Изобретение относится к микроманипуляторам, обеспечивающим малые перемещения, и может быть использовано в устройствах, предназначенных для различных микроэлектродных и цитологических исследований клеток и тканей, а также в других областях науки и техники, где требуются незначительные, но точно контролируемые перемещения микроинструмента. Цель изобретения - сохранение целостности клеток при проколе их оболочки. На $иг. 1 представлен микроманипулятор, общий вид; на фиг. 2 жидкостный демпфер из легкоплавкого материала. Микроманипулятор содержит корпус 1, в котором располагается привод 2 скачкообразного перемещения инструмента 3. Привод представляет собой, например, пьезоэлектрические плйстины 4,расположенные между управляющими электродами 5, соединенными с блоком 6 управления. К приво ду 2 консольно прикреплен инструмен 3. Между инструментом 3 и корпусом в капиллярном зазоре расположен жидкостный демпфер 7 поперечных колебаний инструмента 3, вьшолненный из жидкости с управляемой вязкостью и поверхностным натяжением (т.е. эти параметры жидкости изменяются в зависимости от величины внешнего управляющего воздействия). На корпу се 1 микроманипулятора укреплен элемент 8 изменения состояния жидкостного демпфера 7, связанный с блоком 9 управления жидкостным дем фером.. В одном из вариантов выполнения устройства (фиг. 2) жидкостный дем фер 7 выполнен из легкоплавкого материала с вязкостью и. поверхност ным натяжением, зависящими от темп ратуры, например легкоплавкого припоя (легкоплавкие припои на основе галлия с температурой плавления 10-30 с или припои на основе висмута с индием с температурой пл ления 30-50°С) или легкоплавкого органического соединения (парафины смолы). При этом элемент 8 жидкост ного демпфера 7 выполнен в виде нагревательного и термочувствитель ного элементов 10 и 11 укрепленных на корпусе 1 микроманипулятора (вместо нагревательного элемента может быть установлена мIiниaтюpнaя термобатарея) . В другом варианте вьшолнения устройства жидкостный демпфер 7 может быть выполнен из магнитной жидкости, а элемент управления вязкостью жидкостного демпфера 7 - в виде электромагнита (или магнита), причем жидкостный демпфер 7 расположен в зоне действия магнитного поля электромагнита. Устройство работа ет следующим образом. На управляющие электроды 5 с блока 6 управления подается управляющее напряжение. Под действием управляющего напряжения пьезоэлектрические пластины 4 деформируются и перемещают инструмент 3. При подаче на управляющие электроды 5 скачкообразного импульса (например, в виде ступени) изменение размеров пьезоэлектрических пластин 4 происходит также скачкообразно. При этом происходит скачкообразное