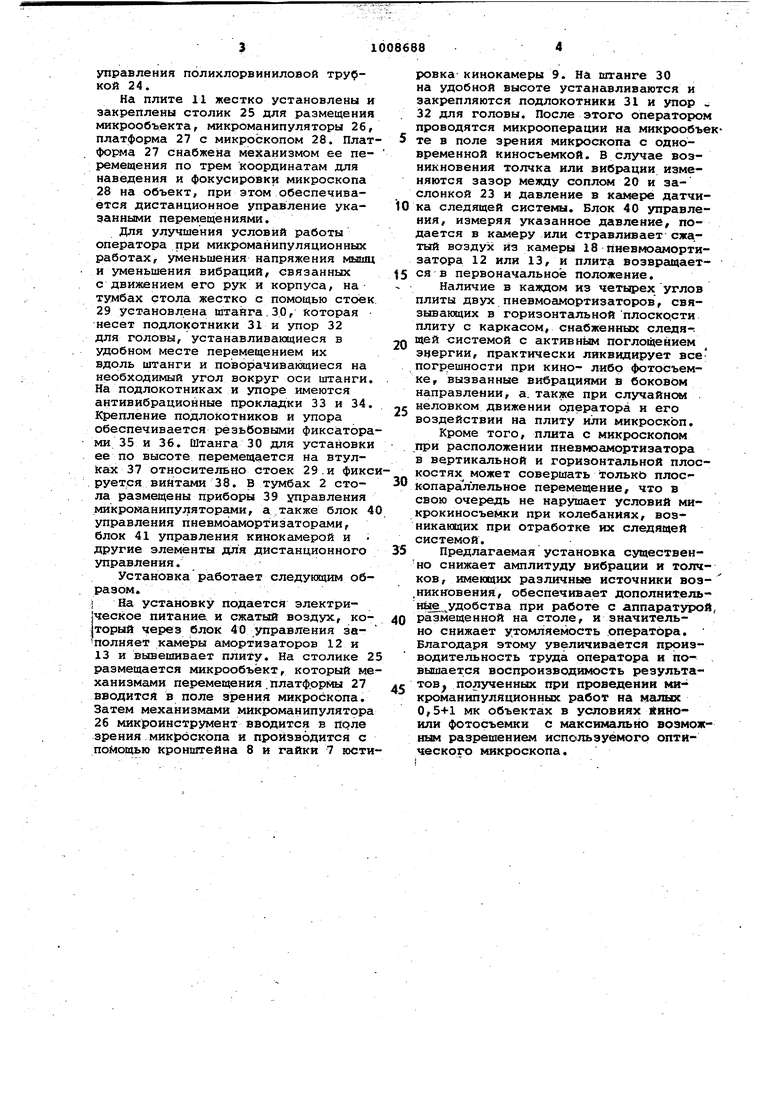
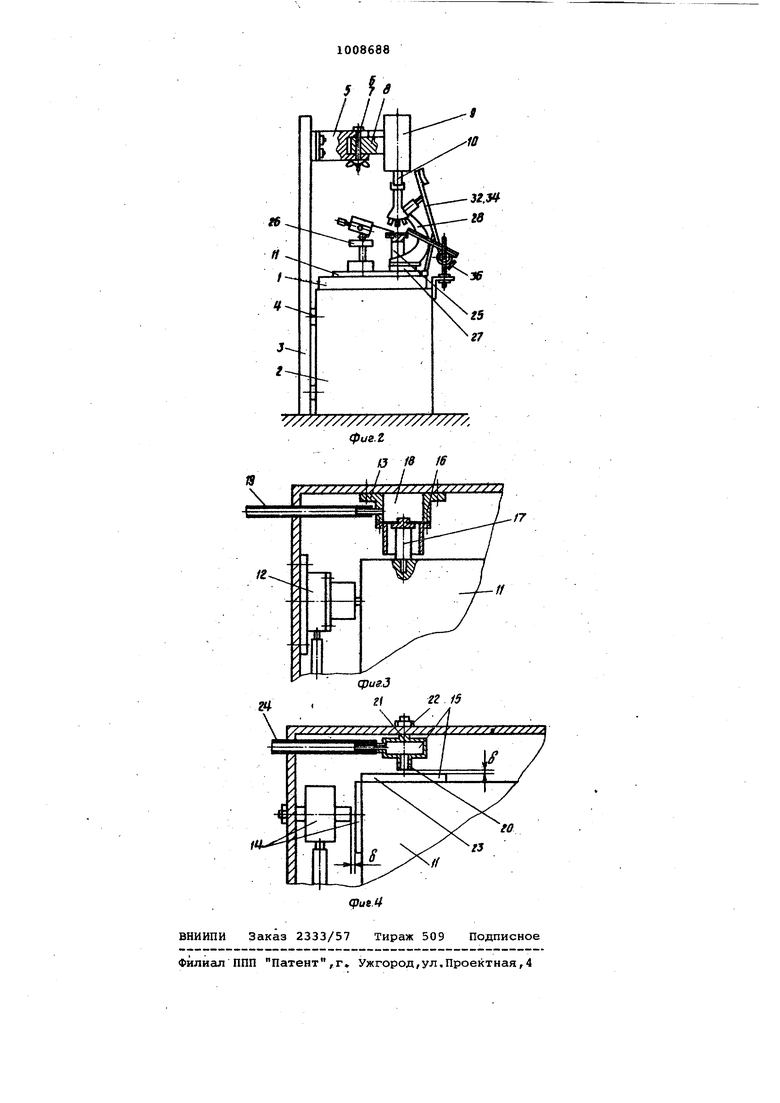
Изобретение относится к микроманипуляционной технике, а именно к устройствам для микрохирургических и ми сроманипуляционных прецизионных работ с микроскопическими объектами и может быть использовано в биологи и медицине для работы на изолированных клетках и тканях, в сельском хозяйстве, например ветеринарии для работы на изолированных яйцекле ках и эмбрионах с целью изменения н следственных признаков, а также в технике и радиоэлектронике для микросборочных работ. Известно устройство для микроманипуляционных работ, содержащее рабЬчий стол с пультом управления, имеющий плиту, которая установлена на упругих амортизаторах, выполненных из нескольких слоев листовой ре зины и поролона, размещенные на пли микроскоп и микроманипуляторы с микрридструментами l . Однако в данном устройстве связь плиты с рабочим столом через амортизационные прокладки не изолируют от различного рода сейсмических виб раций , от непосредственного контакт рук экспериментаторов с деталями ми кроскопа и микрринструментами, а та же от вибраций, вносимых пультами управления. Наиболее близкой к предлагаемой по технической сущности является установка для прец1 зионных работ с микрообъектами, содержащая антивибрационный стол с двумя тумбами и блоками управления в них, гилортизат ры со следящей системой, установлен ные между плитой стола и его каркасом, предметный столик для микрообъекта, микроскоп, размещенные на плите микроманипуляторы с рабочим микроинструментом, а также кинокаме ру для микросъемки.. Амортизаторы со следящей системо представляют собой пневмоустройства установленные с возможностью их раб ты в вертикальной плоскости 2 . Недостаток известной установки заключается в том, что при.работе экспе риментатора с микроскопом,кино .камерой и микроинструментами,расположеннБми на плите, возникают вибрации в горизонтальной плоскости. Этр не позволяет работать с -мелкими объектами и приборами высокого разрешения. Цель изобретения - повышение точ ности микроманипуляционных работ.. Указанная цель достигается тем, что в установке прецизионных работ с микрообъектами, содержащей антивибрационный стол с двумя тумбами и блоками управления в них, амортизаторы со следящей системой, : установленные