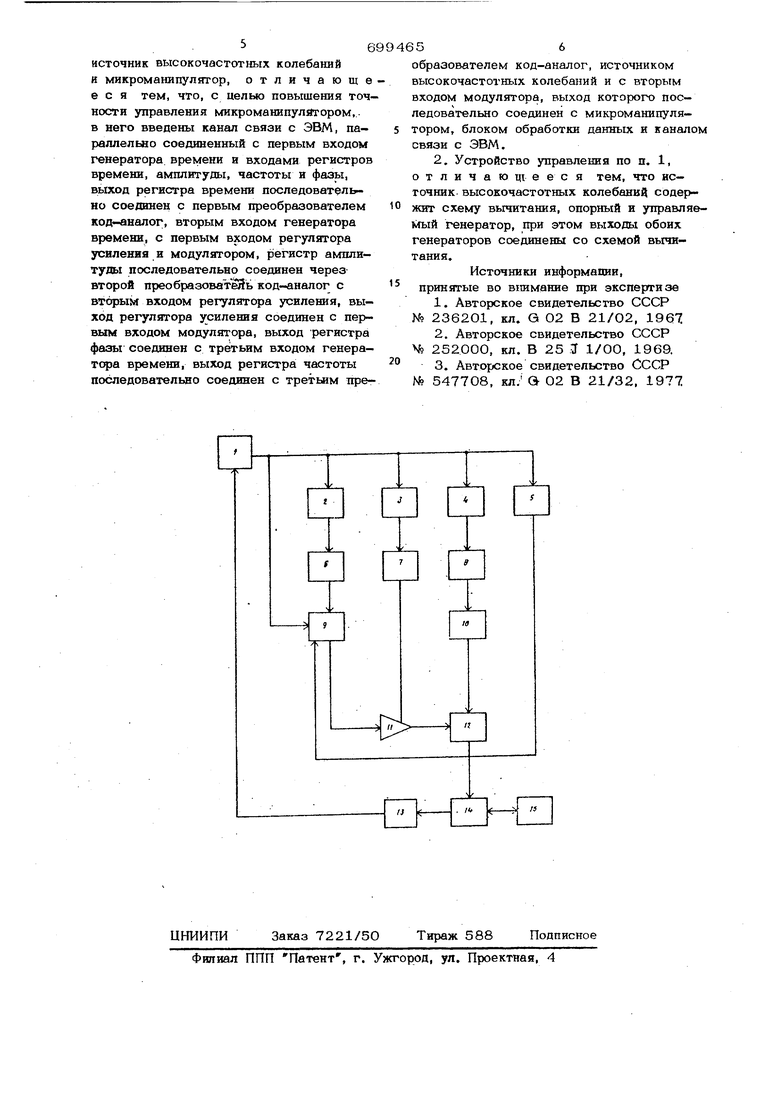
Настоящее изобретение относится к области приборостроения, к микроскопической, в частности, к микроманипуля- торной технике и может найти применени в микрофизиологии, электрофизиологии, микрохирургии и других областях медикобиологических исследований. Известные механические, электрические и ультразвуковые манипуляторы имею ручное управление (YJ и 2f. Устройство уп равления у всех механических микроманипуляторов использует рычаги, пружины, микрометрические винты, приводимые в движение вручную. В электрических микроманипуляторах 2j устройство управления приводом и инструментом включает источник питания с ручным регулирование электрического тока, подаваемого на при вод микроинструмента. Наиболее близким по технической сущ ности к заявленному устройству является устройство управления ультразвуковым микpoмaнипyлятopo y З, которое состоит из источника высокочастотных колебаний с ручным регулированием частоты электрических сигналов, поступаюших на привод микроинструмента. Недостатком данного устройства управления микроманипулятором является малая точность управления микроманипулятором, что не позволяет воздействовать инстументом на объект с временным интервалом меньшим десятков миллисе- Jcyнд, в результате чего теряется информация о кинетике объекта исследования. Кроме того. Отсутствует возможность поворотного позипионирования микроин- струмента на данный объект. Целью настоящего изобретения является повышение точности управления микроманипулятором. Поставленная пель достигается тем, что в известное устройство, содержащее источник высокочастотных колебаний и манипулятор, введены канал связи с ЭВМ параллельно соединенным с первым входом генератора времени и входами регистров времени, амплитуды, частоты и фазы, выход регистра времени последова тельно соединен с первым преобразователем код-аналог, вторым входом генератора времени, ,с первым входом регулятора усиления и модулятором, ре- гистр амплитуды последовательно соединен через второй преобразователь коданалог, со вторым входом регулятора, усиления, выход регулятора усиления coe динен с первым входом модулятора, выход регистра фазы соединен с третьим входом генератора времени, выход регистра частоты последовательно соединен с третьим преобразователем, источником высокочастотных колебаний и со вто- рым входом одул$ггора, выход которого последовательно соединен с входом микроманипулятора, блоком обработки данны и каналом связи с ЭВМ. Источник высокочастотных колебаний содержит схему вычитания, опорный и управляемый генератор, при этом выходы обоих генера торов соединены со схемой вычитания. Сущность изобретения поясняется чер тежом, где изображена общая схема устройства управления микроманипулятором. Устройство управления содержит: 1 канал связи с ЭВМ, 2 - регистр времени, 3 - регистр амплитуды, 4 - регистр частоты, 5 - регистр фазы, 6, 7, 8 преобразователи код-аналог, 9 - генерауор времени, Ю - источник высокочастотных колебаний, содержащий схему вычитания, опорный,и управляемый генершторы, 11 - регулятор усиления, 12 модулятор, 13 - микроманнпулятор, 14 устройство обработки, 15 - предметный столик микроскопа с исследуемым объек том. Устройство работает следующим образом. Для выполнения заданной операции исследуемь1й объект помещают на предметном столике микроскопа 15. Через канал связи с ЭВМ 1 оператор вызывае программу управления из памяти ЭВМ, по которой сигналы с заданной частотой амплитудой и временным интервалом поступают соответственно на регистры времени 2, амплитуды 3, частоты 4, фазы 5, и затем на преобразователи код-аналог 6, 7, 8. Первый преобразователь код-аналог 6 преобразует шфровой код в длительность импульсов и формирует импульс длительностью от 5 мксек до 1 сек Второй преобразователь код-аналог. 7 преобразует код амплитуды в пропорциональное напряжение, которое через регулятор усиления 11 управляет коэффициентом усиления модулятора 12. Третий преобразователь код-аналог 8 преобразует код частоты в пропорциональное напряжение, которое управляет частотой источника высокочастотных колебаний 1 О путем изменения емкости в колебателыном контуре. Источник высокочастотных колебаний 10 выделяет частоты в диапазоне от 1 КГЦ до 1 МГЦ, которые поступают на модулятор 12, где формируется ультразвуковой импульс.