ка умножения соединены с выходами третьего н седьмого сумматоров, а выход - с входом четвертого сумматора, другой вход которого нодключен к выходу второго блока умножения, входами связанного с выходами второго и шестого сумматоров. Выход нятого сумматора соединен с нервымн входами нервого и второго делителя, другие входы которых соответственно нодключены к выходам иервого н четвертого сумматоров. Выходы блоков деления через нятый и шестой усилители нодсоединены к управляющим входам корректируюш,его устройства.
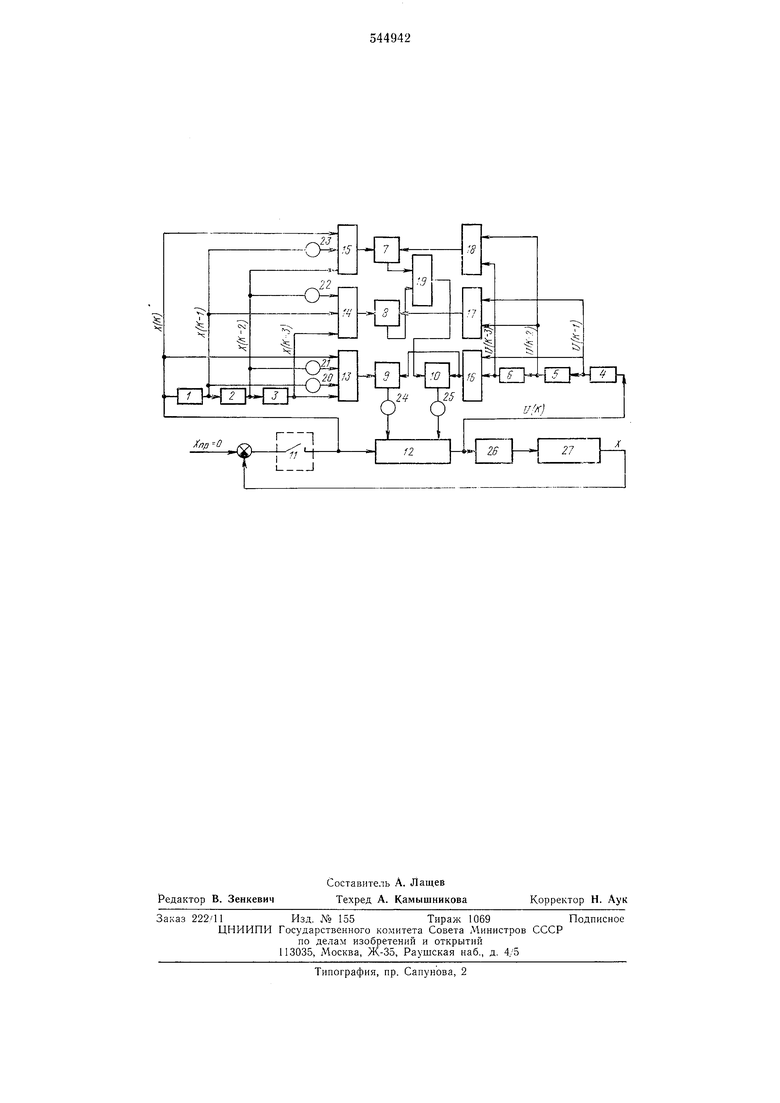
На чертеже иредставлена схема устройства.
Устройство содержит блоки 1-6 иамяти, первый 7 и второй 8 блоки умножения, нервый 9 и второй 10 блоки деления, ключ 11, корректируюш,ее устройство 12, сумматоры 13-19, усилители 20-25 н фиксируюш,ее звено 26 нулевого порядка, иодключенное к входу объекта 27.
Работа устройства состоит в заиоминаиин значений дискретных сигналов x(k-3), x(k- 2), x(, U(k-3), U(k-2), U(k-) с ИОмогцью блоков 1-6, суммировании с соответствуюш,нм усилением указанных сигналов с сигналом x(k) в сумматорах 13-19, умножении с помогцью блоков 7 и 8 и делении результирующих сигналов блоками 9 н 10.
