Изобретение относится к области автоматического управления и может быть использовано для управления объектами в химической и других отраслях промышленности.
Известен ряд самонастраивающихся систем, решающих задачи высококачественного регулирования нестационарных объектов, функционирующих в условиях высокого уровня контролируемых и неконтролируемых шумов, например самонастраивающаяся система комбинированного регулирования [1], содержащая датчики основного внешнего возмущения, входной и выходной координаты объекта управления, корректирующий фильтр, объект управления, измеритель рассогласования, блок самонастройки, регулятор, сумматор и исполнительное устройство. В системе организовано целенаправленное взаимодействие разомкнутого и замкнутого контуров управления посредством меры качества работы системы и анализа состояния квазистатики объекта в целях стабилизации коэффициента передачи разомкнутого контура для наиболее эффективной компенсации поступающих в объект контролируемых возмущений. Данная система является достаточно простой, надежной, имеет широкую область применения и может быть реализована без применения ЭВМ. Однако в условиях высокого уровня параметрических возмущений она обладает недостаточной точностью, так как в ней отсутствуют цепи стабилизации коэффициента передачи разомкнутой системы.
Указанный недостаток отсутствует в самонастраивающейся системе комбинированного регулирования [2], включающей последовательно соединенные измеритель рассогласования, регулятор, первый блок умножения, первый сумматор и объект управления, последовательно соединенные первый, второй, третий и четвертый логические блоки, последовательно соединенные второй сумматор, блок деления, управляемый ключ, блок памяти и первый блок умножения, последовательно соединенные первый блок дефференцирования и второй блок выделения модуля, последовательно соединенные второй блок дифференцирования и третий блок выделения модуля. Система включает также первый и четвертый блоки выделения модуля, третий блок умножения, датчик внешнего возмущения. Выход объекта подключен к второму инверсному входу измерителя рассогласования, выход которого подключен к входу первого блока дифференцирования, к входу первого блока выделения модуля, выход которого соединен с вторым входом второго логического блока. Выход первого блока дифференцирования подключен к входу второго блока дифференцирования. Выход второго блока выделения модуля соединен с вторым входом третьего логического блока. Выход третьего блока выделения модуля подключен к второму входу четвертого логического блока, выход которого соединен с вторыми входами управляемого ключа и регулятора, второй выход которого подключен через третий блок умножения к второму инверсному входу второго сумматора, первый вход которого соединен с выходом первого сумматора. Выход первого блока умножения соединен с вторым входом первого сумматора. Выход блока памяти подключен к вторым входам второго и третьего блоков умножения. Выход первого блока умножения через четвертый блок выделения модуля соединен с вторым входом первого логического блока. Основное внешнее контролируемое воздействие поступает на второй вход объекта и вход датчика, выход которого соединен с вторыми входами блока деления и первого блока умножения. На первый вход первого логического блока поступает управляющий сигнал, на первый вход измерителя рассогласования - сигнал задания, на третьи входы первого, второго, третьего и четвертого логических блоков подаются задающие воздействия. Неконтролируемое воздействие поступает на третий вход объекта.
Рассматриваемая система автоматического регулирования (САР) содержит разомкнутый и замкнутый контуры управления, а также цепи самонастройки коэффициентов передачи разомкнутого контура и разомкнутой системы. Эта система является простой и надежной. Она обеспечивает высокое качество стабилизации выходного параметра в условиях нестационарности объекта управления, высокого уровня контролируемых и неконтролируемых шумов. Это достигается стабилизацией коэффициентов передачи разомкнутого контура и разомкнутой системы.
Однако известная система не может обеспечить необходимого качества регулирования объектов с редкоизмеряемым выходом. Существует класс технологических процессов, имеющих на входе два входных воздействия в виде дозировок сырья и реагента, причем содержание в сырье и реагенте компонентов, влияющих на величину выходного параметра, является переменным. При этом контроль выходного параметра является дискретным в силу либо сложности непрерывного определения этого параметра, отсутствия автоматических датчиков непрерывного действия и применения дискретных датчиков, либо в силу применения для этой цели периодически выполняемых лабораторных анализов. Рассматриваем такой класс объектов, контроль выходного параметра которых осуществляется с дискретностью, равной или превосходящей время переходного процесса, что чаще всего и бывает на практике в случае дискретных (особенно не автоматических) измерений.
Самонастройка САР нестационарного объекта, принадлежащего к указанному классу, не может быть с необходимым качеством выполнена при использовании блока самонастройки, примененного в системе [2]. Это имеет место в связи с тем, что указанная специфика рассматриваемого класса объектов вызывает потребность в целях обеспечения работоспособности блока самонастройки смены критерия адаптации системы.
Отсутствие информации о поведении выходного параметра в интервале дискретности его измерения и, следовательно, отсутствие возможности оперативного воздействия на его текущие значения на этом интервале посредством обратной связи в условиях нестационарности объекта, высокого уровня контролируемых и неконтролируемых шумов может привести к значительным ошибкам регулирования. Поэтому выходной сигнал регулятора как информационная основа критерия самонастройки становится недостаточно надежной. Таким образом, блок самонастройки САР по [2] решить задачу самонастройки с необходимым качеством при управлении ТП указанного класса не может.
Цель изобретения - повышение точности регулирования нестационарных объектов, функционирующих в условиях высокого уровня контролируемых и неконтролируемых шумов при редкоизмеряемом выходе объекта.
Цель достигается тем, что в систему введены второй, третий и четвертый управляемые ключи и второй блок памяти, вход которого подключен к выходу второго управляемого ключа, а выход - к информационному входу третьего управляемого ключа, выход которого подключен к вычитающему входу второго сумматора, а управляющий вход - к управляющим входам второго и четвертого управляемых ключей и к выходу блока самонастройки, второй вход которого подключен к управляющему выходу объекта управления, третий вход которого подключен к выходу второго сумматора, суммирующий вход которого подключен к третьему входу корректирующего фильтра. Второй вход первого сумматора подключен к выходу четвертого управляемого ключа, информационный вход которого подключен к выходу второго блока умножения. Причем в блок самонастройки введены последовательно соединенные пятый блок формирования управляющего сигнала и третий сумматор, последовательно соединенные шестой блок формирования управляющего сигнала и четвертый сумматор, последовательно соединенные седьмой блок формирования управляющего сигнала и восьмой блок формирования управляющего сигнала. Введен также блок задержки, вход которого является первым входом блока самонастройки и подключен к входу блока выделения модуля и к вторым входам пятого и седьмого блоков формирования управляющего сигнала, второго, шестого и восьмого блоков формирования управляющего сигнала, а выход - к первым входам первого блока формирования управляющего сигнала и четвертого блока формирования управляющего сигнала, вторые входы которых соединены и являются вторым входом блока самонастройки, а выходы подключены соответственно к первым входам пятого и второго блоков формирования управляющего сигнала, седьмого и шестого блоков формирования управляющего сигнала. Выход восьмого блока формирования управляющего сигнала подключен к второму входу четвертого сумматора, выход которого подключен к второму входу третьего сумматора, третий вход которого подключен к выходу третьего блока формирования управляющего сигнала, а выход является выходом блока самонастройки. К задающим входам пятого и седьмого блоков формирования управляющего сигнала, шестого и восьмого блоков формирования управляющего сигнала подключены сигналы задания. В корректирующий фильтр введен второй блок памяти, выход которого подключен к второму входу блока деления, а вход является третьим входом корректирующего фильтра.
