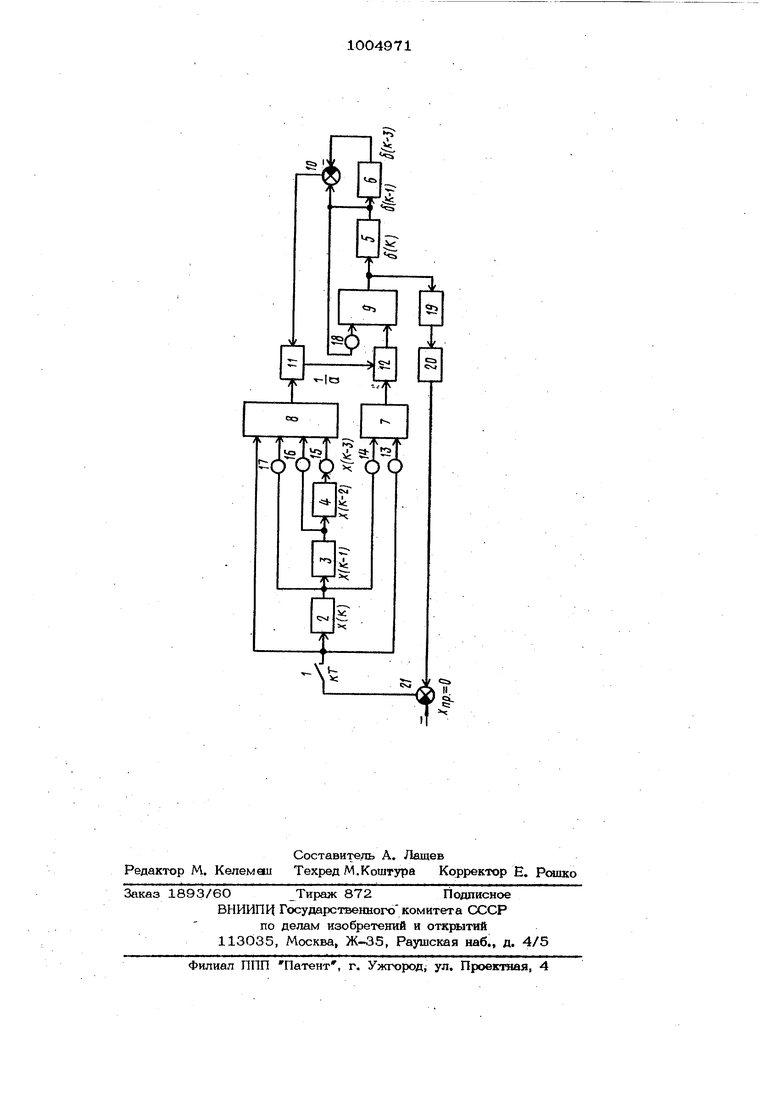
Изобретение относится к дискретным беспоисковым самонастраивающимся системам автоматического управления для нейтральных объектов второго порядка и может быть использовано, например, в самонастршивающихся системах управлени движением летательных аппаратов при неизвестном заранее значении коэффициен ;Та эффективности управления объекта, обеспечивающих заданное неизменное рас пределение собственнъпс значений матрицы замкнутой системы. Из известных беспоисковък самонастраивающихся систем наиболее близкой к изобретению по технической сущности является самонастраивающаяся система, содержащая блоки памяти и последовательно соединенные делитель, умножитель, первый сумматор, первый блок памяти, второй блок памяти и первый блок сравнения, второй вход которого соедине с выходом первого блока памяти и через последовательно соединенные первъгй усилитель, первый сумматор, третий блок памяти, блок управления, второй блок сравнения и ключ - к четвертому блоку памяти, въкод которого соединен с первым входом второго сумматора через второй усилитель и с первым входом третьего сумматора через третий ус ил и- тель, выходы четвертого и пятого усилителей соединены с соответствующими входами второго сумматора, выход шестого усилителя соединен с вторым входом третьего сумматора.. Недостатком известного устройства является его сложность, обусловленная наличием большого количества блоков памяти, суммирования, умножения и деления, аппаратурная реализуемость которых особенно затруднительна, и дополнительного корректирующего устройства, что снижает общую надежность устройства. Цель изобретения - повышение надежности системы. Поставленная цель достигается тем, что в системе выход четвертого блока памяти через последовательно соединен- лые пятый н шестой блоки памяти соединен с входом пятого усилителя, выход пятогю блока памяти соединен с входом четвертого усилителя, вход первого блока памяти соединен с четвертым входом второго сумматора и входом шестого усилителя, выход третьего сумматора соединен с вторым входом умножителя, выход порвого блока сравнения соединен с первым входом делителя, вторым входом соединенного с вьрсодом второго сум матера. . На чертеже изображена самонастраивающаяся система. Система содержит ключ 1, четвертый пятый и шестой, первый и второй блоки памяти соответственно 2-6, третий, второй и первый сумматоры соответственно 7,8 и 9, первый блок сравнения 10, делитель 11, умножитель 12, шестой, третий, пятый, четвертый, второй и первый усилители соответственно 13-18, третий блок памяти 19, объект управления 20 и второй блок сравнения 21. Выход объекта управления через ключ 1, замыкаюшийся через каждые Т. , подключен через усилитель 14 к первому входу сумматора 7, а также непосредс- венно к входу сумматора 8 и входу /блока 2 памяти на период дискретности. Вы ход этого блока памяти подключен через усилитель 14 ко второму входу суммато ра 7, а также через усилитель 17 - к второму входу усилителя- 8 и непосредственно - к входу блока 3 памяти на период дискретности, выход этого блока ппмятт непосредственно подключен к входу блока 4 памяти на период дискретное ти и через усилитель 16 - к третьему входу сумматора 8. Выход блока 4 памя ти на период дискретности через усилитель 15 соединен с четвертым входом сумматора 8, выход которого подключен к входу (входу делителя) делителя 11, второй