Изобретение относится к самообучающнмся системам автоматического управления и может быть использовано в различных отраслях промьшшенности для управления объектами с транспортным запаздыванием и вoз ryщaющ(ми воздействиями типа смесей сыпучих материалов (например, для автоматического управления процессами добычи и обогащения угля).
Целью изобретения является повышение точности работы системы управ-: . ления.
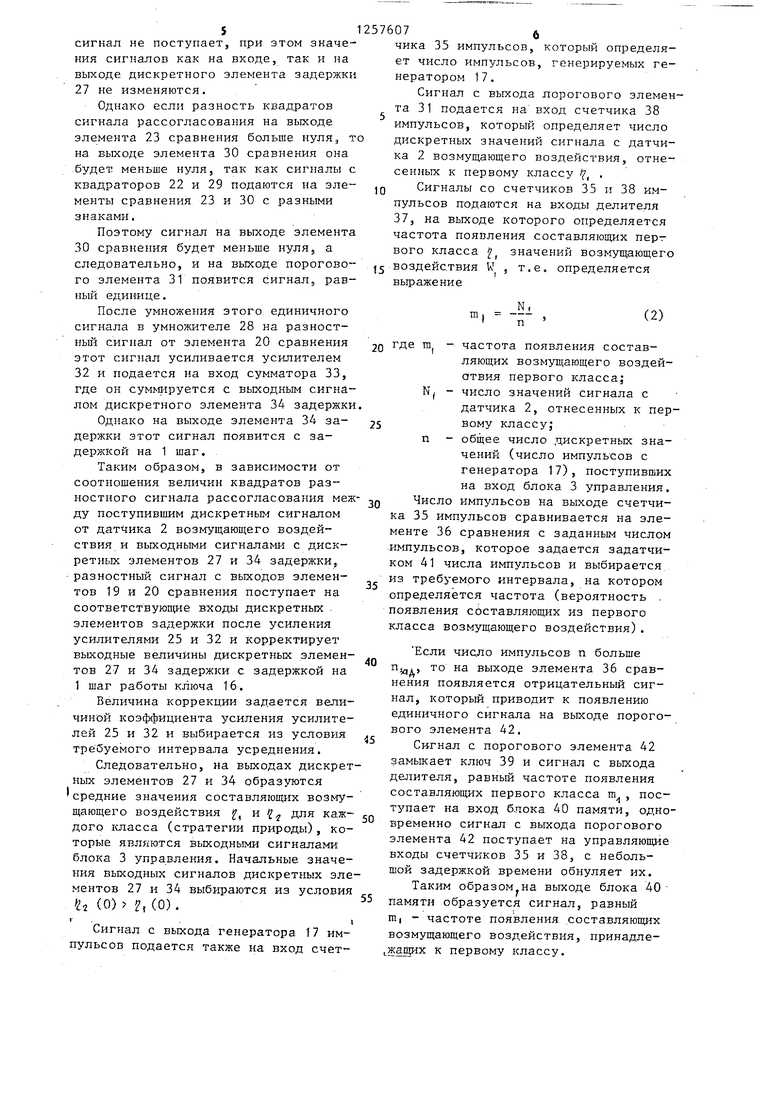
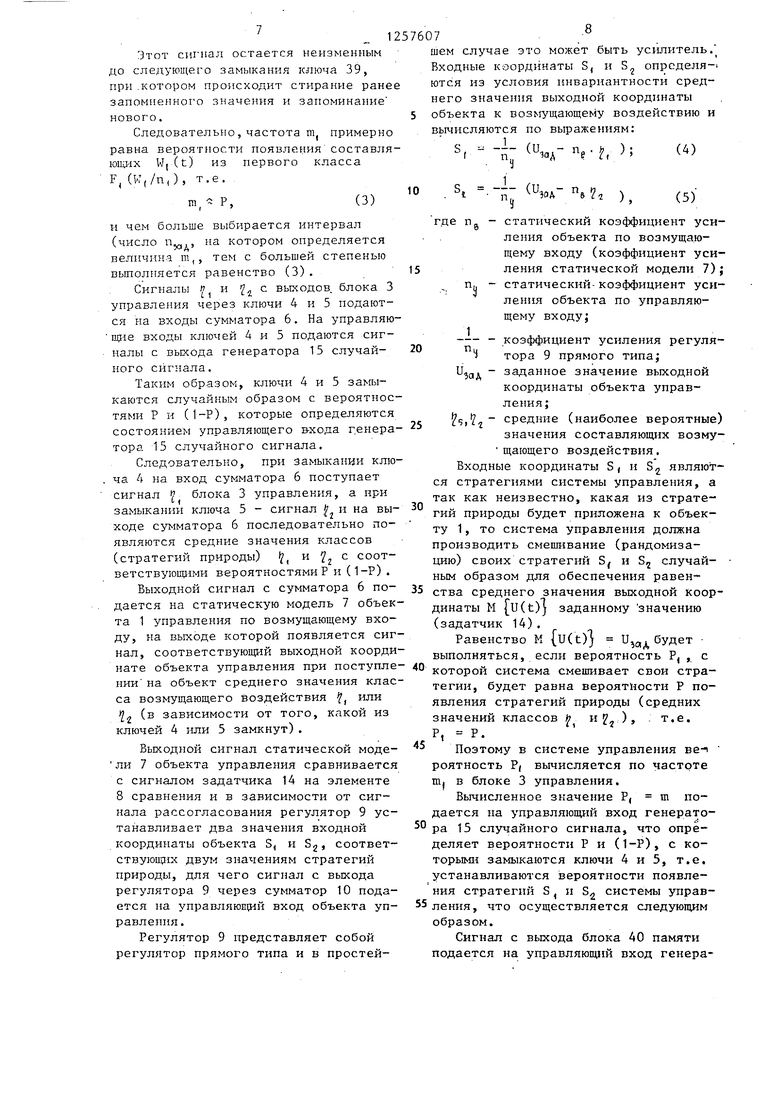
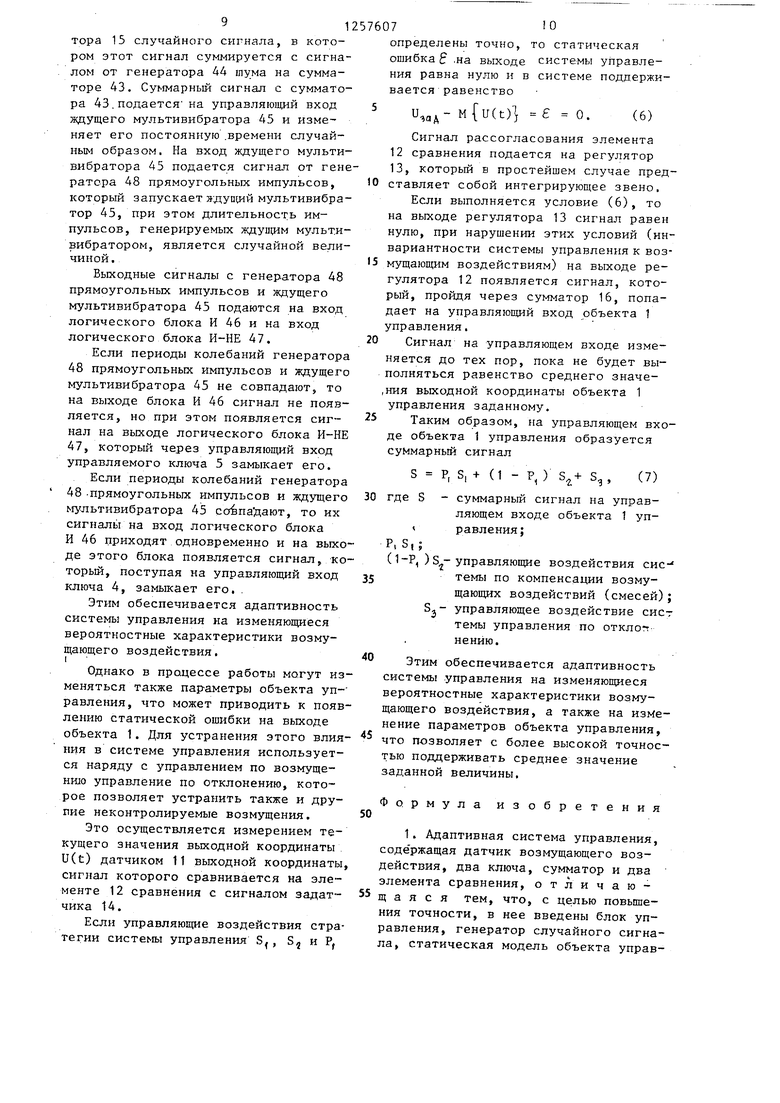
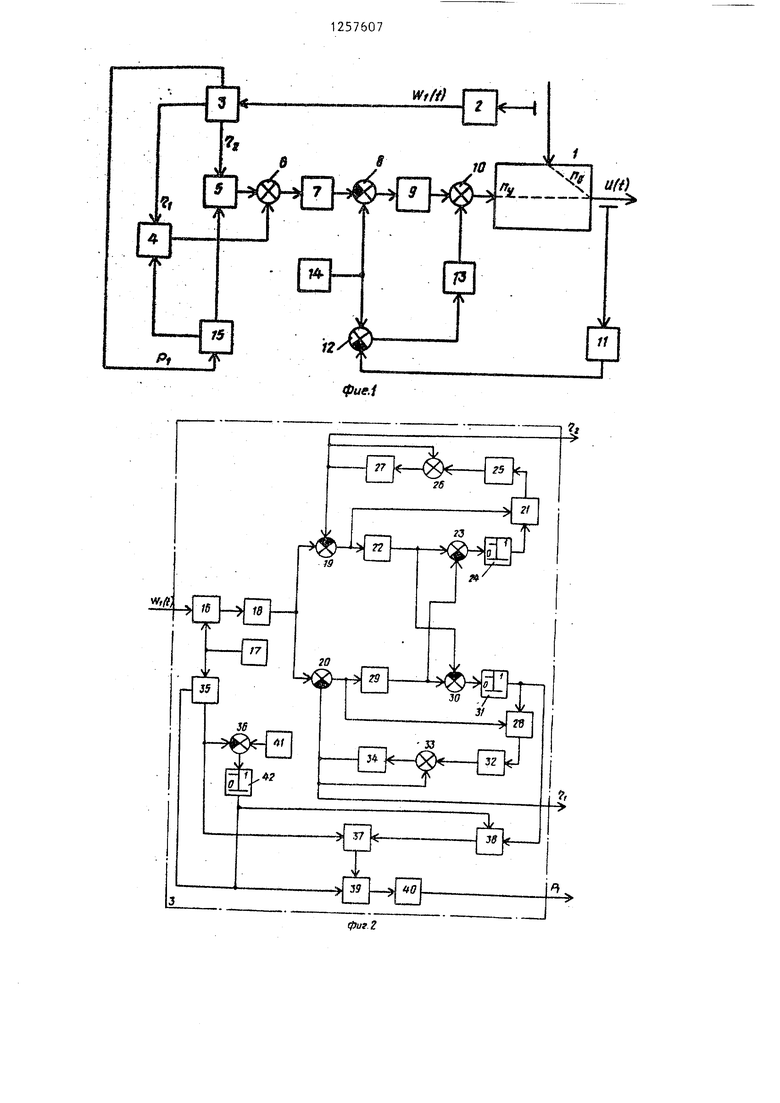
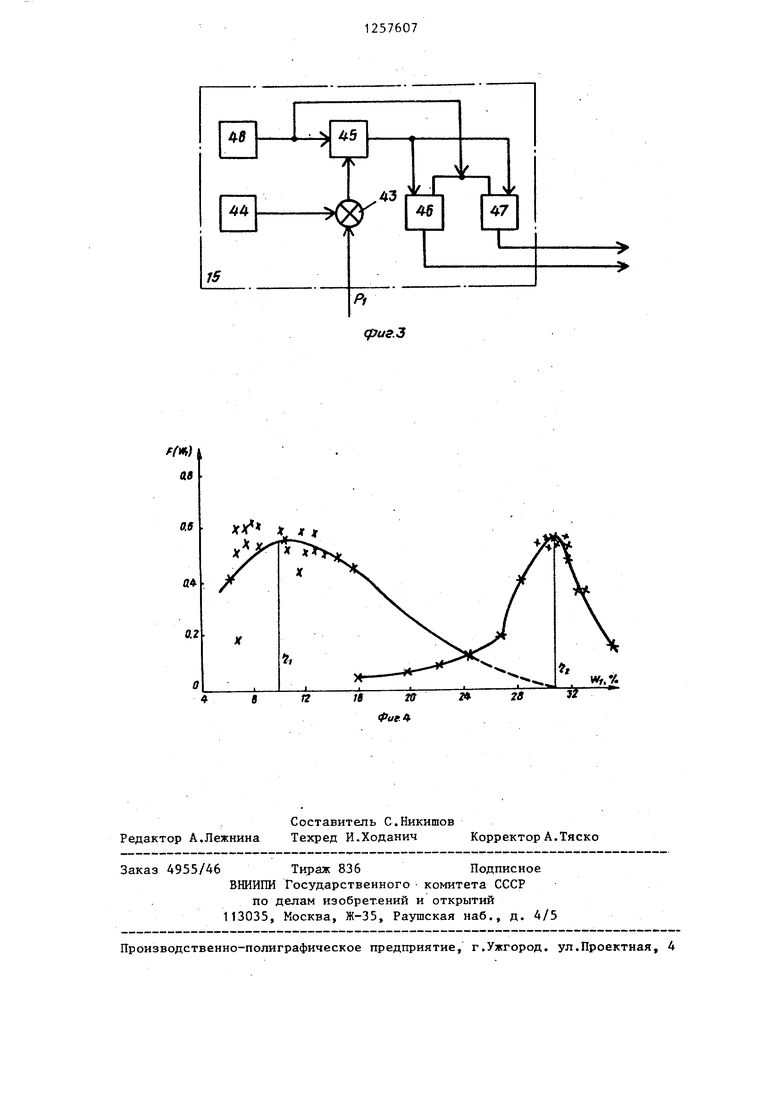
На фиг.1 представлена блок-схема предлагаемой системы управления; на фиг.2 - блок-схема блока управления; па фиг.З - блок-схема генератора случайного сигнала; на фиг.4 - совместная плотность распределения вероятности возмущающего воздействия.