Указанная новая совокупность блоков и система связей позволяют обеспечить работоспособность блока самонастройки в условиях редкоизмеряемого выхода объекта, т.е. расширить область применения самонастраивающейся системы комбинированного регулирования и, обеспечив адаптацию САР в новых условиях, повысить точность системы регулирования.
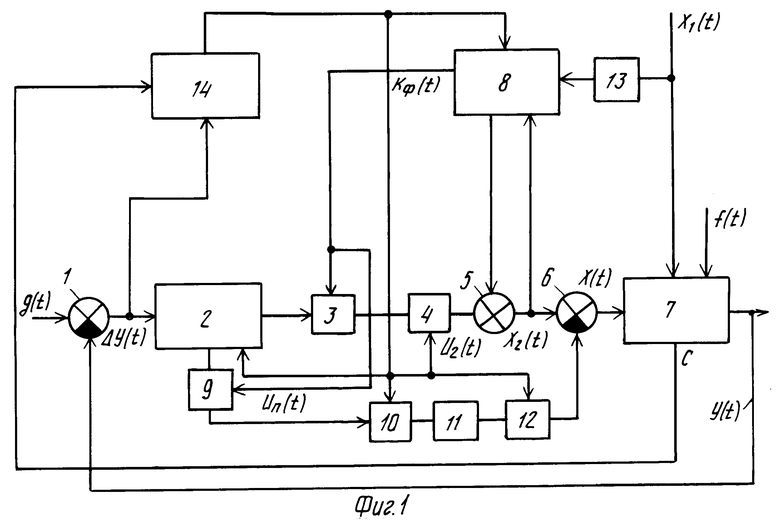
На фиг. 1 представлена схема предлагаемой самонастраивающейся системы комбинированного регулирования; на фиг.2 - структурная схема этой системы; на фиг.3 - схема блока формирования управляющего сигнала; на фиг.4 - принципиальная схема пневматического ПИ-регулятора; на фиг.5 - форма изменения дискретно измеряемого выходного параметра (первый выход объекта) и вид управляющего сигнала (второй выход объекта управления); на фиг.6 - блок-схема формирования информационного и управляющего выходных сигналов объекта управления.
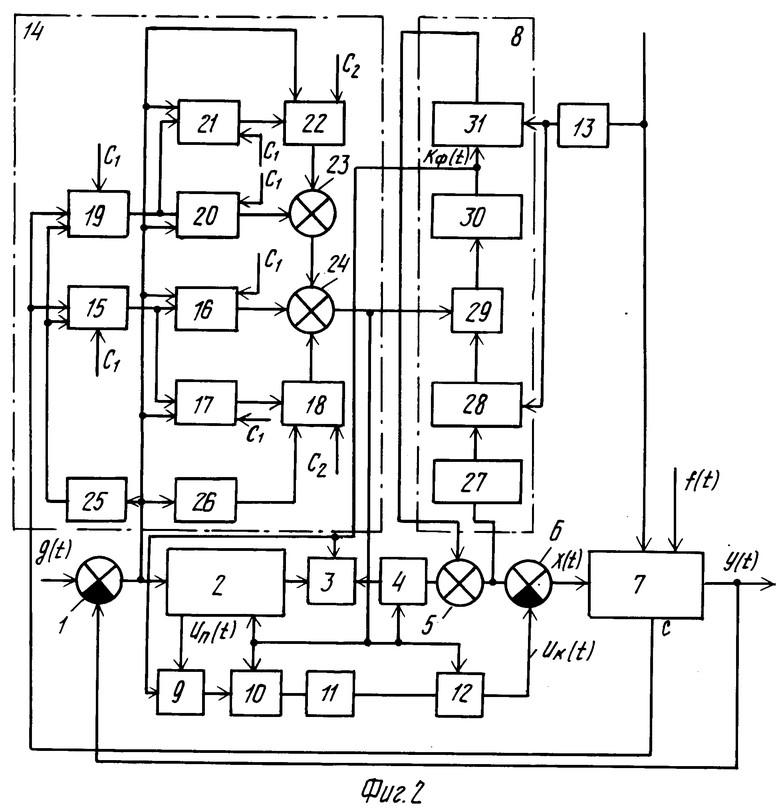
На фиг. 1 и 2 1 - измеритель рассогласования, 2 - регулятор, 3 - блок умножения, 4 - управляемый ключ, 5 и 6 - сумматоры, 7 - объект управления, 8 - корректирующий фильтр, 9 - блок умножения, 10 - управляемый ключ, 11 - блок памяти, 12 - управляемый ключ, 13 - датчик основного внешнего контролируемого возмущения, 14 - блок самонастройки, 15-22 - блоки формирования управляющего сигнала, 23 и 24 - сумматоры, 25 - блок задержки, 26 - блок выделения модуля, 27 - блок памяти, 28 - блок деления, 29 - управляемый ключ, 30 - блок памяти, 31 - блок умножения.
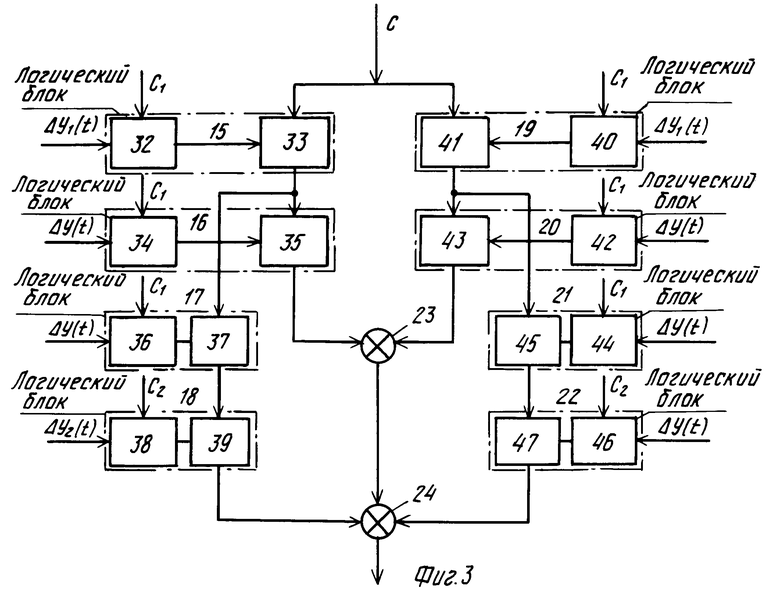
На фиг. 3 32- компаратор, 33 - управляемый ключ, 34 - компаратор, 35 - управляемый ключ, 36 - компаратор, 37 - управляемый ключ, 38 - компаратор, 39 - управляемый ключ, 40 - компаратор, 41 - управляемый ключ, 42 - компаратор, 43 - управляемый ключ, 44 - компаратор, 45 - управляемый ключ, 46 - компаратор, 47 - управляемый ключ.