вход Ktxroporo (вход делимого) соединен с выходом блока сравнения 10. Выход делителя 11 соединен с первым входом умножителя 12, а второй вход этого умножителя соединен с выходом сумматора 7. Выход умножителя непосредственно соединен с первым входом сумматора 9, а вход его через усилтй- тель 18 соединен с выходом блока памяти на период дискретности. Также выход этого блока 5 памяти непосредственно подключен к входу (входу уменьшаемого) блока сравнения 10 и к входу блока 6 памяти на два периода дискретности, выход которого соединен с вторым входом (входом вычитаемого) блока срав нения 1О. Выход сумматора 9 подключен К входу блока 5 памяти на период дискретности, а также к блоку памяти 19 - фиксирующему звену нулевого порядка и через него к объекту управления 20. Работа устройства состоит в запоминании дискретных значений сигналов ),Х(, X(fc-3)c помощью блоков 24 памяти на период дискретности и c/(K-1 сЛ()с помощью блока памяти 5 на один период .дискретности и на два периода дискретности блока памяти 6; суммировании сигналов х(1сЬ х() ,Х (k-2), x()c соответствующим их усилением усилителями 13-17 с помощью сумма то- роЬ 7 и 8; формировании с помощью блока сравнения 10 сигнала (/(fc-1)-cr(ik-3); делении этого сигнала на выходной сигнал сумматора 8 с целью идентификации параметра объекта управления - ( 01 фактическое возмущенное значение коэффициента эффективности управления объекта); умножении ВЫХОДН9ГО сигнала сумматора 7 на полученный сигнал - с выхода делителя 11 умножителем 12; суммировании выходного сигнала блока па.мяти 5, усилению усилителем 18, с выходным сигналом умножителя 12осумматором 9, на выходе которого формируется требуемое дискретное значение управляющего воздействия сЛ11с). Этот сигнал поступает на блок 5 памяти на период дискретности, выходной сигнал которого сЛ() поступает на вход блока памяти на два периода дискретности для формирова- «« сигнала cr(lt-i), блок сравнения 10 и усилитель J.8, а также сигнал (У(1) поступает на фиксирующее звено нулевого порядка (блок памяти) 19 и через него на объект управления 20. Через время , где Т - период дискретности системы (период замыкания ключа 1, или интервал времени, в течение которого на выходе фиксируюШего эвена нулевого по.рядка (блок памяти) 19 управляющее воздействие (At 11) сохраняете я неизменным), создаются условия для идентификации пара метра объекта управления -i и неизмеряемой координаты На основе измеренного и прошедших (сохраненных в блоках памяти) значений сигналов изменяются выходнъге сигналы сумматоров 7-9 и блока сравнения 10,
а с помощью делителя 11 вычисляется (})актическое значение параметра объекта у1С1равлеиия . С помощью ключа 1, блоков памяти на период дискретности, усилителей 13 и 14, сумматоров 7 и 9 и умножителя 12 формируется оптимальный сигнал управления (/(К), который обеспечивает- требуемый режим работы замкнутой системы при отсутствии начальной информации о фактическом значеНИИ параметра объекта управления - . При этсяи характер переходного процесса замкнутой системы не зависит от фактического значения коэффициента объекта управления -g и определяется только
предварительно оптимально заданными .собственными значениями матрицы замкнутой системы. Это приводит к обеспечению способности системы сохранять свои динамические характеристики в заданных пределах при изменении условий ее функционирования непредвиденным образом.
