технических возможностей и улучшения условий обслуживания путем выявления и регистрации характера повреждений подшипников качения, оно снабжено последовательно соединенными источником onopriDro. напряжения, резистивной матрицей, блоками элементов ИЛИ, элементов И, счетчиков и совпадения, а также последовательно соединенными генератором опорной частоты, инвертором, дифференцирую.щей цепью и клюi чом, вЫход которого подключен к вхо,ду установки нуля пикового детекто(Л ра, выход которого соединен с первым входом блока компараторов, выход генератора опорной частоты соединен с установочными входами блока счетчиков и блока элементов И, причем выход резистивной матрицы подключен к второму входу блока компараторов,а ч1 выход блока совпадения соединен с вхо4 дом регистратора-указателя. 00
| Устройство для вибрационной диагностики состояния подшипников качения | 1981 |
|
SU987437A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для вибрационной диагностики состояния подшипников качения | 1981 |
|
SU987438A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