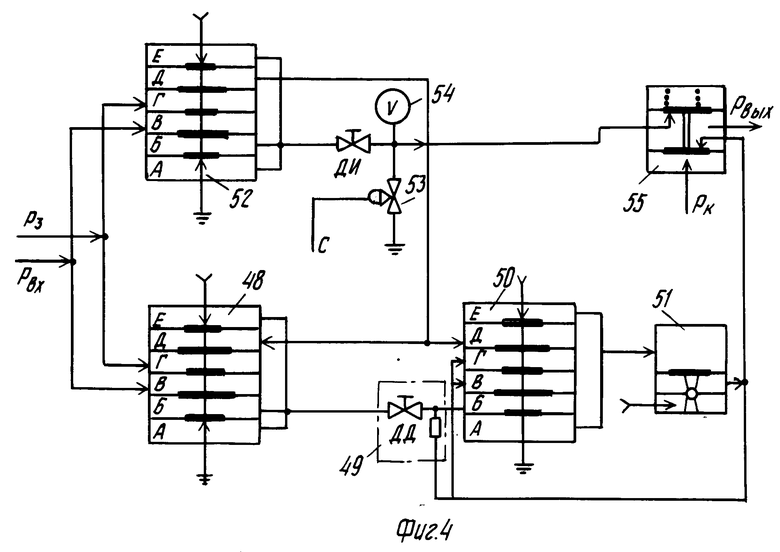
На фиг. 4 48 - элемент сравнения, 49 - дроссельный сумматор, 50 - элемент сравнения, 51 - усилитель мощности, 52 - элемент сравнения, 53 - запорный клапан, 54 - емкость, 55 - отключающее реле.
На фиг. 6 56 - преобразователь, 57 - управляемый ключ, 58 - аналоговое запоминающее устройство, 59 - блок дифференцирования, 60 - пороговый элемент, 61 - блок задержки, 62 и 63 - управляемые ключи.
На фиг. 1-6 g(t) - задающее воздействие, ΔY(t) - отклонение выходного сигнала объекта от уставки, С - управляющий сигнал, С1 и С2 - сигналы задания блоков формирования управляющего сигнала, X1(t) - основное внешнее контролируемое возмущение, U1(t) - выходной сигнал разомкнутого контура , U2(t) - выходной сигнал замкнутого контура, X2(t) - суммарный управляющий сигнал разомкнутого и замкнутого контуров, X(t) - входной сигнал объекта управления, Uп(t)-П-составляющая выходного сигнала регулятора, Uк(t) - сигнал коррекции входа объекта, U(t) - выходной сигнал объекта управления, f(t) - неконтролируемое возмущение, Кф(t) - выходной сигнал третьего блока 30 памяти; Δ Y(t- τ ) - выходной сигнал блока 25 задержки, ΔY1(t) - выходной сигнал блока 26, Рз - сигнал, пропорциональный текущему значению Y(t), Рк - командный сигнал, DD - регулируемый дроссель, DU - регулируемый дроссель, Рвых - выходной сигнал регулятора, Yп - входной сигнал преобразователя.
Система (фиг.2) состоит из разомкнутого контура управления по возмущению, замкнутого контура управления по отклонению, цепей самонастройки разомкнутого контура, цепей стабилизации коэффициента передачи разомкнутой системы, цепей коррекции управляющего сигнала.
В системе последовательно соединены измеритель 1 рассогласования, регулятор 2, второй блок 3 умножения, четвертый управляемый ключ 4, первый сумматор 5, второй сумматор 6, объект 7 управления, последовательно соединены третий блок 9 умножения, второй управляемый ключ 10, третий блок 11 памяти, третий управляемый ключ 12, последовательно соединены первый блок 15 формирования управляющего сигнала, второй блок 17 формирования управляющего сигнала, третий блок 18 формирования управляющего сигнала, последовательно соединены четвертый блок 19 формирования управляющего сигнала, седьмой блок 21 формирования управляющего сигнала, восьмой блок 22 формирования управляющего сигнала, четвертый сумматор 23, третий сумматор 24, последовательно соединены второй блок 27 памяти, блок 28 деления, четвертый управляемый ключ 29, первый блок 30 памяти, третий блок 31 умножения.
Выход измерителя 1 рассогласования подключен к входам блока 25 задержки, блока 26 выделения модуля и к вторым входам пятого 16, второго 17, шестого 20, седьмого 21 и восьмого 22 блоков формирования управляющего сигнала. Выход блока 25 задержки соединен с вторыми входами первого 15 и четвертого 19 блоков формирования управляющего сигнала. Выход блока 26 подключен к второму входу третьего блока 18 формирования управляющего сигнала, выход которого соединен с третьим входом третьего сумматора 24. Выход блока 15 соединен с первым входом блока 16, выход которого соединен с первым входом третьего сумматора 24, выход которого подключен к вторым (управляющим) входам четвертого 4, второго 10, третьего 12 и первого 29 управляемых ключей, а также к первому входу регулятора 2. Выход блока 19 подключен к первому входу шестого блока 20 формирования управляющего сигнала, выход которого соединен с первым входом четвертого сумматора 23. Первый информационный выход объекта 7 подключен к второму вычитающему входу измерителя 1 рассогласования, на первый вход которого подается задающее воздействие g(t). Второй выход регулятора 2 соединен с вторым входом третьего блока 9 умножения. Выход третьего управляемого ключа 12 соединен с вычитающим входом второго сумматора 6, выход которого подключен к входу второго блока 27 памяти. Выход первого блока 31 умножения соединен с входом первого сумматора 5. Основное внешнее контролируемое возмущение поступает на первый вход объекта 7 и вход датчика 13, выход которого соединен с первыми входами блока 28 деления и первого блока 31 умножения. Второй управляющий выход объекта 7 управления подключен к вторым входам первого 15 и четвертого 19 блоков формирования управляющего сигнала. На третьи задающие входы первого 15, пятого 16, второго 17, четвертого 19, шестого 20, седьмого 21 блоков формирования управляющего сигнала поступает сигнал задания С1. На третьи задающие входы блоков 18 и 22 подается сигнал задания С2. На второй вход объекта поступает неконтролируемое возмущение f(t).
Замкнутый контур регулирования содержит последовательно соединенные блоки 1,2,3,4,5,6,7, охваченные отрицательной обратной связью. Разомкнутый контур регулирования включает последовательно соединенные блоки 13, 8, 5, 6, 7. Выходными управляющими сигналами замкнутого и разомкнутого контуров являются соответственно сигналы U2(t) и U1(t). Цепи самонастройки разомкнутого контура (фиг.2) содержат блоки 14 и 29. Цепи самонастройки разомкнутой системы содержат блоки 14 и 3. Блок самонастройки включает в себя блоки 15-26. Цепи коррекции управляющего сигнала содержат блоки 9-12, 6.
Предлагаемая система решает задачу стабилизации выходного редкоизмеряемого параметра нестационарного объекта, функционирующего в условиях высокого уровня контролируемых и неконтролируемых шумов.
Система работает следующим образом.