с заданной частотой, амплитудой, фазой и временным интервалом. .Сформированный импульс с модулятора 12 поступае-е на привод микроманипулятора 13, который приводит в движение микроинструмент, воздействующий на объект. Данные о резульлатах приведенной операции в виде напряжения с блока обработки 14 поступают в ЭВМ через канал связи 1, По результатам обработки формируется управляющий сигнал с новыми характеристиками. И так происходит до Тех пор, пока не будет достиг нуто выполнеш1е заданной операции, которая может представлять собой Снятие размеров объектов, поиск объекта в среде, проведение микроопераций с объектом,., таких как сверление,; дробление, резание, прокол. Использование предлагаемого изобретения в сравнении с известными устройствами позволяет повысить точность управления микроманипулятором, на 2.3 порядка, что дает возможность получить весь спектр данных об исследуемом объекте. При ручном управлении из-за малой точности происходят потери информации и,пропуски ее, обусловленнъю быстрым изменением функционального состояния объекта. Кроме того, данное устройство обеспетавает возможность повторного пози1Шрнирования микроиструмента на исследуемый объект. Устройство управления делает известный ультразвуковой микроманипулятор универсал ьнъ1м и гибким средством управления, обеспечивая высокута эффективность. Он может принимать решение на основе обратной связи и изменять режим работы в соответствии с принятым решением. Формула изобретения, 1. Устройство управления улыгразвуК.рвым микромаштулятором, включающее
источник высокочастотных колебаний и микроманипулятор, отличающееся тем, что, с целью повышения точности управления микроманипулятором, в него введены канал связи с ЭВМ, параллельно соединенный с первым входом генератора времени и входами регистров времени, амплитуды, частоты и фазы, выход регистра времени последовательно соединен с первым преобразователем код-аналог, вторым входом генератора времени, с первым входом регулятора усиления и модулятором, регистр амплитуды последовательно соединен через второй преобразоват1БЙь код-аналог с вторым входом регулятора усиления, выход регулятора усиления соединен с первым входом модулятора, выход регистра фазы соединен с третьим входом генератора времени, выход регистра частоты последовательно соединен с третьим преобразователем код-аналог, источником высокочастотных колебаний и с вторым входом модулятора, выход которого последовательно соединен с микроманипулятором, блоком обработки данных и канало связи с ЭВМ.
2. Устройство управления по п. 1, отличающееся тем, что источник высокочастотных колебаний содер жит схему вычитания, опорный и управляемый генератор, при этом выходы обоих генераторов соединены со схемой вычитания.
Источники информации, принятые во В1шмание при экспертизе
1.Авторское свидетельство СССР № 2362О1, кл. Q О2 В 21/О2, 1967
2.Авторское свидетельство СССР 252000, кл. В 25 J 1/00, 1969.
3.Авторское свидетельство СССР № 547708, кл; & 02 В 21/32, 1977
| название | год | авторы | номер документа |
|---|---|---|---|
| МУЛЬТИПЛЕКСОР ПЕРЕДАЧИ ДАННЫХ | 2005 |
|
RU2295148C1 |
| Устройство управления процессом резания | 1986 |
|
SU1393531A1 |
| Программируемый источник питания | 1988 |
|
SU1597875A1 |
| УСТРОЙСТВО ЗОНДИРОВАНИЯ СТРОИТЕЛЬНЫХ КОНСТРУКЦИЙ | 2015 |
|
RU2589886C1 |
| УСТРОЙСТВО ЗОНДИРОВАНИЯ СТРОИТЕЛЬНЫХ КОНСТРУКЦИЙ | 2011 |
|
RU2460090C1 |
| АВТОМАТИЗИРОВАННОЕ РАБОЧЕЕ МЕСТО ОПЕРАТОРА УПРАВЛЕНИЯ ВОЗДУШНЫМ ДВИЖЕНИЕМ | 2001 |
|
RU2219586C2 |
| ИНФОРМАЦИОННАЯ СИСТЕМА СВЯЗИ | 1991 |
|
RU2019851C1 |
| Устройство для измерения фазоамплитудных характеристик | 1986 |
|
SU1401397A1 |
| Вибрационное устройство для перемещения малогабаритных объектов | 1982 |
|
SU1148820A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ПОДВИЖНОГО ОБЪЕКТА В ЗАКРЫТЫХ ПОМЕЩЕНИЯХ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2007 |
|
RU2351945C1 |
