.
- nn
гюякгео jt /It I I I I
-W
T AJJjUjfc
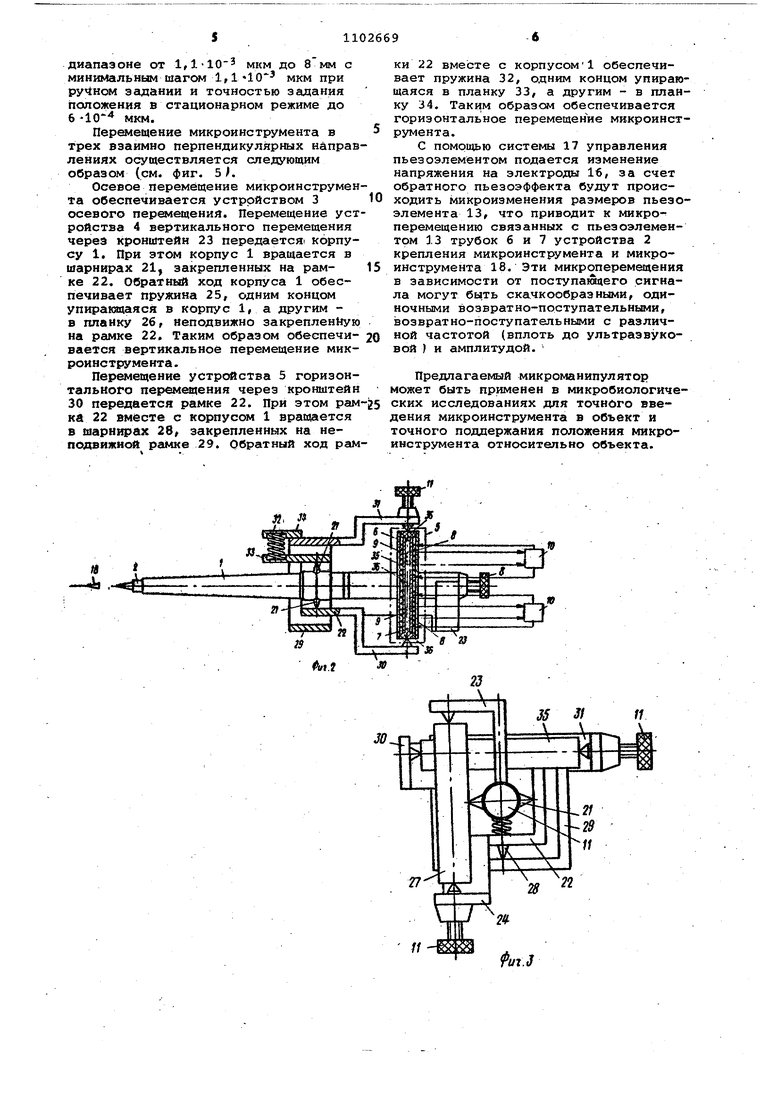
) л r И С К i. Изобретение относится к микромани пуляторам, обеспечивающим малые перемещения, и может быть использовано в устройствах, предназначенных для различных микроэлектродных и цитологических исследований клеток и тканей, а также в других областях науки и техники, где требуются незначитель ные, но точные перемещения инструмента. Известен микроманипулятор; предназначенный для введения микроэлектрода в биологическую ткань, содержащий корпус, устройство крепления микроэлектрода и устройство перемещения микроэлектрода, действие которого основано на использовании обратного пьезоэффекта fl . . Недостатком указанного микроманипулятора является то, что микроэлект род может перемещаться только по одной координате, вследствие чего микроманипулятор имеет ограниченные функциональные возможности. Наиболее близким к изо.бретению является микроманипулятор, содержащий корпус, устройство крепления микроинструмента, термоуправляемые устройства перемещения микроинструмента в трех взаимоперпендикулярных нап авлениях С 21. Каждое из термоуправляемых устройств выполнено в виде двух параллельно расположенных электропроводных стержней, связанных с корпусом и устройством крепления микроинструмента. Электрический ток, проходя череэ стержни, изменяет их длину за счет теплового расширения. Тем самым обеспечивается перемещение микроинструмента в нужном -направЛенин. Конструкция микроманипулятор и отсутствие точного, задания и поддержание температуры стержней обеспе чивают точность микроперемещений не лучше 1 мкм в диапазоне 1-400 мкм. Такая точность микроперемещений не позволяет производить целенаправленные операции с микрообъектами, имею щими размеры порядка мкм и меньш Целью изобретения является повышение точности микроперемещений. Указанная цель достигается тем, что в микроманипуляторе, содержащем корпус, устройство крепления микроин струмента, термоуправляемые устройства перемещения микроинструмента в трех взаимно перпендикулярных направ лениях, одно из которых совпадает с направлением оси микроинструмента, термоуправляемые устройства перемещения микроинструмента по каждой из координат выполнены в виде двух последовательно соединенных между собой трубок, коэффициенты теплового расширения которых относятся как 1:50, причем на каждой из трубок расположены тепловой исполнительный элемент и термочувствительный