Анализируют последовательно работу контуров системы. Разомкнутый контур формирует в блоке 28 деления сигнал отношения величин, пропорциональных входным переменным объекта. Сигнал отношения указанных величин через управляемый ключ 29 поступает в блок 30 памяти, выходной сигнал которого после умножения в блоке 31 на величину выходного сигнала датчика 13 поступает в сумматор 5 в виде выходного управляющего сигнала U1(t) разомкнутого контура. Сигналы, поступающие на входы блока 28 деления, пропорциональны на практике (применительно, например, к области химической технологии) дозировкам соответственно реагента и сырья. Поэтому отношение сигналов, поступающее в блок 30 памяти, пропорционально отношению дозировок реагента и сырья. Запись выходного сигнала блока 28 деления в блоке 30 памяти производится только в том случае, когда блок 14 самонастройки выдает управляющий сигнал С на открывание ключа 29. Выходной сигнал Кф(t) блока 30 памяти проходит затем через блок 31 умножения на величину, пропорциональную текущему значению дозировки сырья, и в виде выходного сигнала U1(t) поступает на второй вход сумматора 5. Таким образом, выходной сигнал датчика 13 умножается в фильтре 8 на некоторую величину Кф(t) (коэффициент передачи фильтра 8), которая между моментами самонастройки корректирующего фильтра 8 является величиной постоянной и хранится в блоке 30 памяти. При самонастройке фильтра 8 его коэффициент передачи изменяется скачкообразно, так как при наступлении следующего состояния адаптации новое отношение входных сигналов блока 28 деления, пропорциональное текущему соотношению дозировок реагента и сырья, пропускается через ключ 29 и запоминается в блоке 30 памяти. При работе системы все изменения величины X1(t) в определенном соотношении, равном коэффициенту передачи фильтра 8, отслеживаются величиной U1(t). Таким образом, корректирующий фильтр 8 представляет собой пропорциональное звено с переменным коэффициентом передачи, который имеет кусочно-постоянный характер.
Рассмотрим работу блока 14 самонастройки (фиг.2). Операции, выполняемые в блоках 15- 22,25,26, описываются следующими выражениями:
блок 15: Δ Y(t- τ ) ≥ C1;
блок 16: Δ Y(t) ≥C1;
блок 17: Δ Y(t)< C1;
блок 18: Δ Y2(t)< C2;
блок 19: ΔY(t- τ )< C1;
блок 20: Δ Y(t)< C1;
блок 21: Δ Y(t) ≥C1;
блок 22: Δ Y(t)< C2;
блок 25: Δ Y1(P) = ΔY(p) ˙e -pτ;
блок 26: ΔY2(t) = lΔ Y(t) l , где Δ Y1(p) и ΔY(p) - изображения по Лапласу величин ΔY1(t) и Δ Y(t);
e-pτ - передаточная функция блока задержки,
т.е. входом блока 25 задержки является величина Δ Y(t), а выходом - величина ΔY1(t) = ΔY(t -τ ). Величина задержки τ устанавливается равной дискретности измерения параметра Y(t). В блоках 25 и 26 формируются сигналы Δ Y1(t) и Δ Y2(t), которые используются при анализе в логических блоках 15-22.
Суть логического анализа, выполняемого в блоках 15-22, заключается в том, что по знаку и модулю отклонения от уставки g(t) текущего Y(ti) и предыдущего Y(ti-1) значений выхода объекта однозначно делается вывод о возможности адаптации системы автоматического регулирования.
Рассмотрим следующий случай. Пусть в моменты времени ti-1 и ti, отстоящие друг от друга на интервал дискретности измерения выхода объекта, имеют
ΔY(ti-1) ≥ 0 или g(ti-1) - Y(ti-1) ≥ 0
(1)
и ΔY(ti) ≥ 0 или g(ti) - Y(ti) ≥ 0 т.е. как в текущий (ti), так и предыдущий (ti-1) моменты времени значение выхода объекта меньше или равно величине задания g(ti-1), g(ti), т.е. в течение интервала времени между двумя последовательными измерениями выхода объекта замкнутый контур отрабатывает положительное отклонение ΔY(ti-1), увеличивая управляющий сигнал U2(t). При соблюдении условий (1) могут быть три случая:
Y(ti) < Y(ti-1);
Y(ti) = Y(ti-1); (2)
Y(ti) > Y(ti-1).
В любом из случаев (2) при соблюдении условий (1) можно сделать вывод о том, что объект находится в квазистатическом состоянии (переходный процесс завершен), при этом состояние равновесия объекта может иметь место на любом (в области допустимых значений) отклонении от уставки g(t), что характеризует степень интенсивности воздействия на выход объекта всей совокупности возмущающих факторов; прироста управляющего воздействия U2(t) не достаточно для устранения отклонения выхода объекта от уставки (об этом говорит справедливость условий (1), если исключить редкое состояние абсолютного равенства; новое соотношение сигналов  (пропорциональное отношению дозировок реагента и сырья) лучше отвечает текущим условиям движения объекта в данный момент (ti), чем соотношение
(пропорциональное отношению дозировок реагента и сырья) лучше отвечает текущим условиям движения объекта в данный момент (ti), чем соотношение  , так как разница в величинах этих отношений образована в результате целенаправленного воздействия на Y(t) при ti-1≅ t< ti путем увеличения U2(t) с целью устранения рассогласования ΔY(ti-1)
, так как разница в величинах этих отношений образована в результате целенаправленного воздействия на Y(t) при ti-1≅ t< ti путем увеличения U2(t) с целью устранения рассогласования ΔY(ti-1)
Таким образом, при соблюдении условий (1) целесообразно выполнить адаптацию разомкнутого и замкнутого контуров системы, записав в блок 20 памяти новое значение текущего отношения  . Это позволяет изменить коэффициент передачи фильтра 8 в соответствии с изменением коэффициента передачи объекта, имея цель стабилизации их произведения. Аналогично и в отношении коэффициента передачи разомкнутой системы.
. Это позволяет изменить коэффициент передачи фильтра 8 в соответствии с изменением коэффициента передачи объекта, имея цель стабилизации их произведения. Аналогично и в отношении коэффициента передачи разомкнутой системы.
Для случая
ΔY(ti-1) < 0 или g(ti-1) - Y(ti-1) < 0; (3)
ΔY(ti) < 0 или g(ti) - Y(ti) < 0 справедливы соображения, изложенные выше относительно условий (1) с поправкой лишь в данном случае на строгое неравенство в условиях.
В блоке самонастройки (фиг.2) заложены еще две ситуации, в которых самонастройка системы выполняется. Эти ситуации характеризуются тем, что отклонения текущего и предыдущего значений от уставки имеют разные знаки, однако модуль текущего отклонения от уставки не превышает некоторую заданную величину С2. Значение может быть определено, например, на основе величины погрешности измерителя параметра Y(t).
При появлении одной из четырех вышеописанных ситуаций и при наличии на первых входах блоков 15 и 19 управляющего сигнала С последний проходит через блок 14 и поступает на управляющие входы ключей 4, 10, 12 и 29. Управляющий сигнал С формируется измерителем выходного сигнала (на фигурах не показан) объекта 7. Этот измеритель (датчик) включен в состав объекта 7. Пример блок-схемы формирования информационного и управляющего выходных сигналов объекта 7 изображен на фиг.6.
В преобразователе 56 контролируемая физическая величина Yппреобразуется в некоторое пропорциональное значение сигнала другой физической природы (например, в электрический сигнал), которое проходит блок 59 дифференцирования и поступает на вход порогового элемента 60. Пороговый элемент 60 выдает на входы блоков 57, 58, 61, 62 управляющий сигнал в том случае, если выход блока дифференцирования достигает нулевого значения, т.е. если значение выходного сигнала преобразователя 56 достигает экстремума, то производится открывание ключа 57 и включение аналогового запоминающего устройства, которое с этого момента начинает интегрировать выходной сигнал преобразователя 56, запоминать результат и выдавать интегральное среднее в виде величины контролируемого параметра через первый информационный выход объекта. Выходной сигнал Y(t) имеет характерный вид, отображенный на фиг.5. Одновременно выходной сигнал порогового элемента 60 поступает на вход блока 61 задержки и управляющий вход ключа 62. При этом ключ 62 открывается и сигнал С поступает на вход ключа 63. Поскольку управляемый ключ 63 является нормально открытым (н.о.) ,то сигнал С проходит на выход этого ключа и поступает с второго управляющего выхода объекта 7 на первые входы блоков 15 и 19 формирования управляющего сигнала. По истечении времени задержки, формируемой блоком 61, управляющий сигнал с выхода порогового элемента 60 проходит блок 61 задержки и поступает на управляющий вход ключа 63, в результате чего ключ 63 закрывается. Управляющий сигнал С имеет вид импульсов, выдаваемых в моменты измерения ti, длительность которых настраивается изменением времени задержки блока 61. Длительность импульсов С определяется временем, требуемым для прохождения выходного сигнала блока 27 памяти до блока 30 памяти и записи в нем. В течение времени [ti-1, ti] между моментами измерения выходного параметра величина Y(t) остается постоянной и равной его значению, полученному в момент ti-1 (фиг.5).