Адаптивная система управления со- дерйагг (фиг.1) объект 1 управления, в который включен исполнительный орган (не показан), датчик 2 возмущающего воздействия, блок 3 управления, ключи 4 и 5, сумматор 6, статическую модель 7 объекта управления, элемент 8 сравнения, регулятор 9, второй сумматор 10, датчик 11 выходной координаты, второй элемент 12 сравнения, второй регулятор 13, задатчик 14 режима и -генератор 15 случайного сигнала. Блок управления (фиг.2) содержит ключ 16, генератор .17 импульсов, блок 18 памяти, элементы 19 и 20 сравнения, умножитель 21, квадратор 22, элемент 23 сравнения, пороговый эле- мент 24, усгшитель 25, сумматор 26, дискретный элемент 27 задержки, второй умножитель 28, второй квадратор 29, элемент 30 сравнения, второй пороговый элемент 31, второй усилитель 32, второй сумматор 33, второй дискретный элемент 34 задержки, счетчик 35 импульсов, элемент 36 сравне- .ния, делитель 37, второй счетчик 38 импульсов, ключ 39, второй блок 40 памяти, задатчик 41 числа импульсов и третий пороговый элемент 42.
Генератор случайного сигнала состоит (фиг.З) из сумматора 43, генератора 44 шума, ждущего мультивибратора 45, логического элемента И 46, логического элемента И-НЕ 47 и гене- ратора 48 прямоугольного импульса.
Типичный вид совместной плотности распределения вероятности возму- дающего воздействия показан на фиг.4
(Wj - значения возмущающего воздействия; F(W) - совместная плотность распределения вероятности возмущаю- ,щего воздействия) , Как видно из
(фиг.4)5 изменения величины возмущающего воздействия представляют собой сумму (смесь) двух случайных процессов со средними значениями и 2 J закон распределения которых
близок к нормальному.