элемент. Такое выполнение термоуправляемых устройств перемещения микроинструмента, а также снабжение их тепловым исполнительным и термочувствительным элементами обеспечивает повышение точности микроманипулятора и расширение диапазона микроперемещений. На фиг. 1 изображен предлагаемый микpoмaнипyлятopf вид сбокуv на фиг. 2 - то же, вид сверху; на фиг.3то же, вид сзади на фиг. 4 - устройство крепления микроинструмента с компенсатором тепловых линейных расширений; на фиг. 5 - кинематическая схема перемещения микроманипулятора. Микроманипулятор содержит корпус 1, устройство 2 крепления микроинструмента, термоуправляемые устройства перемещения микроинструмента в трех взаимно перпендикулярных направлениях: устройство 3 осевого (продольного ) перемещения микроинструмента (см.фиг.1), устройство 4 вертикального перемещения микроинструмента (см. ФИГ. 1) и устройство 5 горизонтального перемещения микроинструме1 та (см. фиг. 2). Каждое из устройств (см. фиг. 1 и 2) представляет собой последовательно соединенные между собой трубки 6 и 7, коэффициенты тепловых линейных расширений которых относятся как 1:50, например, из алюминия и кварца, при этом трубка 6 выполнена из алюминия, а трубка 7 из кварца. На каждой из трубок 6 и 7 i расположены тепловой исполнительный элемент 8 и термочувствительный элемент 9. Термочувствительный элемент 9 соединен с входом устройства 10 задания и поддержания температуры трубки, выход устройства 10 соединен с тепловым исполнительным элементом 8, например; нагревателем. Каждое термоуправляемое устройство связано с соответствующей микро- . метрической подачей 11. Термоуправляемое устройство 3 осевого ( продольного } перемещения микроинструмента закреплено в корпусе 1 микроманипулятора (см.фиг.1). Связь устройства 3 осевого перемещения с микрометрической подачей 11 осуществлена посредством штока 12. К одному концу штока 12 через пьезоэлемент 13 консольно прикреплена трубка 6, другой конец штока 12 через тепловырав- нивающую шайбу 14 связан с микрометрической подачей 11. Между тепловыравнивающей шайбой 14 и корпусом 1 расположена возвратная пружина 15. Пьезоэлемент 13 посредством электродов 16 связан с системой 17 управ-:ления пьезоэлемеятом. Трубка 7 устройства 3 осевого перемещения соединена с устройствам 2 крепления микроинструмента, на котором закреплен микроинструмент 18. Для устранения люфта при перемещении шток 12 прижимается планкой 19, подпружиненной пружиной 20.