Управляющий сигнал С, пройдя блок 14 самонастройки, поступает на управляющие входы ключей 4, 10, 12, 29. Ключи 4, 12 являются н.о., ключи 10, 29 - нормально закрытыми, т.е. при отсутствии сигнала С на управляющих входах ключи 4 и 12 открыты, ключи 10 и 29 закрыты. При отсутствии сигнала С на выходе блока 14 цепь самонастройки (фиг.2) параметров замкнутого и разомкнутого контуров (блоки 5, 27, 28, 29, 30) и цепь настройки величины корректирующего сигнала Uк(t) (блоки 2, 9, 10, 11) разомкнуты, прямая цепь (блоки 1, 2, 3, 4, 5, 6, 7) замкнутого контура и цепь коррекции сигнала Х(t) (блоки 11, 12, 6) замкнуты. При наступлении момента измерения величины Y(t) импульсный управляющий сигнал С поступает на вход блока 14 и проходит на его выход, если соблюдены условия адаптации (1), (3). При этом сигнал С открывает ключи 10 и 29, пропустив тем самым на запись в блоки 11 и 30 памяти соответственно новые значения сигналов Uп(t) и X2(t). Одновременно с этим закрываются ключи 4 и 12, прекращая поступление управляющего сигнала замкнутого контура U2(t) и сигнала коррекции Uк(t) на соответствующие входы сумматоров 5 и 6. Описанное состояние цепей сохраняется до тех пор, пока блок 61 задержки (фиг.6) не пропустит управляющий сигнал на вход ключа 63 и не закроет его, что ведет к обнулению второго выхода объекта 7 и, следовательно, к закрыванию ключей 10, 29 и открыванию ключей 4 и 12. На этом операция самонастройки системы завершена.
Введение ключа 4 в известную систему вызвано следующим. В известной системе в моменты самонастройки объект находится в состоянии квазистики, которое трактовалось там несколько иначе. Среди условий квазистики имелось ограничение на величину отклонения Δ Y(t) выхода объекта от уставки. Это ограничение вполне обосновано при управлении объектами с аналоговым датчиком выходного параметра. Отсутствие оперативной информации в цепи обратной связи в интервале между измерениями в случае редкоизмеряемого выхода в условиях высокого уровня шумов приводит к более значительным отклонениям от уставки при завершении переходного процесса. Этот момент существенный. Наличие более значительной П-составляющей выхода регулятора нельзя уже игнорировать при адаптации Кф(t), так как эта составляющая управления, значимая в его составе, становится значимой и в составе нового значения  . Адаптация Кф(t) без учета Uп(t) может привести к значительному снижению ее эффективности. Поэтому Uп(t) исключить из состава U2(t) в момент самонастройки, как это сделано в известной системе, нельзя. Наличие сигнала на первом входе сумматора 5, который может значительно отличаться от нуля, в момент самонастройки делает процесс самонастройки критичным к длительности подачи управляющего сигнала С на вход ключа 29. Это объясняется тем, что участок цепи между сумматорами 5 и 6 имеет положительную обратную связь, которая может искажать сигнал Х2(t), если длительность подачи сигнала С превышает время прохождения выходного сигнала блока 27 по цепи блоков 28, 29, 30, 31, 5. В известной системе при входном сигнале (первый вход сумматора 5), близко к нулю, искажение Кф(t) за счет суммирования гораздо менее значимо. Для исключения зависимости качества адаптации рассматриваемой системы от качества настройки длительности интервала времени выдачи сигнала С введен управляемый ключ 4. В момент самонастройки ключ 4 закрывается, обеспечивая равенство нулю сигнала на первом входе сумматора 5, исключая возможность искажения сигнала Х2(t) и, следовательно, Кф(t) в течение акта самонастройки фильтра 8. В рассматриваемой системе для исключения двойного суммирования Uп(t) в составах сигналов U1(t) и U2(t) введена цепь коррекции суммарного управляющего воздействия Х2(t). Корректирующий сигнал в интервале (ti-1, ti) равен значению Uп(ti), имеет кусочно-постоянный характер и поступает с выхода блока 11 памяти через ключ 12 на вход сумматора 6. Новое значение Uп(ti) записывается в блоке 11 памяти в момент самонастройки, поступая с второго выхода регулятора 2 на вход блока 11 через открытый при этом ключ 10. Для исключения возмущения входа объекта посредством Uк(t) в течение интервала времени самонастройки в цепи коррекции предназначен ключ 12, который при этом закрыт, т.е. сигнал Uк(t) поступает на второй, инверсный вход сумматора 6 только тогда, когда на первый его вход в составе сигнала U2(t) поступает сигнал Uп(t), который и нужно компенсировать, исключая двойное его суммирование, так как Uп(t) при самонастройке учтен через новое значение Кф(t) в составе выходящего сигнала U1(t) разомкнутого контура. Наличие ключей 4 и 12 делает самонастройку системы некритичной к длине импульса управляющего сигнала С.
. Адаптация Кф(t) без учета Uп(t) может привести к значительному снижению ее эффективности. Поэтому Uп(t) исключить из состава U2(t) в момент самонастройки, как это сделано в известной системе, нельзя. Наличие сигнала на первом входе сумматора 5, который может значительно отличаться от нуля, в момент самонастройки делает процесс самонастройки критичным к длительности подачи управляющего сигнала С на вход ключа 29. Это объясняется тем, что участок цепи между сумматорами 5 и 6 имеет положительную обратную связь, которая может искажать сигнал Х2(t), если длительность подачи сигнала С превышает время прохождения выходного сигнала блока 27 по цепи блоков 28, 29, 30, 31, 5. В известной системе при входном сигнале (первый вход сумматора 5), близко к нулю, искажение Кф(t) за счет суммирования гораздо менее значимо. Для исключения зависимости качества адаптации рассматриваемой системы от качества настройки длительности интервала времени выдачи сигнала С введен управляемый ключ 4. В момент самонастройки ключ 4 закрывается, обеспечивая равенство нулю сигнала на первом входе сумматора 5, исключая возможность искажения сигнала Х2(t) и, следовательно, Кф(t) в течение акта самонастройки фильтра 8. В рассматриваемой системе для исключения двойного суммирования Uп(t) в составах сигналов U1(t) и U2(t) введена цепь коррекции суммарного управляющего воздействия Х2(t). Корректирующий сигнал в интервале (ti-1, ti) равен значению Uп(ti), имеет кусочно-постоянный характер и поступает с выхода блока 11 памяти через ключ 12 на вход сумматора 6. Новое значение Uп(ti) записывается в блоке 11 памяти в момент самонастройки, поступая с второго выхода регулятора 2 на вход блока 11 через открытый при этом ключ 10. Для исключения возмущения входа объекта посредством Uк(t) в течение интервала времени самонастройки в цепи коррекции предназначен ключ 12, который при этом закрыт, т.е. сигнал Uк(t) поступает на второй, инверсный вход сумматора 6 только тогда, когда на первый его вход в составе сигнала U2(t) поступает сигнал Uп(t), который и нужно компенсировать, исключая двойное его суммирование, так как Uп(t) при самонастройке учтен через новое значение Кф(t) в составе выходящего сигнала U1(t) разомкнутого контура. Наличие ключей 4 и 12 делает самонастройку системы некритичной к длине импульса управляющего сигнала С.