перемещение инструмента 3 со скоростью, необходимой для прокола клеточной оболочки без значительных деформаций клетки. При скачкообразном перемещении инструмента 3 возникают поперечные колебания инструмента из-за консольного крепления инструмента 3. Эти колебания гасятся жидкостный демпфером 7. Для обеспЁчения поперечных колебаний инструмента 3 на пьезоэлектрические пластины 4 подается переменное напряжение ультразвуковой частоты, которое возбуждают продольное колебание инструмента 3, При определенном соотношении между продольной частотой и частотой собственных поперечных колебаний инструмента 3 его форма становится динамически неустойчивой и возникают поперечные колебания (поперечные колебания описываются уравнением Матье). Амплитуда этих колебаний регулируется управляемым тормозящим усилием, действующим со стороны жидкостного демпфера 7 на инструмент 3. При выполнении элемента 8 (фиг. 2) в виде нагревательного 10 и термочувствительного 11 элементов и жидкостного демпфера 7 кз легкоплавкого материала с параметрами (вязкость, TfOBepxHocTHoe натяжение, плотность), зависящими от температу3ры, управляющим воздействием является изменение температуры жидкостного демпфера. Термочувствительный и нагревательный элементы вместе с блоком управления (задатчик темпера туры и регулятор температуры) обесп чивают задание и поддержание температуры демпфера в области температу ры с наиболее крутой зависимостью вязкости, поверхностного натяжения и плотности от температуры (например., в -области температуры плавления) . Задаваемое увеличение температуры уменьшает вязкость, поверхностное натяжение и плотность жидкостного демпфера 7, тем самым снижается тормозящее усилие, а следова тельно, увеличивается амплитуда поперечных колебаний микроинструмен та. Для уменьшения амплитуды поперечных колебаний температура жидкостного демпфера понижается, что ведет к увеличению вязкости, поверх ностного натяжения и плотности жидкости, а следовательно, к увеличению тормозящего усилия. Для работы с жидкостями, имеющими температуру кристаллизации ниже комнатной, и для снижения инерционности в предло женном устройстве вместо нагревательного элемента может применяться миниатюрная термобатарея, работающая по принципу Пельтье. Для фиксации микроинструмента в постоянном положении температура жидкостного демпфера становится ниже температуры перехода жидкости из жидкой фазы в твердую (т.