При управлении такими объектами : необходимо знать параметры, из которых образована конечная (наблюдае-- мая) смесь - возмущающее воздействие
(например, смесь рядового угля, поступающего на продесс обогащения, и др) .
Выражение для функции распределе- . ния вероятности смеси для случая
двух классов (двух составляющих) возмущающего воздействия имеет вид
F(W,) PF,(W,/, ) +((l-p)F;/W,/)
(1)
где F(W, ) - функция распределения параметров смеси возму- щающего воздействия (W. - например зрль- ность, влажность сыпучего материала и др.);
/) функция распределения вероятности первого класса составляющей возмущающего воздействия
со средним (наиболее вероятным) значением ;
функция распределения вероятности второго класса составляющий возмущающего воздействия со средним (наиболее вероятным) значением ; Р - вероятность появления
45
значения W( из класса
I
50
F4(W,/, );
Задача управления в этом случае сводится к тому, что требуется, наблюдая смешанную реализацию возмуп аю- щего воздействия F(W), разделить смесь на классы и определить их параметры 2, , 22 основании которых скорректировать (случайным образом) значения управляющей координаты объекта управления таким образом, 55 чтобы среднее значение выходной координаты объекта было равно заданному.
Так как параметры смеси - возмущающего воздействия поступают на объект случайным образом, то и коррекция управляющего входа объекта управления также должна производиться случайным образом. Это соответствует закону адекватности или десятой теореме Шеннона, когда случайность, вносимая возмуща оп1 1м воздействием, компенсируется случайностью генератора случайного сигнала, используемого в системе управления.
Это позволяет рассматривать управление объектом как статическую игру двух игроков: природы и системы управления, в которой второй игрок - система управления, является стати- ческим, а первый игрок - природа.
Стратегиями природы являются средние значения процессов и , которые появляются с вероятностями Р и (1 - Р), а стратегиями системы управления - соответствующие этим режимам значения входной (управляющей) коор- динаты объекта управления S, и S.
Управление в этом случае сводится к определению стратегий природы , и .j и вероятности их появления Р и (1 - Р), определению для этих стратегий значений входных координат объекта управления S| и S , которые являются стратегиями системы управления, и смешиванию (рандомизации) страте- .гий S, и Sj системой управления с вероятностью Р и (1 - Р) таким образом чтобы среднее значение выходной координаты объекта управления было равно заданному значению выходной координаты (задатчик 14) .
Система управления работает следующим образом.
Сигнал с датчика 2 возмущающего воздействия подается на вход блока 3 управления, в котором он разделяется на два класса (два случайных процесса) и в котором определяются средние значения возмущающего воздействия для этих двух классов ( и ), а также вероятности их появления. С этой целью сигнал с генератора 17 им- пульсов подается на управляющий вход ключа 16, который, замыкаясь, подает сигнал с датчика 2 возмущающего воздействия на вход блока 18 памяти. Последний запоминает значение сигнала от датчика 2 возмущающего воздействия в момент замыкания ключа 16.
При отсутствии сигнала с генератора 17 импульсов ключ 16 размыкается-, при этом сигнал с датчика 2 возмущающего воздействия на блок 18 памяти не проходит и на выходе блока 18 остается сигнал, соответствуюпрш сигналу с датчика 2 в момент замыкания ключа 16.
При следующем замыкании ключа 16 происходит стирание ранее поступившего сигнала в блоке 18 памяти и запоминание нового значения сигнала от.датчика 2 возмущающего воздей- ствия.
Таким образом, на выходе блока 18 памяти образуются дискретные значения сигнала от датчика 2 возмущающего воздействия, соответствующие мо ме1 ;Там замыкания ключа 16.
Сигналы с выхода блока 18 памяти подаются на первые входы элементов 19 и 20 сравнения, где из этого сигнала вычитаются сигналы от дискретных элементов 27 и 34 задержки.
Разностный сигнал с выхода элемента 19 сравнения подается на вход квадратора 22, а разностный сигнал с выхода элемента 20 сравнения - на вход квадратора 29.
Квадраты разностных сигналов с блоков 22 и 29 сравниваются между собой на элементах 23 и 30 сравнения
Если разность квадратов сигнала рассогласования на выходе элемента 23 сравнения меньше нуля, то при попадании этого сигнала на пороговый ;
элемент 24 на его выходе появляется сигнал, равный единице, и после умножения этого единичного сигнала в умножителе 21 на разностный сигнал с элемента 19 сравнения этот сигнал усиливается усилителем 25 и поступает на сумматор 26, где он суммируется с выходным сигналом дискретного элемента 27 задержки.
Однако на выходе элемента 27 за- держки суммарный сигнал с выхода сумматора 26 появляется при следующем поступлении сигнала на вход сумматора 26 с умножителя 21, т.е. происходит задержка дискретного сигнала на 1 шаг.
Если разность квадратов сигнала рассогласования на выходе элемента сравнения 23 больше нуля, то на вы- ходе порогового элемента 24 появляется сигнал, равньй нулю, и после мно жения нулевого сигнала на разностный сигнал от элемента 19 сравнения па выходе умножителя 21 величина сигнала равна нулю и на вход сумматора 26
сигнал не поступает, при этом значения сигналов как на входе, так и на выходе дискретного элемента задержки 27 не изменяются.
Однако если разность квадратов сигнала рассогласования на выходе элемента 23 сравнения больше нуля, т на выходе элемента 30 сравнения она будет меньше нуля, так как сигналы с квадраторов 22 и 29 подаются на элементы сравнения 23 и 30 с разными знаками.