Сигнал С, поступая в момент самонастройки на второй вход регулятора 2, обнуляет И-составляющую управляющего воздействия, сформированного этим регулятором. Пусть для конкретности регулятор реализует ПИ-закон регулирования (Д-составляющая в законе регулирования в условиях редкоизмеряемого выхода не имеет смысла):
U2(t)=  B1ΔY(t)+B2
B1ΔY(t)+B2 Y(τ)d
Y(τ)d Kф(t) (4) где В1, В2 - настраиваемые параметры регулятора.
Kф(t) (4) где В1, В2 - настраиваемые параметры регулятора.
В результате самонастройки фильтра 8 и обнуления И-составляющей U2(t) определяется следующим выражением:
U2(t) = B1 ˙Δ Y(t) ˙Кф(t) . (5)
Очевидно, что переход системы на новое значение коэффициента передачи корректирующего фильтра 8 не вызывает возмущения входного сигнала X(t) объекта 7. Действительно в результате самонастройки величина U2(t) через Кф(t) входит в состав сигнала U1(t).
От сигнала U2(t), имевшего вид (4) до момента самонастройки, остается величина, описываемая формулой (5), которая скомпенсирована в сумматоре 6 сигналом Uк(t), равным по модулю и имеющим обратный величине U2(t) знак.
Таким образом, самонастройка разомкнутого контура приводит к тому, что в состояниях квазистики, имеющих место при поступлении каждого нового результата измерения выхода Y(t) объекта 7 ( рассматривают такой класс объектов, переходные процессы в которых по длительности меньше или равны дискретности измерения выходного параметра), вход объекта X(t) полностью определяется разомкнутым контуром, т.е. при последующих изменениях основного внешнего контролируемого возмущения X1(t) качество компенсации его на входе объекта посредством Y1(t) повышено благодаря самонастройке Кф(t). При этом та часть возмущений, которая до этого проходила через объект, увеличивала дисперсию выходного параметра и нагружала обратную связь, компенсируется на его входе. На входы блоков 15-17, 19-21 формирования управляющего воздействия поступает сигнал задания С1, на входы блоков 18 и 22 - сигнал задания С2. Можно величину задания С1 положить равной нулю, а С2 - модулю предельной абсолютной погрешности измерителя параметра Y(t).
Цепи стабилизации коэффициента передачи разомкнутой системы включают блоки 15-24, 3 и соответствующие им связи.
Обозначают Коб(t) - нестационарный коэффициент передачи объекта 7, Крег - коэффициент передачи регулятора 2, Крс - коэффициент передачи разомкнутой системы.
В целях удобства описания задачи блок 3 умножения представляют в виде усилителя, переменный коэффициент передачи которого заменяет первый входной сигнал блока 3.
Задача стабилизации Крс(t) может быть сформулирована:
Кмин≅ Коб(t) ≅ Кмакс;
Крег = const;
Крс(t) = Крег ˙Кф(t) ˙Коб(t);
К1 ≅ Крс(t) ≅ К2, где Кмин, Кмакс - предельные значения Коб(t);
К1, К2 - предельные значения величины Крс(t).
Требуется обеспечить К2 - К1 < δ2 , где δ2 - некоторое заданное положительное число.
Покажем формально, что цепи самонастройки величины Крс(t), использованные в составе рассматриваемой системы, позволяют решать указанную задачу. Пусть ti(i = =1,2,...,n, ...) - моменты поступления результатов измерений величины Y(t) на второй вход измерителя рассогласования. Для момента ti
Крк(ti) = Коб(ti) ˙Кф(ti), где Крк(ti) - коэффициент передачи разомкнутого контура системы.
Для момента ti+1 Коб(ti+1) = Коб(ti) ˙τ1 , где τ1 - некоторая положительная величина.
Тогда
Крк(ti+1) = Коб(ti) ˙τ1 ˙Кф(ti+1) .
В результате самонастройки коэффициента передачи фильтра 8 в момент ti+1
Кф(ti+1) ≃ Кф(ti) ˙ 1/τ1, т.е. в пределах допустимой погрешности система посредством блока 14 обеспечивает постоянство коэффициента передачи разомкнутого контура.
Следовательно,
Крк(ti+1) ≃ Крк(ti) .
Для разомкнутой системы в момент ti (при отсутствии блока 3)
Крс(ti) = Крег ˙Коб(ti).
Для момента ti+1
Крс(ti+1) = Крег ˙Коб(ti) ˙ τ1 .
Из сравнения последних двух выражений с учетом вышеприведенного выражения для Кф(ti+1) становится очевидным, что для стабилизации Крс(t) достаточно умножить ее на величину Кф(t).
После введения в систему блока 3 (фиг.2) можно записать для момента ti
Крc(ti) = Крег1 ˙Кф(ti) ˙Коб(ti), где Крег1 = Крег/Кф(ti), для момента ti+1 (в пределах допустимой погрешности самонастройки)
Крс(ti+1) ≃ Крег1 ˙Кф(ti)  Коб(ti) ˙τ1, т.е. Крс(ti+1) ≃ Крс(ti).
Коб(ti) ˙τ1, т.е. Крс(ti+1) ≃ Крс(ti).
Таким образом, использование указанных цепей самонастройки позволяет решить сформулированную выше задачу стабилизации величины Крс(t).
Предлагаемая самонастраивающаяся система комбинированного регулирования обладает новизной, так как в изобретении отсутствуют пятый, шестой, седьмой и восьмой блоки формирования управляющего сигнала, блок задержки, второй и третий блоки памяти, третий и четвертый сумматоры, третий блок умножения, второй, третий и четвертый управляемые ключи, а также соответствующие им связи.
Новая упорядоченная совокупность первого - восьмого блоков формирования управляющего сигнала в составе структуры блока самонастройки, соединенного входом с вторым выходом объекта и выходом с вторым, третьим, четвертым управляемыми ключами, а также наличие корректирующей цепи новой структуры, включающей третий блок умножения, второй, третий управляемые ключи, третий блок памяти, которая подключена соответствующими связями с выходом блока самонастройки и входом (через сумматор) объекта, наличие четвертого управляемого ключа в прямой цепи замкнутого контура и второго блока памяти в цепи самонастройки разомкнутого контура позволяют обеспечить достижение цели изобретения указанным способом применительно к объектам с редкоизмеряемым выходом. Следовательно, предлагаемая система соответствует критерию существенного отличия.
