Изобре-1-оние относится к цифровой электроизмерительной технике и предназначено для измерения параметров движения и использования в системах автоматического регулирования.
Известны цифровые измерители линейных перегрузок, работа которых происходит за два интервала времени, в течение первого из которых формируется число, пропорциональное угловой скорости, а в течение.второ го это число преобразуется в интервал времени, заполняемый выходной частотой импульсного датчика скорос Получается число, пропорциональное квадрату угловой скорости, и, соответственно, ли«ейному ускорению, содаваемому центробежной установкой. С целью обеспечения.соответствия цирового отсчета величине- линейного укорения при различных расстояниях центра тяжести испытываемого объект от оси вращения в измеритель введе блок уставки радиуса Cl
Недостатками этих измерителей являются пониженные точность и быст родействие, суженные функциональные возможности.
Наиболее близким по технической сущности к изобретению является измеритель, который содержит генерато эталонной и тактовой частот, импульный датчик скорости, выходы которых соединены с входами устройства управления, имеющего вход сигнала начала и конца интегрирования и три счетчика, выходы которых соединены с выходами устройства управления, а выход одного из них через блок устаки радиуса и другого непосредственно - с входами устройства управления. За счет введения в устройство генератора тактовой частоты и счетчика, в измерителе имеется цифровой отсчет, пропорциональный интегралу линейного ускорения C2J.
Недостатками известного измерите ля являются пониженные точность и быстродействие. Это объясняется тем, что измерение линейного ускорения и интеграла линейного ускорения в нем ведется аналогично измерению угловой скорости по частоте - заполнение заданного интервала времени импульсами выходной частоты датчика скорости. Достоинством такого измерения является пропорциональность выходной величины измеряемому параметру.
Противоположным является измерение угловой скорости по периоду заполнение периода выходной частоты датчика скорости импульсами эталонной частоты, достоинством которого являготся повышенные точность и быстродействие, а недостатком обратная пропорциональность выходной величины измеряемому параметру;
Действительно, в известном измерителе как в первом, так и во втором интервалах времени соответствующие числа формируются заполнением счетчиков выходными импульсами датчика скорости. Кроме того, необходимость двух интервалов времени для формирования чисел линейного ускорения и его интеграла также понижает точность и быстродействие известного измерителя. Формирование числа интеграла линейного ускорения в известном измерителе ведется последовательным сумг ированием за каждый такт чисел линейного ускорения. Погрешность дискретности полученного результата и в этом случае будет определяться на единичной младшего разряда, а в пределе - числом линейного ускорения, что дополнительно понижает точность измерения интеграла линейного ускорения.
Одним из важнейших параметров, характеризующих работу центробежных установок, является градиент линейного ускорения. Этот параметр известным устройством не измеряется что сужает его функциональные возможности .
Цель изобретения - повышение точности и быстродействия и расширение функциональных возможностей измерителя .
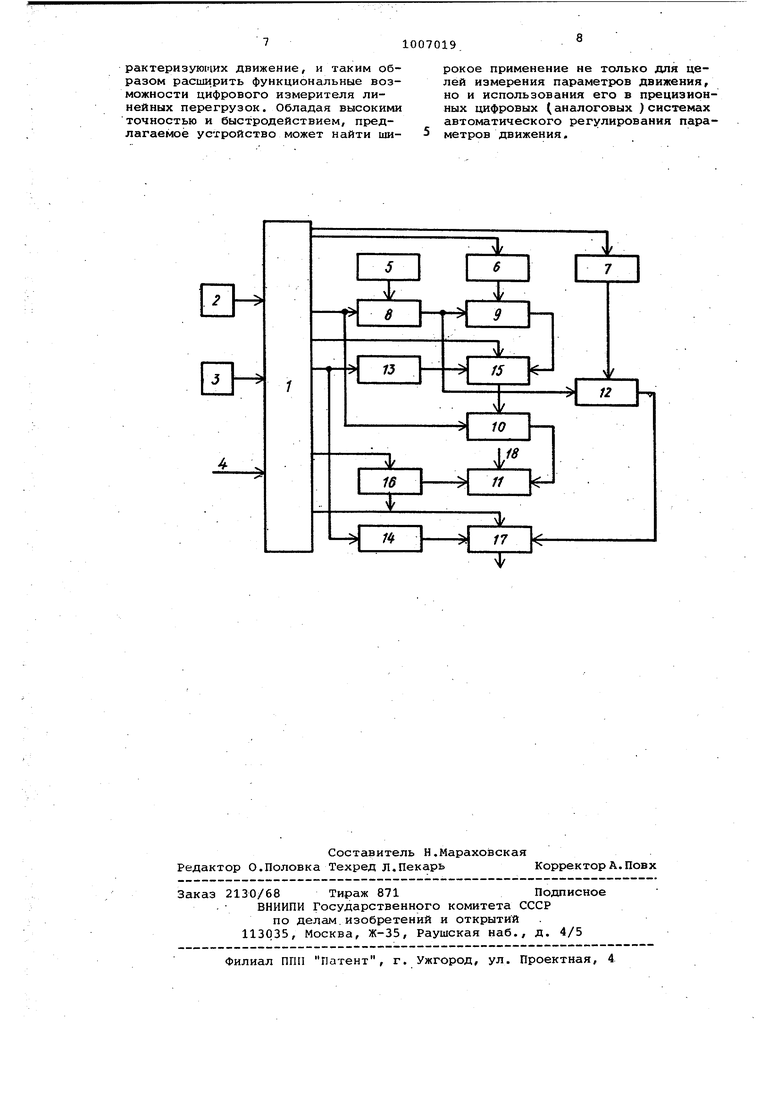