Поэтому сигнал на выходе элемента 30 сравнения будет меньше нуля, а следовательно, и на выходе порогового элемента 31 появится сигнал, равный единице.
После умножения этого единичного сигнала в умножителе 28 на разност- ньш сигнал от элемента 20 сравнения этот сигнал усиливается усилителем 32 и подается на вход сумматора 33, где он суммируется с выходным сигналом дискретного элемента 34 задержки
Однако на выходе элемента 34 задержки этот сигнал появится с задержкой на 1 шаг, ,
Таким образом, в зависимости от соотношения величин квадратов разностного сигнала рассогласования между поступившим дискретным сигналом от датчика 2 возмущающего воздействия и выходными сигналами с дискретных элементов 27 и 34 задержки, разностный сигнал с выходов элементов 19 и 20 сравнения поступает на соответствующие входы дискретных . элементов задержки после усиления усилителями 25 и 32 и корректирует выходные величины дискретных элементов 27 и 34 задержки с задержкой на 1 шаг работы ключа 16.
Величина коррекции задается величиной коэффициента усиления усилителей 25 и 32 и выбирается из условия требуемого интервала усреднения.
Следовательно, на выходах дискретных элементов 27 и 34 образуются средние значения составляющих возмущающего воздействия , к 1 для каждого 1шасса (стратегии природы), которые являются выходными сигналами блока 3 управления. Начальные значения выходных сигналов дискретных элементов 27 и 34 выбираются из условия
и (0) , (0).
I- . .
Сигнал с выхода генератора 17 импульсов подается также на вход счет
6
10
чика 35 импульсов, который определяет число импульсов, генерируемых генератором 17,
Сигнал с выхода порогового элемента 31 подается на вход счетчика 38 импульсов, который определяет число дискретных значений сигнала с датчика 2 возмущающего воздействия, отнесенных к первому классу , .
Сигналы со счетчиков 35 и 38 импульсов подаются на входы делителя 37, на выходе которого определяется частота появления составляющих перг вого класса , значений возмущающего
15 воздействия выражение
W , т.е, определяется
N,
т,
п
(2)
5
0
N, п
Q где т - частота появления составляющих возмущающего воздействия первого класса; число значений сигнала с датчика 2, отнесенных к первому классу;
общее число дискретных значений (число импульсов с генератора 17), поступивших на вход блока 3 управления. Число импульсов на выходе счетчика 35 импульсов сравнивается на элементе 36 сравнения с заданным числом импульсов, которое задается задатчи- ком 41 числа импульсов и выбирается из требуемого интервала, на котором определяется частота (вероятность . появления составляющих из первого класса возмущающего воздействия).
Если число импульсов п больше п,, то на выходе элемента 36 сравнения появляется отрицательный сигнал, который приводит к появлению единичного сигнала на выходе порогового элемента 42,
Сигнал с порогового элемента 42 замыкает ключ 39 и сигнал с выхода делителя, равный частоте появления составляющих первого класса га, поступает на вход блока 40 памяти, одновременно сигнал с выхода порогового элемента 42 поступает на управляющие входы счетчиков 35 и 38, с небольшой задержкой времени обнуляет их.
Таким образом на выходе блока 40 памяти образуется сигнал, равный Ш - частоте появления cocтaвляющJix возмущающего воздействия, принадле- жалщх к первому классу.
1257607
Этот сигнал остается неизменным шем случае это может быть усилитель. до следующего замыкания ключа 39, Входные координаты S, и S определи-.
ются из условия инвариантности среднего значения выходной координаты 5 объекта к вoз ryщaюIцeмy воздействию и
10
15
при .котором происходит стирание ранее запомненного значения и запоминание нового.
Следовательно,частота т примерно равна вероятности появления составля- 10ВД-1Х W( (t) из первого класса F (К,/п,), т.е.
т, Р,(3)
и чем больше выбирается интервал (число п,., на котором определяется величина т,, тем с большей степенью выполняется равенство (3).
Сигналы и 1 с. выходов, блока 3 управления через ключи 4 и 5 подаются на входы сумматора 6. На управляю- mjie входы ключей 4 и 5 подаются сиг- налы с выхода генератора 15 случайного сигнала.
Таким образом, ключи 4 и 5 замыкаются случайным образом с вероятностями Р и (1-Р), которые определяются состоянием управляюш:его &хода г.енера- тора 15 случайного сигнала.
Следовательно, при замыкании клю- . ча 4 на вход сумматора 6 поступает
20
вьгчисляются по выражениям:
t-4- (, ); ()
.S. .- (и,,,-п,
где Пц - статический коэффициент усиления объекта по возмущающему входу (коэффидиент усиления статической модели 7); nq - статический-коэффициент усиления объекта по управляющему входу;
- коэффициент усиления регуляЧ тора 9 прямого типа;
сигнал блока 3 управления, а при замыкании ключа 5 - сигнал и на выходе сумматора б последовательно появляются средние значения классов (стратегий природы) и 1 с соот- ветствуюшд ми вероятностями Р и (1-Р) .
30
- заданное значение выходной координаты объекта управления;
, средние (наиболее вероятные) значения составляющих возму- щающего воздействия. Входные координаты S и Sj являются стратегиями системы управления, а так как неизвестно, какая из стратегий природы будет приложена к объекту 1, то система управления должна производить смешивание (рандомизацию) своих стратегий Sj и S случайным образом для обеспечения равен- Выходной сигнал с сумматора 6 по- 35 ства среднего значения выходной коор- дается на статическую модель 7 объек- динаты М u(t) заданному sHaMeHHro та 1 управления по возмущающему вхо- (задатчик 14).