между плитой стола и его каркасом, предметный столик для микрообъекта, микроскоп, размещенные на плите микроманипуляторы с рабочим микроинструментом, а также кинокамеру для микросъемки, на плите стола установлена подвижная платформа для креплений микроскопа, снабженная механизмом перемещения по трем координатам, а предметный столик для микрообъекта закреплен неподвижно на плите стола. Установка снабжена дополнительными амортизаторами со следящей системой, установленными между каркасом и плитой стола на ее торцах с возможностью работы в горизонтальной плоскости. Кроме того, установка снабжена подлокотниками и упором для головы, укрепленными на штанге, жестко связанной с тумбами стола. На фиг.1 показана установка для прези ионных работ с микрообъектами, вид спереди на фиг.2 - то же, вид .сбоку; на фиг.З - расположение и кон;струкция пневмоамортизаторов; на фиг.4 - устройство следящей системы с датчиками типа сопло-заслонка. Установка состоит из антивибрационного стола 1 с двумя тумбами 2 и рамой 3, которая жестко связана с каркасом стола. Тумбы 2 прикреплены к раме 3 через .антивибрационные прокладки 4. На раме жестко закреп- лен кронштейн 5, на которомс помощью оси б устанавливается и фиксируется гайкой 7 кронштейн 8 с кино- или фотокамерой 9 с объективом 10. На место кинокамеры может быть установлена телекамера для вывода изображения на экран монитора. На столе 1 размещена плита 11, которая связана с каркасом стола через четыре управляемых пневмоамортизатора 12 в вертикальной плоскости и восемь амортизаторов 13 в горизонтальной плоскости. Положение плиты определено следящей системой с датчиками типа сопло-зайлонка . Четыре датчика 14 установлены в вертикальной плоскости ,. а восемь датчиков 15 - в горизонтальной. Датчики и амортизаторы установлены в углах плиты (фиг.З и 4). Управляемые амортизаторы своим основанием 16 крепятся к каркасу стола, а жесткий центр мембраны 17 связан с плитой 11, Сжатый воздух в камеру 18 амортизатора подается от блока управления через полихлорвиниловую трубку 19. Камеры 20 датчиков 14 и 15 типа сопло-заслонка прикреплены с помощью резьбового стержня 21 и гайки 22 к каркасу стола 1 с обеспечением определенного зазора мезвду соплом камеры 20 и заслонкой 23, установленной на плите 11. Датчик соединяется с блоком