Преимуществом предлагаемой системы является ее простота, обусловленная требованием меньшего количества блоков, и, следовательно, повьииение ее надежности.
Известно, что с точки зрения аппаратурной реализации наиболее трудоемкщули |и слояшыми являются операции деления, умножений, запоь: :нания и суммирования входных Сигналов. В этом смысле- предлагаемая дискретная самонастраивающая система является более экономичной.
Предлагаемая дискретная самонастраивающаяся система имеет простую схему и выгодно отличается от известных ана логичных схем, так как для ее реализаци требуется минимальное количество типовых вычислительньк устройств автоматик Это позволяет не проводить дорогостоящие исследования при проектировании дискретной системы управления, так как регулятор способен быстро (в течение . трех периодов дискретности) определить реальное фактическое значение коэффициента эффективности управления объекта, а затем определить требуемые значения коэффициентов закона управления
заранее известной структуры с целью обеспечения заданной цели оптимального управления.
Формула изобретения
Самонастраивающаяся система, содержащая блоки памяти и последовательно соединенные делитель, умножитель, первый сумматор, первый блок памяти, второй блок памяти и первый блок сравнения второй вход которого соединен с въкодом первого блока памяти и через последовательно соединенные первый усилитель, первый сумматор, третий блок памяти, блок управления, второй блок сравнения и ключ - к четвертому блоку памяти, выход которого соединен с первым входом второго сумматора через второй усилитель и с первътм входом третьего сумматора через третий усилитель, выходы четвертого и пятого усилителей соединен с соответствующими входами второго сумматора, выход щестого усилителя соединен с вторым входом третьего сумматора, отличающаяся тем, что, с целью повышения надежности системы, в ней выход четвертого блока памяти через последовательно соединенные пяты и щестой блсжи памяти соединен с входо пятого усилителя, въссод пятого блока памяти соединен с входом четвертого усилителя, вход первого блока памяти соединен с четвертым входом второго сумматора и входом шестого усилителя, выход третьего сумматора соединен с вторъ1м входом умножителя, въкод первого блока сравнения соединен с первым входом делителя, вторым входом соединенного с въкодом второго сумматора.
Источники информации, принятые во внимание при экспертис-е
1. Авторское свидетельство СССР по заявке № 289О9О4/24, . кл. G О5 В 13/02,3980 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Самонастраивающаяся система | 1980 |
|
SU983649A1 |
| Дискретный самонастраивающийся регулятор | 1973 |
|
SU544942A1 |
| Адаптивная система управления | 1984 |
|
SU1257607A1 |
| Дискретная самонастраивающаяся система | 1979 |
|
SU824139A1 |
| САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА КОМБИНИРОВАННОГО РЕГУЛИРОВАНИЯ | 1989 |
|
RU2022313C1 |
| ПЕЛЕНГАТОР | 1991 |
|
RU2073880C1 |
| Устройство для измерения динамических характеристик | 1983 |
|
SU1168902A1 |
| РАДИОПРИЕМНОЕ УСТРОЙСТВО МНОГОЧАСТОТНЫХ СИГНАЛОВ | 2005 |
|
RU2310992C2 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД | 1994 |
|
RU2060530C1 |
| КАСКАДНАЯ ДВУХКАНАЛЬНАЯ САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА КОМБИНИРОВАННОГО УПРАВЛЕНИЯ | 2006 |
|
RU2327196C1 |
Си,
II
J