ду, на выходе которой появляется сиг- Равенство М (u(t) и,д, будет - нал, соответствующий выходной коорди- выполняться, если вероятность Р, , с нате объекта управления при поступле- до которой система смешивает свои стра- нии-на объект среднего значения клас- тегии, будет равна вероятности Р по- са возмущающего воздействия , или явления стратегий природы (средних
значений классов и ), . т.е.
Р Р
г, г.
Поэтому в системе управления ве-п роятность Р( вычисляется по частоте ffij в блоке 3 управления.
Вычисленное значение Р, m подается па управляющ1п 1 вход генерато- ра 15 случайного сигнала, что определяет вероятности Р и (1-Р), с которыми замыкаются ключи 4 и 5, т.е. устанавливаются вероятности появле (в зависимости от того, какой из ключей 4 или 5 замкнут).
Выходной сигнал статической моде- ли 7 объекта управления сравнивается с сигналом задатчика 14 на элементе 8 сравнения и в зависимости от сигнала рассогласования регулятор 9 устанавливает два значения входной координаты объекта S, и S, соответствующих двум значениям стратегий природы, для чего сигнал с выхода регулятора 9 через сумматор 10 подания стратегий S, и S системы управния стратегий S, и S системы управется на управляюпа1й вход объекта уп-55 ления, что осуществляется следующим
равления.образом.
Регулятор 9 представляет собойСигнал с выхода блока 40 памяти
регулятор прямого типа и в простей-подается на управляющий вход генера
вьгчисляются по выражениям:
t-4- (, ); ()
.S. .- (и,,,-п,
где Пц - статический коэффициент усиления объекта по возмущающему входу (коэффидиент усиления статической модели 7); nq - статический-коэффициент усиления объекта по управляющему входу;
- коэффициент усиления регуляЧ тора 9 прямого типа;
30
35
ния стратегий S, и S системы управления, что осуществляется следующим
тора 15 случайного сигнала, в котором этот сигнал суммируется с сигналом от генератора 44 шума на сумматоре 43. Суммарный сигнал с сумматора 43.подается на управляющий вход ждущего мультивибратора 45 и изменяет его постоянную .времени случай- ньпч образом. На вход ждущего мультивибратора 45 подается сигнал от генератора 48 прямоугольньгх импульсов, который запускает эдуп(ий мультивибратор 45, при этом длительность импульсов, генерируемых ждупц1м мультивибратором, является случайной величиной.
Выходные сигналы с генератора 48 прямоугольных импульсов и ждущего мультивибратора 45 подаются на вход логического блока И 46 и на вход логического блока И-НЕ 47,
Если периоды колебаний генератора 48 прямоугольных импульсов и ждущего мультивибратора 45 не совпадают, то на выходе блока И 46 сигнал не появляется, но при этом появляется сигнал на выходе логического блока И-НЕ 47, который через управляющий вход управляемого ключа 5 замыкает его.
Если периоды колебаний генератора 48 -прямоугольных импульсов и ждущего ьгультивибратора 45 сстбпа дают, то их сигналы на вход логического блока И 46 приходят одновременно и на выходе этого блока появляется сигнал, который, поступая на управляющий вход ключа 4, замыкает его. .
Этим обеспечивается адаптивность системы управления на изменяющиеся вероятностные характеристики возмущающего воздействия.
Однако в процессе работы могут изменяться также параметры объекта уп- равления, что может приводить к появлению статической ошибки на вькоде объекта 1. Для устранения этого влия- ния в системе управления используется наряду с управлением по возмуще- ншо управление по отклонению, которое позволяет устранить также и дру- пие неконтролируемые возмущения.
Это осуществляется измерением текущего значения выходной координаты U(t) датчиком 11 выходной координаты, сигнал которого сравнивается на элементе 12 сравнения с сигналом задат- чика 14.
Если управляющие воздействия стратегии системы управления S, S и Р,
определены точно, то статическая ошибка S .на выходе системы управления равна нулю и в системе поддерживается равенство
и
чад
- м u(t) е 0.
(6)
Сигнал рассогласования элемента 12 сравнения подается на регулятор 13, который в простейшем случае представляет собой интегрирующее звено.
Если выполняется условие (6), то на выходе регулятора 13 сигнал равен нулю, при нарушении этих условий (инвариантности системы управления к воз- мущающим воздействиям) на выходе регулятора 12 появляется сигнал, который, пройдя через сумматор 16, попадает на управляющий вход объекта 1 правления.
Сигнал на управляющем входе изменяется до тех пор, пока не будет выполняться равенство среднего значения выходной координаты объекта 1 управления заданному.
Таким образом, на управляющем входе объекта 1 управления образуется суммарный сигнал
S где S
Р, S, + (1 - Р, )
S.+
3
(7)
- суммарный сигнал на управляющем входе объекта 1 уп- равления;
P.S,;
(1-Р, ) S-управляющие воздействия сие- темы по компенсации возмущающих воздействий (смесей); управляющее воздействие сист темы управления по отклот нению.
э40
50
55
Этим обеспечивается адаптивность системы управления на изменяющиеся вероятностные характеристики возмущающего воздействия, а также на изменение параметров объекта управления, что позволяет с более высокой точностью поддерживать среднее значение заданной величины.