. Поставленная цель достигается тем что цифровой измеритель линейных перегрузок, содержащий генератор эталонной частоты и импульсный датчик скорости, выходы которых соединен с входами устройства управления, имещего вход сигнала начала и конца интегрирования, два счетчика, первые входы которых соединены с выходами устройства управления, и блок уставки радиуса, снабжен блоками измерения угловой скорости и ускорения входы которых соединены с выходами устройства управления, третьим счетчиком, первый вход которого соединен с выходом устройства управления, двумя делителями частоты, входы которых соединены между собой и с выходом устройства управления, а выходы - с третьими входами первого и третьего счетчиков, и пятью преобразователями Код - частота,один вход первого из которых соединен с выходом устройства управления и с одним входом третьего преобразователя, а выхо через второй и пятый преобразователи - с вторыми входами соответственно первого и третьего счетчиков, выход третьего преобразователя через четвертый преобразователь соединен с вторым входом второго счетчика, при этом другие входы преобразователей соединены соответственно: первого с выходом блока уставки радиуса. второго - с выходом блока измерения угловой скорости, третьего - с выхо дом первого счетчика, четвертого кодом соответствующего числа и пятого - с выходом блока измерения углового ускорения. На чертеже показана блок-схема предлагаемого измерителя. Измеритель содержит устройство 1 управления,генератор 2 эталонной частоты, импульсный датчик 3 скорости, вход 4 сигнала начала и конца интегрирования , блок 5 уставки радиуса, блок 6 измерения угловой скорости, блок 7 измерения углового ускорения, преобразователи 8-12 Ко частота, делители 13 и. 14 частоты счетчики 15-17 и вход 18 кода соответствующего числа. Выходы счетчиков 15-17 являются выходами измерителя . Входы устройства 1 управления, имеющего вход 4 начала и конца интегрирования, соединены с выходами генератора 2 эталонной частоты и импульсного датчика 3 скорости, а выходы - с входами блоков 6 и 7 измерения угловой скорости и ускорения и с первыми входами счетчиков 15 - 17, входы преобразователей 8 и 10 Код - частота соединены .между собой и с выходом устройства 1 управления, а выход пре образователя 8 через преобразователи 9 и 12 соединен с вторыми входами счетчиков 15 и 17, третьи входы которых через делители 13 и 14 частоты соединены между собой и с в ходом устройства 1 управления, выхо преобразователя 10 через преобразователь 11 соединен с вторым входом счетчика 16, при этом информационные входы преобразователей 8-12 сое динены соответственно с выходами бл ка 5 уставки радиуса, блока 6 измерения угловой скорости, счетчика 15 кода соответствующего числа и блока 7 измерения углового ускорения. Измеритель работает следующим об разом. На выходе блоков 6 и 7 с высоким точностью и быстродействием формируются числа угловой скорости и ускорения. Путем заполнения импульсами эталонной частоты f fj с выходами генератора 2 интервала времени Т пТ, кратного периоду Т(п - коэффициент кратности) следования импульсов с выхода датчика 3 скорости, в блоке б измеряется число периода Hf ff, Т fpn Т (п 1 T const). Подавая это число на информационный вход преобразователя Код - ана .лог, а на другой его вход частоту fo, получим на его выходе частоту f fjj (где Nf-- емкость счет чика преобразователя), период которой после деления ее на число п 2 пропорционален частоте с выхода-датчика 3 скорости и, следовательно, угловой скорости и. Поделив частоту fn на число К и заполняя полученный новый период KTg импульсами частоты f, получим на выходе блока 6 (учитывая что f Zto/2J7 ,где Z - число зубцов датчика скорости) число, пропорциональное угловой скорости, N ui ыкгЫт/2.л f0. Коэффициент К повышает точность преобразования, а его варьированием наиболее просто можно получить десятичный коэффициент кратности между W и Ыц,. Путем взятия разности результатов измерения числа за два соседних интервала времени Т с помощью реверсивного счетчика в блоке 7 формируетйшся число N,3.j -2Jf7 пропорциональное угловому ускорению. .