Рассматриваемая система автоматического регулирования может быть реализована программно на базе любого УВК (например, СМ-2М, а также агрегативно комплекса "Микродат" и т.д., если они имеются в составе АСУТП). Кроме того, рассматриваемую систему автоматического регулирования можно реализовать на базе технических средств государственной системы приборов и средств автоматизации. Логические блоки 15-22 можно реализовать, используя совокупность компараторов и управляемых ключей (фиг.2). На входы компараторов поступают сигналы С1, С2, ΔY1(t), Δ Y(t), ΔY2(t). Выходные сигналы компараторов поступают на управляющие входы ключей. На входы ключей 33 и 35 поступает с второго выхода объекта 7 управляющий сигнал С, который появляется на выходе блока самонастройки, т.е. сумматора 24 только при соблюдении условий адаптации. При этом имеют место (фиг.3) четыре суспензии, определяемые одновременным соблюдением ограничений, проверяемых в следующих наборах логических блоков: 15, 16; 15, 17, 18; 19, 20; 19, 21, 22.
В качестве компараторов можно использовать обычные операционные усилители. Однако лучше для целей сравнения сигналов использовать специально разработанные устройства, например полупроводниковые компараторы типов 521СА2, 521СА1 и др. (параметры и схемы их включения приведены Алексеенко А.Г., Коломбет Е.А., Стародуб Г.И. Пpименение прецизионных аналоговых ИС. - М. : Радио и связь, 1981, с. 168, 169, табл. 7.1), или компараторы, построенные на базе операционных усилителей (Алексеенко А.Г., Коломбет Е.А., Стародуб Г. И. Применение прецизионных аналоговых ИС. - М.: Радио и связь, 1981, с. 170, табл.7.2).
В качестве управляемых ключей 4, 10, 12, 29 (фиг.2), 22, 35, 37, 39, 41, 43, 45, 47 можно использовать электронные аналоговые ключи (Шило В.Л. Линейные интегральные схемы. - М.: Советское радио, 1979, с. 315, 328, их функциональные и принципиальные схемы приведены там же, с. 317, 319-322). Можно использовать аналоговые ключи в интегральном исполнении типов 1КТ901, 1КТ902, 1КТ082, а также ряд других (Шило В.Л., Линейные интегральные схемы. - М.: Советское радио, 1979, с. 323-328).
В качестве блока 59 дифференцирования (фиг.6) можно использовать блок динамических преобразований БДП-П, входящий в состав АКЭСР (Государственная система промышленных приборов и средств автоматизации. Часть 1: Номенклатурный каталог. - М., 1984, с. 51-52), или, например, дифференцирующий помехозащищенный субблок типа Ф5170 (БМАД1), входящий в состав СУПС (см. Государственная система приборов и средств автоматизации. Часть 1: Номенклатурный каталог. - М., 1984, с. 78), а также Боярченков М.А., Кербников Ф.И. , Раев В.К. и др. Магнитные решающие элементы. - М.: Советское радио, 1971, с. 181 и др.).
В качестве блоков деления 28, умножения 3,9 (фиг.2) можно использовать блоки вычислительных операций типов БВА-П комплекса АСЭКР, БВО-2 комплекса АКЭСР второй очереди, математический субблок типа Ф5178 (БМАУ1) комплекса СУПС и др. (Государственная система промышленных приборов и средств автоматизации. Часть 1: Номенклатурный каталог. - М., 1984, с. 49, 63).
В качестве измерителя рассогласования и сумматоров 5, 6, 23, 24 можно использовать блоки кондуктивного разделения и суммирования типа БКР1, вычислительных операций типа БВО комплекса АКЭСР(Государственная система промышленных приборов и средств автоматизации. Часть 1: Номенклатурный каталог, - М., 1984, с. 76) и др.
В качестве регулятора 2 можно использовать, например, регулирующие устройства типа РБА комплекса АКЭСР (Государственная система промышленных приборов и средств автоматизации. Часть 1: Номенклатурный каталог, - М., 1984, с. 82), а в пневматическом варианте регулятор ПРЗ.21 (Автоматические приборы и вычислительные системы: Справочное пособие./Под ред. Б.Д.Кошарского. - Л. : Машиностроение, Ленинградское отделение. 1976, с. 272-274) и др.
В качестве блоков 11, 27, 30 памяти (фиг.2) можно использовать устройства (Полевые транзисторы и интегральные микросхемы: Технический каталог./ ЦНИИ. - М.: Электроника. 1975, с. 85, рис. 20), а также устройства выборки и хранения (УВХ) (функциональные схемы одно- и двухкаскадных УВХ приведены Алексеенко А.Г., Коломбет Е.А., Стародуб Г.И. Пpименение прецизионных аналоговых ИС. - М.: Радио и связь, 1981, с. 179-182). Кроме того, блок памяти можно реализовать на базе средств комплекса "Микродат" с использованием элементов памяти КС54.05, КС54.07, КС54.08, КС54.09, КС54.34 (Государственная система промышленных приборов и средств автоматизации. Часть 1: Номенклатурный каталог. - М., 1984, с. 91-92) и др.
В качестве блока 26 выделения модуля можно использовать, например, субблоки вспомогательных функций и комплекса СУПС (Государственная система промышленных приборов и средств автоматизации. Часть 1: Номенклатурный каталог. - М., 1984, с. 81). Блоки выделения модуля можно реализовать также на основе схем (Марков С.И., Юсупов Р.М. Функциональные устройства простейших беспоисковых самонастраивающихся систем. - Л. : Энергия, Ленинградское отд-ние, 1970, с. 68-69, рис. 43, 44).
Пороговый элемент 60 (фиг.6) можно реализовать, например, так как показано в книге (Райзен С.С., Стефанович Т.Х. Магнитные усилители в электроприводе и автоматике. - М.: Энергия, 1970, с. 478. Аналоговое запоминающее устройство (блок 58, рис. 6) может быть реализовано так, как показано в книге Райзен С.С., Стефанович Т.Х. Магнитные усилители в электроприводе и автоматике. - М.: Энергия, 1970, с. 125. Блоки 25 и 61 задержки (фиг.2 и 6) можно реализовать различными способами. К ним относятся использование пассивных четырехполюсников, использование активных четырехполюсников (с применением операционных усилителей), использование запоминающих конденсаторов, использование магнитной записи (Коган Б.Я. Электронные моделирующие устройства и их применение для исследования систем автоматического регулирования. - М.: Государственное изд-во физ.-мат. литературы, 1959, с. 361-375). Кроме того, при реализации предлагаемой системы на базе УВМ (например, УВК СМ-2М и др.) блок запаздывания легко реализовать путем использования массива запаздывания, в первую ячейку которого информация записывается, а из последней считывается. При каждом вызове программы на выполнение организуется сдвиг информации в массиве от начала к его концу. Число ячеек запаздывания легко определить из соотношения
N =  , где N - требуемое число ячеек массива запаздывания;
, где N - требуемое число ячеек массива запаздывания;
τ - время запаздывания;
Н - дискретность работы программы (промежуток времени между двумя последовательными вызовами программы на выполнение).
Принципиальная схема блоков, осуществляющих запаздывание от 0,05 до 100 с, а также от 0,5 до 20 мин, приведены в книге Коган Б.Я. Электронные модулирующие устройства и их применение для исследования систем автоматического регулирования. - М.: Государственное изд-во физ. -мат. литературы, 1959, с. 367-373.
Сигналы заданий С, С1, С2, g(t) можно формировать, например, с помощью задатчиков комплекса СУПС (Государственная система промышленных приборов и средств автоматизации. Часть 1: Номенклатурный каталог. - М., 1984, с. 69).