Через время t 3T сек создаются условия идентификации коэффициентов возмущения / н объекта управления. На основе этнх величин нзменяются коэффициенты корректирующего устройства 12 так, чтобы определить оитимальное управление, которое обеспечит требуемую точность н надежность работы системы нри неполной и даже неизвестной начальной информации о значениях действительных параметров объекта управления 27 и действующих на него возмущений.
Применение дискретного самонастраивающегося регулятора позволяет за три такта решить задачу идентификации для нейтрального объекта второго порядка и определить параметры корректирующего устройства 12, обеспечивающего выработку оптимал1)Иого управления. При этом повышается не только точность, но и надежность, как свойство системы сохранять свои характеристики в заданных пределах. В частности, осуществляется стабилизация корней характеристического уравиения замкнутой системы.
Предлагаемый регулятор имеет иростую структурную схему и выгодно отличается от известных аналоговых схем, так как требуется минимальное количество тиновых устройств автоматики. Это позволяет не проводить большие и дорогостоящие исследования при проектировании дискретной системы управлеиия, так как устройство способно быстро о.чрсдслпть реальные иараметры объекта, а зате.м настроить корректирующее устройство заранее известной структуры.
Формула изобретения
Дискретный самонастраивающийся регулятор для нейтральных объектов второго норяд0 ка, содержащий ключ, соединенный через корректирующее устройство с фиксирующим звеиом иулевого порядка, блоки иамяти, сумматоры, усилители, блоки умножения и делеиия, отличающийся тем, что, с целью ио5 вышения точности н надежности регулятора, выход ключа через первые три последовательио соединенных блока иамяти подключен к иервым входам иервого и второго сумматоров, выход первого блока памяти через первый
О усилитель неиосредственно и через четвертый усилитель подключен соответственно к вторым входам нервого, второго и третьего сумматоров, выход второго блока памяти через второй усилитель, третий усилитель и непосредственно иодключен соответственно к третьим входам иервого и второго сумматоров и первому входу третьего сумматора, четвертый вход иервого сумматора и третий вход третьего сумматора соединены с выходом ключа, выход корректирующего устройства через вторые три последовательно соединенных блока памяти подключен к первым входам нятого и седьмого сумматоров, другие входы которых соединены соответственно с выходом четвертого н пятого блоков памяти, подключенным так же к входам шестого сумматора, входы первого блока умножения соединены с выходами третьего и седьмого сумматоров, а выход- с входом четвертого сумматора, другой
0 вход которого подключен к выходу второго блока умиожеиия, входы которого соединены с выходами второго и щестого сумматоров, выход пятого сумматора соединен с первыми входами первого и второго делителя, другие
5 входы которых соответственио подключены к выходам первого и четвертого сумматоров, выходы блоков деления через пятый и щестой усилители подключены к управляющим входам корректирующего устройства.
Источники информации, принятые во внимание ири экспертизе:
1. Ли Р. Оитимальные оценки, онределение характеристик и управление. «Наука, 1969.
2. Козлов Ю. М., Юсупов Р. М. Беспоисковые самонастраивающиеся системы. «Наука, 1969.
3. Самонастраивающиеся системы. Справочник, Киев, 1969 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Самонастраивающаяся система | 1981 |
|
SU1004971A1 |
| Дискретная самонастраивающаяся система | 1979 |
|
SU824139A1 |
| САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА КОМБИНИРОВАННОГО РЕГУЛИРОВАНИЯ | 1989 |
|
RU2022313C1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД | 1994 |
|
RU2060530C1 |
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1511734A1 |
| САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ | 2016 |
|
RU2616219C1 |
| Самонастраивающийся электропривод робота | 1990 |
|
SU1773714A1 |
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1339494A1 |
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1386957A1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД | 2015 |
|
RU2592036C1 |