В блоке 5 уставки радиуса содержится число NP RKp, пропорциональное радиусу R(KP - коэффициент пропорциональности|. Это число поступает на информационный вход преобразователя 8 Код - частота, на другой вход которого подается через устройство 1 управления эталонная частота f с выхода генератора 2. Выходная частота преоъразователя 8 fg (где Ng- емкость счетчика преобразователя 8, выбираемая равной максимальному числу Ир (). поступает на вход преобразователя 9, на информационный вход которого подается число NIJJ с выхода блока 6. Импульсы выходной частоты преобразователя 9 )/N8N9 (Де Ng емкость счетчика преобразователя 9, полагаем N9 Nfp) поступают на вход счетчика 15 и заполняют его в течение интервала времени К-|Т2. Это время определяется частотой fj, формируемой в блоке б (см.выше) и поступающей с выхода устройства 1 управления через делитель 13 частоты (с коэффициентом деления К,) на другой вход сче-рчика 15. Таким образом, на выходе счетчика 15 формируется число N u,2, пропорциоR(2Jffj2 нальное линейному ускорению , развиваемому центробежной установкой на расстоянии R от оси вращения. Разделив и умножив значение H) на ускорение силы тяжести д, получим i относительных единицах значение линейного ускорения. . ° OSKN Z C Коэффициент К повьшает точность преобразования, а его варьированием наиболее просто можно получить десятичный .коэффициент кратности между WQ и ,. Число Мц с выхода счетчика 16 ; поступает на информационный вход преобразователя 10 (регистр памяти числа М(л, для простоты на блок-схеме не показан), на другой вход которого подается эталонная частота fjj . Выходная частота преобразователя 10 f-,o ( кость счетчика преобразователя 10, полагаем N) через преобразователь 11 подается на вход счетчика 16, которым она интегрируется. С целью перевода относительных единиц линейного ускорения в абсолютные iм/с) необходимо обеспечить отношение, числа, находящегося на информационном входе преобразователя 11, к емкости его счетчика кратным (с коэффициентом кратности Kg . тогда получим число, формируемое на выходе счетчика 16. N , где t-) и 2 - время поступления си налов начала и конца интегрирования на вход 4 устройства управления.Соответственно по показанию Счетчика 16 определится значение интеграла л нейного ускорения V V 2. K kgKZ.o Алгоритм формирования числа, пропорционального градиенту линейного ускорения, в предлагаемом измерителе построен на основе его выражения dW/dt 2u Rdw/dt. Число Nduj/d С выхода блока 7 полается на информационный вход преобразователя 12, на другой вход которого поступает частота fд с выхода преобразователя S. Импульсы выходной частоты преобразователя 12 frt2° 8 aui/ai f2 ® Т емкость счетчика преобразователя 12, выбираемая равной максимальному числу (Мац,)т, поступают на вх счетчика 17 и заполняют его в течение интервала времени , Это время определяется частотой (как и при формировании числа t, поступаю щей с выхода устройства i управления через делитель 14 частоты с ко эффициентом деления Кз на другой вход счетчика 17. На выходе счетчика 17 формируется число , 2ujRaui/dt пропорциональное градиенту линейного ускорения dW/dt 2u Rduydt. Введя коэффициент дд(как и при определении WQ) по показанию счетчика 17 определим градиент линейного ускорения в относительных единицах о 2uiRai.j7di 3i Sfe (4) a«i/dt Коэффициент Kg повышает точность преобразования, а его варьированием наиболее просто получается десятичный коэффициент кратности между и,, i-,. Ndu,/at.° Отметим, что формирование числа |градиента линейного ускорения врз1можно и другим путем - взятием раз ности результатов измерения числа Njjjj за два соседних интервалов времени т (как и при формировании чис- ла Однако исследования показали, что точность измерения в этом случае почти на порядок ниже точности измерения с помощью предложенного алгоритма. Формирование чисел линейного ускорения и его градиента ведется одновременно с формированием чисел угловой скорости и ускорения в течение каждого заданного интервала времени измерения т , которым и определяется быстродействие предлагаемого -измерителя линейньох перегрузок,, превышающее на один и более порядков быстродействие известных измерителей. Точность измерения чисел линейного ускорения, его.