Предметола изобретения является индукционный датчик вибрации с инерционной массой, точно центрированной относительно корпуса.
Известны индукционные датчики вибрации с применением инерционной массы в виде постоянного магнита, подвешенной на цилиндрических пружинах и перемещающейся относительно неподвижной катушки, расположенной в корпусе.
В описываемом ниже датчике, в отличие от известных, применено более совершенное устройство для подвен1ивания инерционной массы, улучшающее ее центрирование относительно корпуса и уменьшающее износ направляющих.
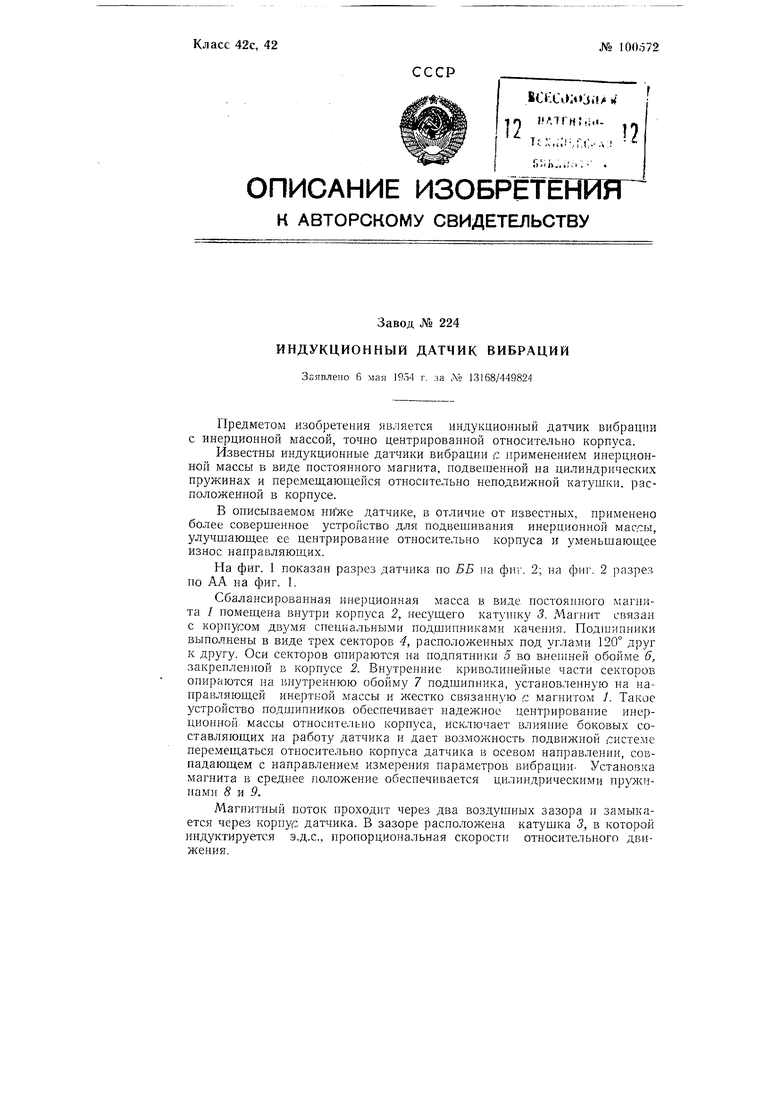
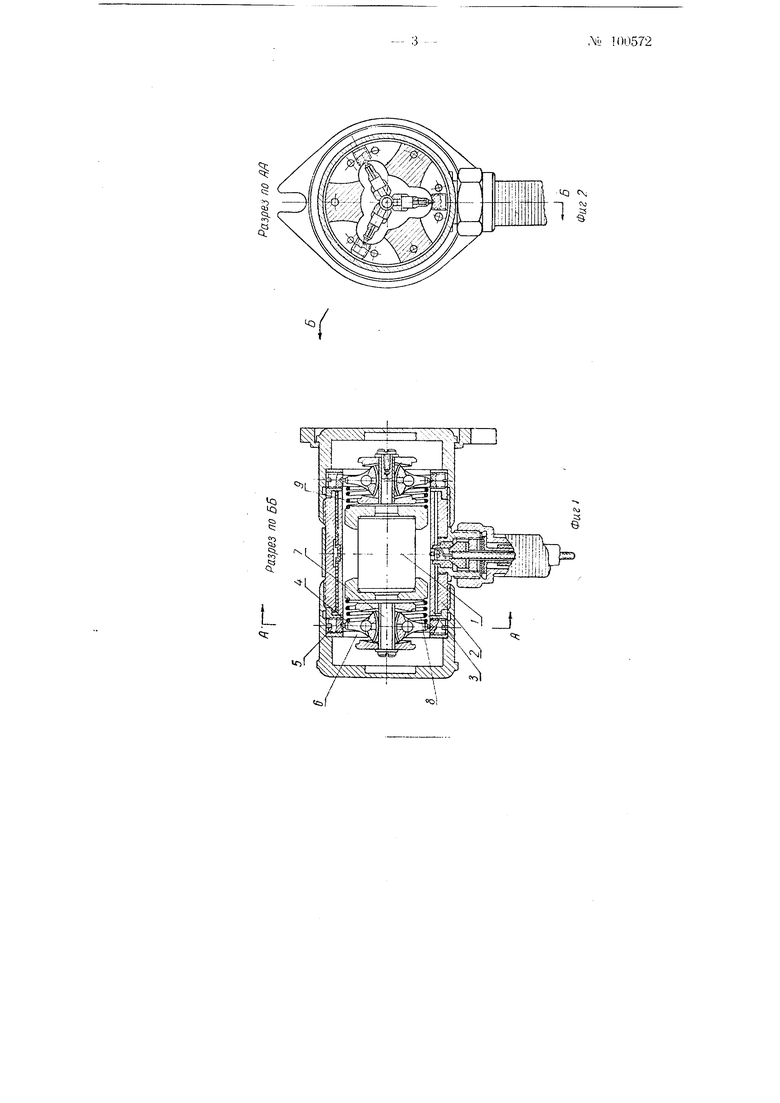
На фиг. 1 показан разрез датчика по ББ на фиг. 2; на фиг. 2 разрез по АЛ на фиг. 1.
Сбалансированная инерционная масса в виде постоянного магнита / помещена внутри корпуса 2, несущего катунгку 5. Магнит связан с корпусом двумя специальными подшипниками качения. Подшипники выполнены в виде трех секторов 4, расположенных под углами 120° друг к другу. Оси секторов опираются на нодпятпики 5 во внепшей обойме 6, закрепленной в корпусе 2. Внутренние криволинейные части секторов опираются на внутреннюю обойму 7 подшипника, установленную на направляющей ине 1тной массы и жестко связанную с магнитом /. Такое устройство подшипников обеспечивает надежное центрирование инерционной массы относите.аьно корпуса, исключает влияпие боковых составляющих на работу датчика и дает возмол ность подвижной системе перемещаться относительно корпуса датчика в осевом направлении, совпадающем с направлением измерения параметров вибрации- Установка магнита в среднее положение обеспечивается цилиндрическими пружинами 8 и 9.
Магнитный поток проходит через два воздушных зазора и замыкаетея через корпус датчика. В зазоре расположена катушка 3, в которой индуктируется э.д.с., пропорциональная скорости относительного движения.
,№ 100572
Предмет изобретения
Индукционный датчик вибраций с применением инерционной массы в виде постоянного магнита, подвешенной на цилиндрических пружинах и перемещающейся относительно неподвижной катушки, расположенной в корпусе, отл и q а ю щ и йся тем, что, с целью обеспечения надежного центрирования инерционной массы относительно корпуса и исключения влияния боковых составляющих колебаний на работу датчика, он снабжен подшипниками качения, выполненными в виде секторов, расположенных под углом 120° и опирающихся осью на внешнюю обойму, закрепленную в корпусе, а криволинейной частью на внутреннюю обойму, установленную на направляюн;ей инертной массы.
ja