Корпус 1 микроманипулятора с закрепленным в нем устройством 3 осевого перемещения через безлюфтовые шарниры 21 см. фиг. 2 и 3| соединен с подвижной рамкой 22 (см. фиг, 1,2 и 3
Термоуправляемое устройство 4 вертикального перемещения установлено между кронштейном 23, прикрепленным неподвижно к корпусу 1, и кронштейном 24, прикрепленным неподвижно к рамке 22. Возвратна.я пружина 25 закреплена между планкой 2Ь , прикрепленной к подвижной рамке 2 2, и корпусом. 1 тройствс 4 вертикального перемещения закрыто тепловыравнивающим экраном 27. .
Подвижная Рс1мка 22 через безлюфтовые шарниры 28 (см. фиг. 1,3) соединена с неподвижной рамкой 29.
Термоуправляемое устройство 5 горизонтального перемещения установлено между кронштейном 30, прикрепленным неподвижно к рамке 22, и кронштейном 31, прикрепленным неподвижно к рамке 29. Возвратная пружина 32 закреплена между планкой 33, прикрепленной неподвижно к рамке 22, тл планкой 34, прикрепленной неподвижно к рамке 29. Устройство 5 горизонтального перемещения закрыто тепловыравнивающим экраном 35.
Трубки 6 и 7 и пьезоэлемент 13 соединяются между собой и с другими конструктивными элементами микретланипулятора через теплоизолятор 36. Неподвижная рамка 29 прикреплена, например, к предметному столику микроскопа iHe указан).
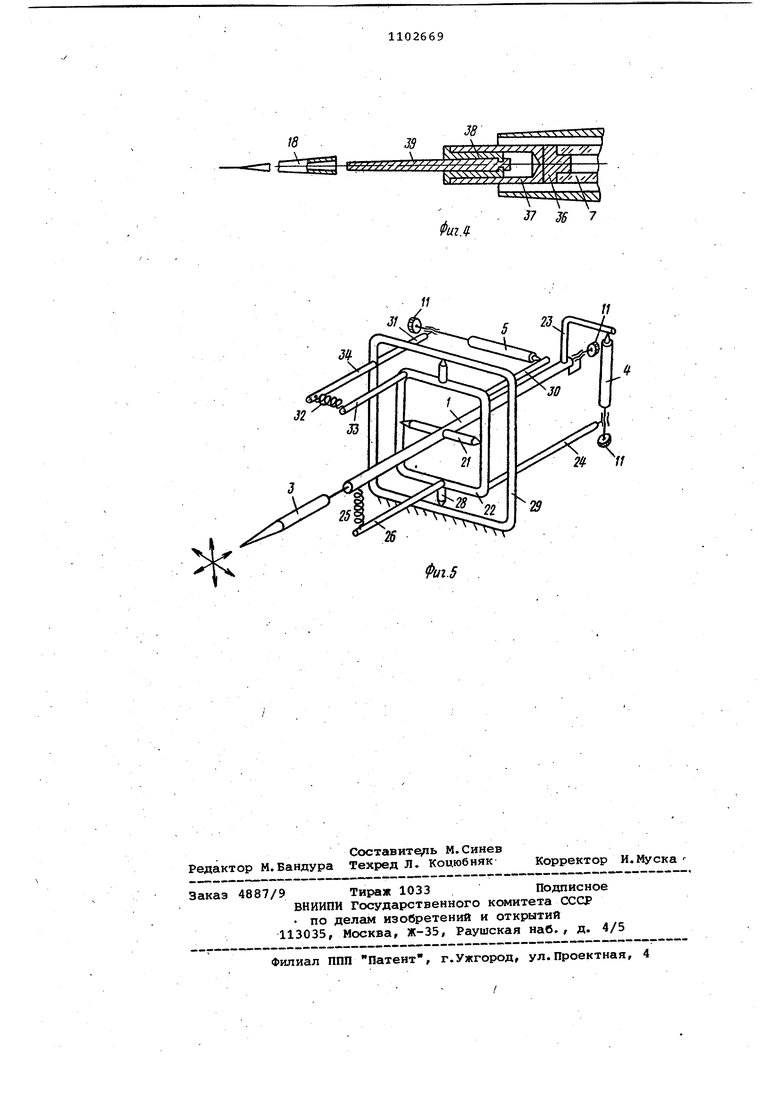
Устройство 2 крепления микроинст-. румен а (см. фиг. 4 ) содержит втулку 37, закрепленный на втулке 37 компенсатор 38 теплового линейного расширения и стержень 39. Втулка 37 через теплоизолятор 36 соединена с трубкой 7 устройства 3 осевого перемещения. На стержень 39 крепится микроинструмент 18, изготовленный, например, из стекла.