градиента и интеграла обеспечивается заполнением Соответствующих интервалов времени (через преобразователи ) импульсами эталонной частоты и на один и более порядков превышает точность известных измерителей. Формирование интеграла линейного ускорения редется непрерывно между сигналами начала и конца интегрирования заполнением счетчика импульсами частоты, пропорциональной линейному ускорению, что дополнительно повышает точность предлагаемого 1 змерителя. Предложенный алгоритм позволил, используя имеющиеся возможности предлагаемого измерителя, простылда средствами и с высокими точностью и быстродействием обеспечить измерение градиента линейного ускорения, одного из важнейших параметров, характеризующих движение, и таким образом расширить функциональные возможности цифрового измерителя линейных перегрузок. Обладая высокими точностью и быстродействием, предлагаемое устройство может найти широкое применение не только для целей измерения параметров движения, но и использования его в прецизионных цифровых (аналоговых ) системах автоматического регулирования параметров движения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровой измеритель линейныхпЕРЕгРузОК | 1979 |
|
SU794544A2 |
| Цифровой измеритель линейных перегрузок | 1980 |
|
SU871077A2 |
| Цифровой измеритель линейных перегрузок | 1976 |
|
SU562776A1 |
| Устройство для измерения угловой скорости | 1978 |
|
SU726480A1 |
| СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЯ УГЛОВЫХ СКОРОСТЕЙ | 1995 |
|
RU2115129C1 |
| Цифровой регулятор | 1978 |
|
SU911458A1 |
| СПОСОБ НАЧАЛЬНОЙ АЗИМУТАЛЬНОЙ ВЫСТАВКИ СКВАЖИННОГО ПРИБОРА ГИРОСКОПИЧЕСКОГО ИНКЛИНОМЕТРА И АЗИМУТАЛЬНЫЙ МОДУЛЬ | 2012 |
|
RU2501946C2 |
| НАВИГАЦИОННО-ТОПОГРАФИЧЕСКИЙ ВНУТРИТРУБНЫЙ ИНСПЕКТИРУЮЩИЙ СНАРЯД | 2007 |
|
RU2321828C1 |
| Интегратор напряжения | 1980 |
|
SU962993A1 |
| Способ фазового управления асинхронным электродвигателем и устройство для его осуществления | 1978 |
|
SU928582A1 |
ЦИФРОВОЙ ИЗМЕРИТЕЛЬ ЛИНЕЙНЫХ ПЕРЕГРУЗОК, содержащий генера- тор эталонной частоты и импульсный датчик скорости, выходы которых соединены с входами устройства управления , имеющего вход сигнала начала и конца интегрирования, два счетчика, первые входы которых соединеры с выходами устройства управления, и блок уставки радиуса, отличающийся тем, что, с целью повышения точности и быстродействия и расширения функциональных возможностей, он снабжен блоками измерения угловой скорости и ускорения. Bxoj&d которых соединены с выходами устройстйа управления, третьим счет,чиком, первый вход которого соединен с выходом устройства управления двумя делителями частоты, входы которых соединены между собой и с вы ходом устройства управления, a выходы - с третьими входами первого и третьего счетчиков, и пятью преобразователями Код-частота, один вход первого из которых соединен с выходом устройства управления и с одним входом третьего преобразователя, a выход через второй и пятый преобразователи - с вторыми входами соответственно первого и третьего счетчиков, выход третьего преобразователя через четверней преобразо(Л ватель соединен с вторкм входом второго счетчика, при stoM другие с входы преобразователей соединены соответственно; первого - с выходом блока уставки радиуса, второго - с вы-, ходом блока измерения угловой скорости, третьего - с выходом первого счетчика, четвертого - с кодом со ответствующего числа и пятого - с выходом блока измерения углового ускорения.
| Цифровой измеритель линейных перегрузок | 1976 |
|
SU562776A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Авторское свидетельство СССР 694544, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