Формула изобретения
1. Адаптивная система управления, соде ржащая датчик возмущающего воздействия, два ключа, сумматор и два элемента сравнения, отличающаяся тем, что, с целью повьште- ния точности, в нее введены блок управления, генератор случайного сигнала, статическая модель объекта управления, два регулятора, второй сумматор, датчик выходной координаты и задатчик режима, причем выход датчика возмущающего воздействия подклю- чей к входу блока управления, первый и второй выходы которого соединены соответственно с первыми входами первого и второго ключей, третий выход блока управления связан с входом генератора случайного сигнала, первый и второй выходы которого подключены соответственно к вторым входам первого и второго ключей, выход первого ключа соединен с первым входом первого сумматора, выход второго ключа - с вторым входом первого сумматора, связанного через статическую модель объекта управления с первым входом первого элемента сравнения, выход датчика выходной координаты подключен к первому входу второх О элемента сравнения, выход задатчика режима - к вторым входам первого и второго элементов сравнения, выход первого элемента сравнения соединен через первый регулятор с первым входом второго сумматора, выход второго-элемента сравнения через второй регулятор - с вторым входом второго сумма- .тора, подключенного выходом к входу объекта.
2. Система управления по п.1, о т- личающаяся тем, что блок
управления содержит задатчик числа им- 35 третьего порогового элемента - с втопульсов и последовательно- соединенные ключ, блок памяти, элемент сравнения, квадратор, второй элемент сравнения, пороговый элемент, умножитель, усилитель, сумматор и дискрет-40 выход второго блока памяти связан с
ный элемент задержки, а также последовательно соединенные третий элемент сравнения, второй квадратор, четвертый элемент сравнения, второй порого
5
0
5
0
вьш элемент, второй умножитель, второй усилитель, второй сумматор, второй дискретный элемент задержки, а также последовательно соединенные генератор импульсов, счетчик импульсов, пятый элемент сравнения, третий пороговый элемент, второй счетчик импульсов, делитель, второй ключ и второй блок памяти, причем вход блока управления соединен с первым входом перво- го ключа, подключенного вторым входом к входу первого счетчика импульсов, выход первого дискретного элемента задержки связан с вторым входом первого элемента сравнения, с вторым входом первого сзт матора и вторым выходом блока управления, выход первого блока памяти соединен с первым входом третьего элемента сравнения, второй вход которого подключен к выходу второго дискретного элемента задержки, к второму входу второго сумматора и первому выходу блока управления, выход первого элемента сравнения связан с вторым входом первого умножителя, выход первого квадратора - с вторым входом чет вертого элемента сравнения, выход третьего элемента сравнения - с вторьм входом второго умножителя, выход второго квадратора - с вторым вх,одом второго элемента сравнения, выход второго порогового элемента - с вторым входом второго счетчика импульсов, выход