Конструктивные элементы микроманипулятора, такие как корпус, шток, микрометрические подачи, рамки, кронштейны, планки, корпус устройства крепления микроинструмента, стержень и др., кроме специально оговоренных по материалу (трубки, пьезоэлемент, пружины, теплоизоляторы, компенсатор, микроинструмент), выполнены из инвара или ковара.
Для лучшего температурного выравнивания внешняя поверхность корпуса l
омеднена и на ней расположены пленочный нагреватель и термочувствительный элемент, связанные с регулятором температуры корпуса (эти элементы не указаны), обеспечивающие при необходимости поддержание требуемой температурк корпуса 1 с: точностью 0,1 град
Микроманипулятор работает следуюгдим образом.
Микрометрической подачей 11 вручную либо от внешнего управляемого привода обеспечивают диапазон перемещений микроинструмента от 10 мкм до 8 мм с точностью вывода и установки микроинструмента относительно микрообъекта до 5-10 мкм. Далее устройством 10 задания и поддержания температуры трубки с помощью теплового исполнительного элемента 8 и термочувствительного элемента 9 изменяют температуру трубок 6 и 7 вручную либо автоматически по заданной программе. Трубка 6 выполнена, например, из алюминия длиной 25 мм. Изменение температуры трубки на 20 град. даёт изменение ее длины на 12 мкм. изменение ее температуры при ручном задании на 0,1 град, дает изменение длины трубки на 0,06 мкм. Поддержание заданной температуры трубки 6 в стационарном режиме до 0,001 град, обеспечивает точность установки микроинструмента до мкм. Для более малых перемещений изменяют температуру трубки 7; Трубка 7 выполнена, например, из кварца длиной 25 мм.
Изменение температуры трубки 7 на 6 град, дает изменение длины трубки на 0,06 мкм. Изменение ее температуры при ручном задании на 0,1 град, дает изменение длины трубки на 1,1-10 Мкм. Коэффициент линейного расширения трубки 7 в 50 раз меньше коэффициента линейного расширения трубки Ь, что обеспечивает перекрытие верхнего предела диапазона микроперемещений трубки 7 с нижним пределом диапазона микроперемещений трубки 6. Верхний предел диапазона перемещений трубки 6 обеспечивает перекрытие нижнего предела диапазона перемещений микрометрической подачи 11. Последовательно соединенные трубки 6 и 7 одним концом связаны с неподвижно фиксированной в заданном положении микрометрической подачей 11. Другой конец последовательно соединенных трубок 6 и 7 упирается в подвижный элемент микроманипулятора, поэтому при тепловом расширении трубок 6 и 7 изменение их длины будет происходить только в однотл направлении - в направлении подвижного элемента, который придет в движение и будет перемещать связанные с ним элементы. Таким образом, обеспечива ется перемещение микроинструмента в
диапазоне от 1,1-10 мкм до 8мм с минимальным шагом 1,110 мкм при pyiHoM задании и точностью задания положения в стационарном режиме до 6 -10 мкм.