е. ниже, например, температуры кристаллизации). При (Лсутствии влияния магнитног поля на микрообъект управляющим 894 , воздействием в предложенном устройстве может быть изменение напряженности магнитного поля, а жидкостный демпфер 7 в этом случае вьтолняется из магнитной жидкости, вязкость которой зависит от напряженности магнитного поля. Известны магнитные жидкости, вязкость которых меняется в широких пределах (практически до вязкости твердого тела), при изменении напряженности управляющего магнитного поля. Преимущество предложенного устройства в сравнении с известным заключается в исключении поперечных колебаний инструмента при его скачкообразном перемещении, что позволяет проводить прокол оболочки клетки без нарушения структуры и гибели клетки. Еще одним преимуществом рредложенного устройства является возможность установки поперечных колебаний микроинструмента в широком диапазоне частот с амплитудой менее 0,1-1 мкм и регулировки амплитуды колебаний, что расширяет диапазон микроманипуляционных операций, а именно позволяет обеспечить фиксирование и дистанционное перемещение микрообъектов посредством вибрирующей с разной частотой и амплитудой иглы, вибрационное вырезание микроотверстий в клеточной ткани, дезинтеграцию микрообъектов и др. Кроме того, преимуществом предложенно- . го устройства является возможность жесткой фиксации инструмента в одном положении,что важно при долговременных микрооперациях.
/J //y/2J /////// /y/////.
/ /
at ж a a /
Г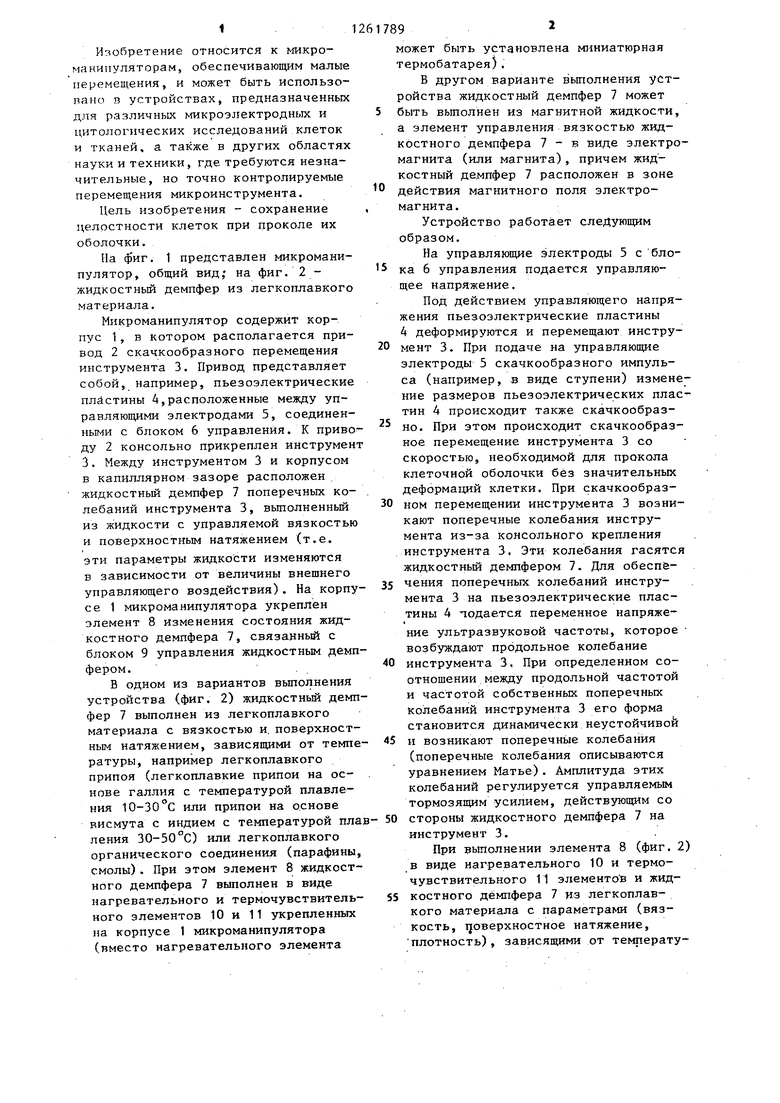
| название | год | авторы | номер документа |
|---|---|---|---|
| Микроманипулятор | 1982 |
|
SU1102669A1 |
| Устройство управления ультразвуковым микроманипулятором | 1977 |
|
SU699465A1 |
| Установка для прецизионных работ с микрообъектами | 1980 |
|
SU1008688A1 |
| Устройство для работ с микроскопическими объектами | 1982 |
|
SU1042734A1 |
| Устройство для изучения биопотенциалов биологических объектов | 1979 |
|
SU930795A1 |
| Устройство для вытеснения жидкости | 1974 |
|
SU518219A1 |
| Шаговый привод для малых перемещений | 1976 |
|
SU612075A1 |
| Способ определения межфазного натяжения жидкостей | 1982 |
|
SU1087833A1 |
| СПОСОБ ГАШЕНИЯ КОЛЕБАНИЙ И ЭЛЕКТРОСТАТИЧЕСКИЙ ДЕМПФЕР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2656232C1 |
| Ультразвуковой паяльник | 1990 |
|
SU1756049A1 |
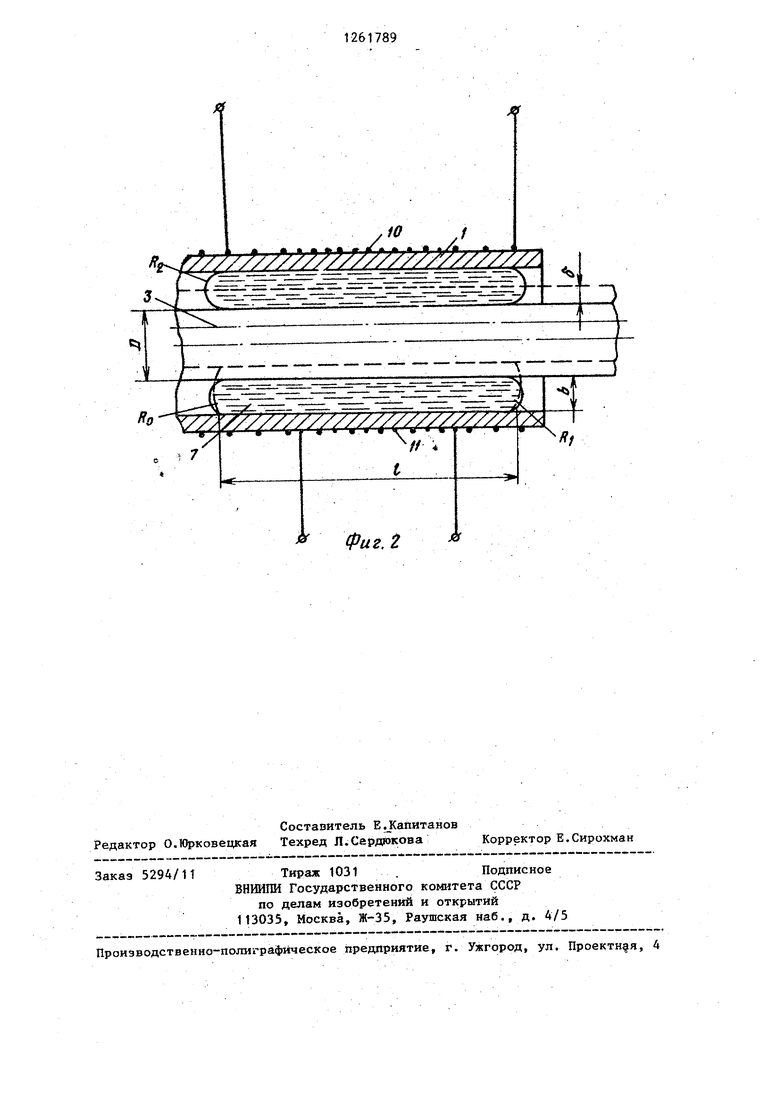
МИКРОМАНИПУЛЯТОР, содержащий корпус, привод и инструмент, о т л ичающийся тем, что, с целью сохранения целостности клеток при проколе их оболочки, он снабжен жидкостным демпфером поперечных колебаний инструмента, вьшолненным в виде капиллярного зазора мезкду стенкой корпуса и инструментом, заполненного жидкостью, элементом изменения состояния демпфера, установленным на корпусе в зоне зазора, и блоком управления, соединенным с элементом. СЛ го О5 00 CD фиг.1
Фиг, t
| Микроманипулятор | 1982 |
|
SU1102669A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