На фиг. 4 приведена принципиальная схема пневматического ПИ-регулятора (Балакирев В.С., Софиев А.Э. Применение средств пневмо- и гидроавтоматики в химических производствах. - М., Химия, 1973, с. 41). Как это видно из приведенной схемы, для реализации операции обнуления интегральной составляющей ПИ-регулятора при самонастройке системы необходимо посредством клапана 53 соединить емкость 54 с атмосферой. Клапаном 53 управляет сигнал С. При самонастройке системы он поступает на клапан 53 и далее через некоторое время, определяемое временем задержки блока 61 (фиг.6), становится равным нулю, и клапан 53 закрывается. В качестве клапана 53 можно использовать элемент УСЭППА - одноконтактный клапан ПЗК.1 (Автоматические приборы, регуляторы и вычислительные системы: Справочное пособие./Под ред. Б.Д.Кошарского. - Л.: Машиностроение, Ленинградское отд-ние, 1976, с. 267). В книге Ялышев А. У., Разоренов О.И. Многофункциональные аналоговые регулирующие устройства автоматики. - М.: Машиностроение, 1981, с. 352, рис. 151, приведена электрическая схема регулятора типа РБА комплекса АКЭСР.
Для обнуления интегральной составляющей выхода регулятора необходимо в схеме интегратора шунтировать конденсатор Си, находящийся в цепи отрицательной обратной связи операционного усилителя А1, посредством электронного аналогового ключа. При самонастройке системы сигнал С (фиг.2) поступает на управляющий вход названного ключа, в результате чего происходит шунтирование конденсатора, и выходной сигнал интегратора становится равным нулю. Через промежуток времени, необходимый для прохождения сигналов по цепям корректирующего фильтра 8, в результате пропускания блоком задержки (фиг.6) управляющего сигнала на вход ключа 63 последний закрывается, выходной сигнал блока 14 самонастройки становится равным нулю, в результате чего отключается шунт конденсатора Си и завершена операция обнуления интегральной составляющей выходного сигнала регулятора 2 (фиг.2).
| название | год | авторы | номер документа |
|---|---|---|---|
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1511734A1 |
| Самонастраивающаяся система комбинированного регулирования | 1987 |
|
SU1509828A1 |
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1339494A1 |
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1388826A2 |
| Система автоматического управления | 1986 |
|
SU1409971A1 |
| КАСКАДНАЯ ДВУХКАНАЛЬНАЯ САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА КОМБИНИРОВАННОГО УПРАВЛЕНИЯ | 2006 |
|
RU2327196C1 |
| САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ | 2016 |
|
RU2616219C1 |
| Система автоматического управления | 1982 |
|
SU1113780A2 |
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1386957A1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2013 |
|
RU2541848C1 |
Изобретение относится к системам автоматического управления, в частности к самонастраивающимся системам автоматического регулирования. Система предназначена для регулирования нестационарных объектов с редкоизмеряемым выходом, функционирующих в условиях высокого уровня контролируемых и неконтролируемых воздействий. Цель изобретения - повышение точности регулирования. Система содержит регулятор, сумматоры, измеритель рассогласования, блок самонастройки, корректирующий фильтр, блоки умножения, управляемые ключи, блок памяти. Разомкнутый контур управления системы предназначен для компенсации контролируемых возмущений. Замкнутый контур регулирования формирует управление на основе результирующего отклонения выхода объекта от уставки. Блок самонастройки системы предназначен для работы в условиях редкоизмеряемого выхода объекта. Он повышает качество работы обоих контуров системы за счет стабилизации их коэффициентов передачи. Цепи коррекции управляющего сигнала обеспечивают безударный режим адаптации системы. 6 ил.
САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА КОМБИНИРОВАННОГО РЕГУЛИРОВАНИЯ содержащая измеритель рассогласования, регулятор, первый и второй сумматоры, блок-самонастройки, корректирующий фильтр, первый и второй блоки умножения, датчик внешнего контролируемого возмущения, вход которого подключен к первому входу объекта управления и является входом внешнего контролируемого возмущения системы, а выход - к первому входу корректирующего фильтра, второй вход которого подключен к выходу блока самонастройки и к первому входу регулятора, первый выход - к первому входу первого сумматора, выход которого подключен к суммирующему входу второго сумматора, второй выход корректирующего фильтра подключен к первым входам первого и второго блоков умножения, вторые входы которых подключены соответственно к первому и второму выходам регулятора, второй вход которого подключен к первому входу блока самонастройки и к выходу измерителя рассогласования, вычитающий вход которого подключен к информационному выходу объекта управления, являющемуся выходом системы, а суммирующий вход является входом задания системы, второй вход объекта управления является входом неконтролируемого возмущения системы, причем блок самонастройки содержит последовательно соединенные первый, второй и третий блоки формирования управляющего сигнала, а также четвертый блок формирования управляющего сигнала, блок выделения модуля, выход которого подключен к второму входу третьего блока формирования управляющего сигнала, к задающим входам первого, второго и четвертого блоков формирования управляющего сигнала подключены сигналы задания, корректирующий фильтр содержит последовательно соединенные блок деления, управляемый ключ, первый блок памяти, блок умножения, выход которого является первым выходом корректирующего фильтра, вторым выходом которого является выход первого блока памяти, первым входом - второй вход блока умножения, подключенный к первому входу блока деления, а вторым входом - управляющий вход управляемого ключа, отличающаяся тем, что, с целью повышения точности регулирования, дополнительно введены первый, второй и третий управляемые ключи и блок памяти, вход которого подключен к выходу первого управляемого ключа, а выход - к информационному входу второго управляемого ключа, выход которого подключен к вычитающему входу второго сумматора, а управляющий вход - к управляющим входам третьего и первого управляемых ключей и к выходу блока самонастройки, второй вход которого подключен к управляющему выходу объекта управления, третий вход которого подключен к выходу второго сумматора, суммирующий вход которого подключен к третьему входу корректирующего фильтра, второй вход первого сумматора подключен к выходу третьего управляемого ключа, информационный вход которого подключен к выходу первого блока умножения, выход второго блока умножения подключен к информационному входу первого управляемого ключа, причем в блок самонастройки дополнительно введены последовательно соединенные пятый блок формирования управляющего сигнала и первый сумматор, последовательно соединенные шестой блок формирования управляющего сигнала и второй сумматор, последовательно соединенные седьмой и восьмой блоки формирования управляющего сигнала, а также блок задержки, вход которого является первым входом блока самонастройки и подключен к входу блока выделения модуля и к вторым входам пятого, седьмого, второго, шестого и восьмого блоков формирования управляющего сигнала, а выход - к первым входам первого и четвертого блоков формирования управляющего сигнала, вторые входы которых соединены и являются вторым входом блока самонастройки, а выходы подключены соответственно к вторым входам пятого, седьмого и шестого блоков, формирования управляющего сигнала, выход восьмого блока формирования управляющего сигнала подключен к второму входу второго сумматора, выход которого подключен к второму входу второго сумматора, выход которого подключен к второму входу первого сумматора, третий вход которого подключен к выходу третьего блока формирования управляющего сигнала, а выход является выходом блока самонастройки, к задающим входам пятого, седьмого, шестого и восьмого блоков формирования управляющего сигнала подключены сигналы задания, в корректирующий фильтр дополнительно введен второй блок памяти, выход которого подключен к второму входу блока деления, а вход является третьим входом корректирующего фильтра.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1386957A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