Перемещение микроинструмента в трех взаимно перпендикулярных направлениях осуществляется следующим образом (см. фиг. 5 Л
Осевое перемещение микроинструмента обеспечивается устройством 3 осевого перемещения. Перемещение устройства 4 вертикального перемещения через кронштейн 23 передается корпусу 1, При этом корпус 1 вращается в шарнирах 21 закрепленных на рамке 22. Обратный ход корпуса 1 обеспечивает пружина 25, одним концом упиракяцаяся в корпус 1, а другим в плаику 26, неподвижно закрепленную на рамке 22. Таким образом обеспечивается вертикальное перемещение микроинструмента.
Перемещение устройства 5 горизонтального перемещения через кронштейн 30 передается рамке 22. При этом рам ка 22 вместе с корпусом 1 вращается в шарнирах 28, закрепленных на непо«движн раМке 29. Обратный ход рамИ. J
--Ь
Фиг.г
ки 22 вместе с корпусом1 обеспечивает пружина 32, одним концом упирающаяся в планку 33, а другим - в планку 34. Таким образом обеспечивается горизонтальное перемещение микроинструмента.
С помощью системы 17 управления пьезоэлементом подается изменение напряжения на электроды 16, за счет обратного пьезоэффекта будут происходить Микроизменения размеров пьезоэлемента 13, что приводит к микроперемещению связанных с пьезоэлементом 13 трубок 6 и 7 устройства 2 крепления микроинструмента и микроинструмента 18. Эти микроперемещения в зависимости от поступагадего сигнала могут быть скачкообразными, одиночными возвратно-поступательными, возвратно-поступательными с различной частотой (вплоть до ультразвуковой ) и амплитудой.
Предлагаемый микроманипулятор может быть применен в микробиологических исследованиях для точного введения микроинструмента в объект и точного поддержания положения микрокнструмента относительно объекта.
//
ft
18
I. . ЧЧ iГ
33
ЕУ /74У/iC/- /
I
УА/ I i
YZT
УУ//У/
tS
Ы2
37 36 7
fe.
| название | год | авторы | номер документа |
|---|---|---|---|
| Микроманипулятор | 1983 |
|
SU1161910A1 |
| Устройство для работ с микроскопическими объектами | 1982 |
|
SU1042734A1 |
| МИКРОМАНИПУЛЯТОР | 1992 |
|
RU2041480C1 |
| Микроманипулятор | 1983 |
|
SU1261789A1 |
| Камера для электрофизиологических исследований микрообъектов | 1983 |
|
SU1143775A1 |
| Микроманипулятор | 1972 |
|
SU441689A1 |
| Устройство для микроинъекции жидкости | 1983 |
|
SU1136810A1 |
| Устройство для регистрации электрической активности клеток пульсирующих тканей | 1981 |
|
SU1012885A1 |
| Установка для прецизионных работ с микрообъектами | 1980 |
|
SU1008688A1 |
| УСТРОЙСТВО ДЛЯ ЛОКАЛЬНОГО ПОДВЕДЕНИЯ БИОЛОГИЧЕСКИ АКТИВНЫХ ВЕЩЕСТВ | 1995 |
|
RU2102750C1 |
МИКРОМАНИПУЛЯТОР, содержащий корпус, устройство крепления микройиструмента, термоуправляемые устройства перемещения микроинструмеита в трех взаимно перпендикулярных направлениях, одно из которых совпадает с направлением оси микроинструмента, отличающийся тем, что, с целью повышения точности микроперемещений, термоуправляемые устройства перемещения микроинструмента по каждой из координат выполнены в виде двухпоследовательно соединенных между собой трубок, коэффициенты теплового расширения которых относятся как 1:50, причем на каждой из трубок расположены тепло вой исполнительный элемент и термочувствительный элемент.,
// J/
2 ff
.5
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| 1972 |
|
SU410773A1 | |
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Патент США 2857808, кл | |||
| Шланговое соединение | 0 |
|
SU88A1 |
| . | |||