управления полихлорвиниловой 24.
На плите 11 жестко установлены и закреплены столик 25 для размещения микрообъекта, микроманипуляторы 26, платформа 27 с микроскопом 28. Платформа 27 снабжена механизмом ее перемацения по трем координатам для наведения и фокусировки микроскопа
28на объект, при этом обеспечивается дистанционное управление указанными перемещениями.
Для улучшения условий работы оператора при микроманипуляционных работах, уменьшения напряжения мышц и уменьшения вибраций, связанных с движением его рук и корпуса, на тумбах етола жестко с помощью стоек
29установлена штанга.30, которая несет подлокотники 31 и упор 32 для головы, устанавливающиеся в удобном месте перемещением их вдоль штанги и поворачивающиеся на необходимый угол вокруг оси штанги. На подлокотниках и упоре имеются антивибрациойные прокладки 33 и 34. Крепление подлокотников и упора обеспечивается резьбовыми фиксаторами 35 и 36. Штанга 30 для установки ее по высоте перемещается на втулках 37 относительно стоек 29.и фиксруется винтами 38. В тумбах 2 стола размещены приборы 39 управления микроманипуляторами/ а.также блок 4 управления пневмоамортизаторами, блок 41 управления кинокамерой и другие элементы для дистанционного управления.
Установка работает следующим образом.
j На установку подается электрическое питание, и сжатый воздух, который через блок 40 управления заполняет камеры амортизаторов 12 и 13 и вывешивает плиту. На столике 2 размещается микрообъёкт, который механизмами перемещения.платформы 27 вводится в поле зрения микроскопа. Затем механизмами микроманипулятора 26 микроинструмент вводится в прле зрения микроскопа и производится с помощью кронштейна 8 и гайки 7 юстировка кинокамеры 9. На штанге 30 на удобной высоте устанавливаются и закрепляются подлокотники 31 и упор 32 для головы. После этого оператором проводятся микрооперации на микрообъекте в поле зрения микроскопа с одновременной киносъемкой. В случае возникновения толчка или вибрации изменяются зазор между соплом 20 и заслонкой 23 и давление в камере датчика следящей системы. Блок 40 управления, измеряя указанное давление, подается в камеру или стравливает сжатый воздух из камеры 18 пневмоамортизатора 12 или 13, и плита возвращается в первоначальное положение.