рым входом первого счетчика импульсов и вторым входом второго ключа, выход первого счетчика импульсов - соединен с вторым входом делителя,
третьим выходом блока управления, задатчик числа импульсов подключен к второму входу пятого элемента сравнения.
J9
(gkr
I1 yg I1
7J
FPU
rt - 
| название | год | авторы | номер документа |
|---|---|---|---|
| Адаптивная система управления | 1985 |
|
SU1361502A1 |
| ПАРАМЕТРИЧЕСКИЙ СИНТЕЗАТОР | 1970 |
|
SU265218A1 |
| Система синергетического стохастического управления технологическим процессом анаэробной очистки сточных вод | 2024 |
|
RU2835756C1 |
| Устройство для активного демпфирования упругих колебаний элементов конструкции вращающегося объекта | 1983 |
|
SU1134927A1 |
| СПОСОБ УПРАВЛЕНИЯ ДВУХКАСКАДНЫМ ОБЪЕКТОМ С ЗАПАЗДЫВАНИЕМ | 1991 |
|
RU2012032C1 |
| Система экстремального управления | 1988 |
|
SU1550474A1 |
| Устройство для моделирования стохастических объектов | 1984 |
|
SU1251096A1 |
| Система управления объекта с запаздыванием | 1984 |
|
SU1254435A1 |
| Самонастраивающаяся система управления | 1986 |
|
SU1418649A1 |
| Способ диагностирования состояния технического объекта с выбросами параметров и устройство для его осуществления | 1988 |
|
SU1573461A1 |
Изобретение относится к самообу- чающимся системам автоматического управления и может быть использовано в различных отраслях промьшшенности для управления объектами с тр нспорт- ным запаздыванием и возмущающими воздействиями типа смесей сыпучих материалов. Целью изобретения является повьшение точности работы системы управления. Поставленная цель достигается тем, что введена специальная цепь коррекции, позволяющая осуществить подстройку системы управления при изменении вероятностных характеристик возмущающего воздействия. При этом наблюдается смещанная реализация возмущающего воздействия, производится ее разделение на два класса, опре- деляется вероятность появления значе-§ НИИ возмущающего воздействия из задан- ного класса и формируется управляющее воздействие таким образом, чтобы среднее значение выходной координаты объекта было равно заданному, 1 з.п. ф-лы, 4 ил. , (Л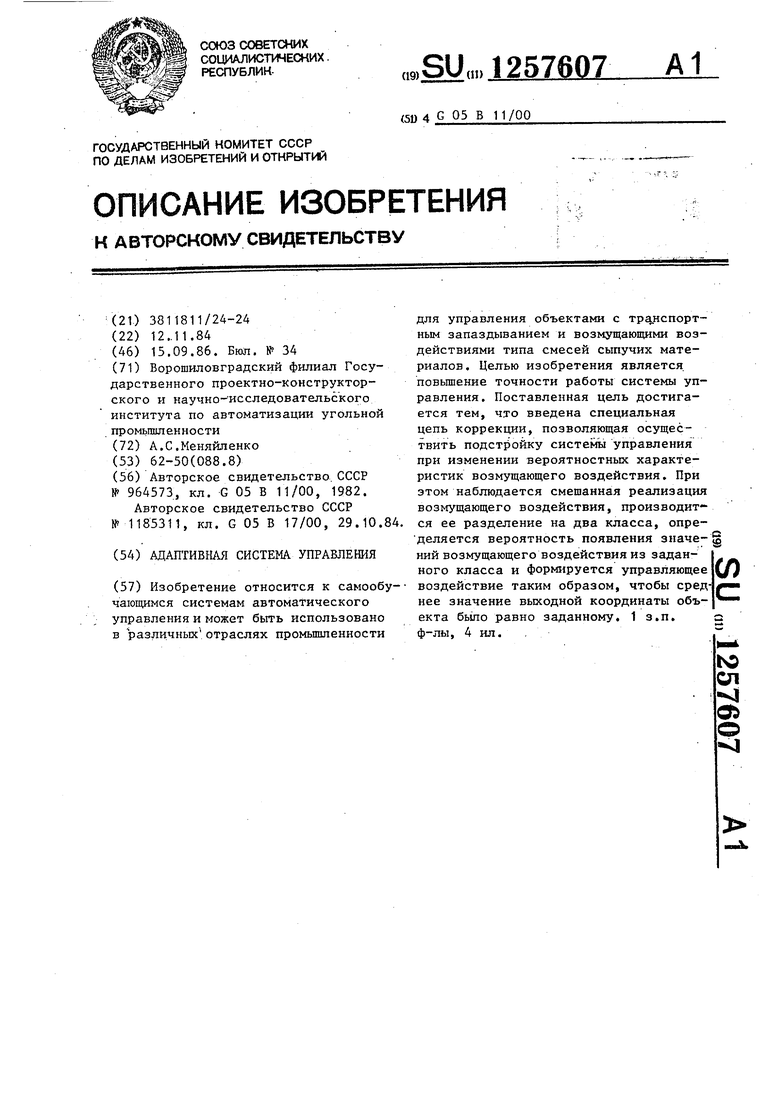
)е
Jff
,42
SH3Z
JO
/ --
- 33
ITUT
37 f
jff
фиг. 2
i
-zr
Редактор А.Лежнина
Составитель С.Никишов
Техред И.Ходанич Корректор А.Тяско
Заказ 4955/46 Тираж 836Подписное
ВНИИ1Ш Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная, 4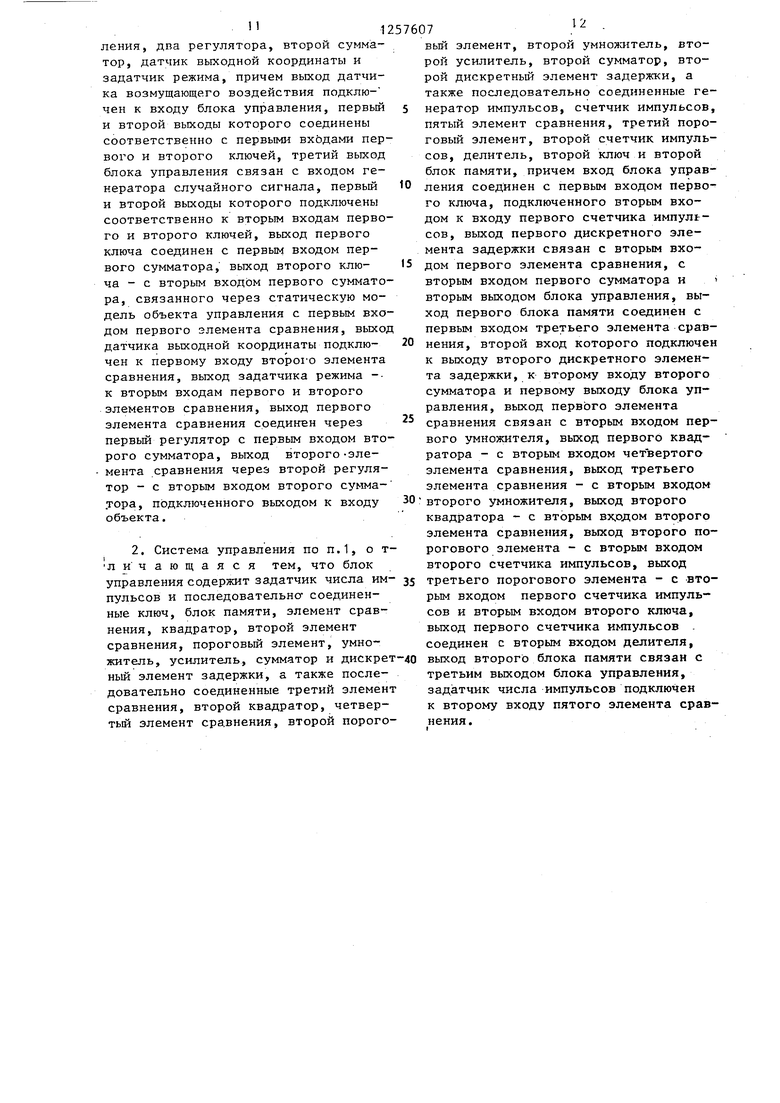
| Способ управления объектом | 1981 |
|
SU964573A2 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Авторское свидетельство СССР № 1185311, кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