Наличие в каждом из четырех углов плиты двух пневмоамортизаторов, связывающих в горизонтальной плоскости плиту с каркасом, снабженных следя-.
щей системой с активным поглощением
энергии, практически ликвидирует все; погрешности при кино- либр фотосъемке, вызванные вибрациями в боковом направлении, а. также при случаКнои .
неловком движении оператора и его воздействии на плиту или микроскоп. Кроме того, плита с микроскопом при расположении пневмоамортизатора в вертикальной и горизонтальной плоскостях может совершать только плоскопараллельное перемещение, что в свою очередь не нарушает условий микрокиносъеики при колебаниях, возникающих при отработке их следящей системой.
Предлагаемая установка существенно снижает амплитуду вибрации и толчков, имеющих различные источники воз.никновения, обеспечивает дополнительные.удобства при работе с аппаратурой,
размещенной на столе, и значительно снижает утомляемость .оператора. Благодаря этому увеличива1ется производительность труда оператора и повышается воспроизводимость результатов полученных при проведении микромаиипуляционных работ на малых 0,5+1 мк объектах в условиях йинонли фотосъемки с максимально возможным разрешением используемого оптического микроскопа.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для работ с микроскопическими объектами | 1982 |
|
SU1042734A1 |
| Установка для микроэлектродных исследований | 1987 |
|
SU1502006A1 |
| Устройство для манипуляций к микроскопу | 1983 |
|
SU1114187A1 |
| Микроманипулятор | 1983 |
|
SU1261789A1 |
| Микроманипулятор | 1982 |
|
SU1102669A1 |
| Устройство для проведения микроопераций на клетках и способ проведения микроопераций на клетках | 1981 |
|
SU1088171A1 |
| МИКРОМАНИПУЛЯТОР | 1933 |
|
SU38800A1 |
| Устройство управления ультразвуковым микроманипулятором | 1977 |
|
SU699465A1 |
| МИКРОМАНИПУЛЯТОР.2 | 1971 |
|
SU296565A1 |
| Микроманипулятор | 1935 |
|
SU46715A1 |
УСТАНОВКА ДЛЯ ПРЕЦИЗИОННЫХ РАБОТ С МИКРООБЬЕКТАМИ, содержащая антивибрационный стол с двумя тумбами И блоками управления в них, амор-тизаторы со следящей системой, установленные между ПЛИТОЙ стола и его каркасом, предметный столик для микрообъекта, микроскоп, размещенные на плите микроманипуляторы с рабочим микроинструментом, а также кинокамеру для микросъемки, отличающаяся тем, что, с целью повышения ТОЧНОСТИ микроманипуляционнык работ, на плите стола установлена подвижная платформа для крепления микроскопа, снабженная механизмом перемещения по трем координатам, а предметный столик для мйкрообъекта закреплен неподвижно наплите стола. 2.Установка по п.1, отличающаяся тем, она снабжена дополнительньми амортизаторами со следящей системой, установленными между каркасом и плитой стола на ее i торцах с возможностью работы в горизонтальной ПЛОСКОСТИ. «О 3.Установка по п.1, о т л ич аю щ а я с я тем, что она снабжена подлокотниками и упором для головы, укрепленными на штанге, жестко связанной с тумбами стола. сх сь 00 оо
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Проспект СКВ БП | |||
| АН СССР,- 1978 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Антивибрационный стбл для прецизионных работ на микроскопическом уровне | |||
| Проспект фирмы Backer-Loring Corporation, 1960 (прототип). | |||
