Существующие системы микроманипуляторов с винтовым замедлением обладают многими недостатками. Одним из самых значительных недостатков является сложность устройства, удорожающая прибор, делающая его неудобным в обращении и затрудняющая его починку. Микроманипулятор с рычажным замедлением по авторским свидетельствам № 38799 и № 41217 достаточно портативен и удобен для работы с малым увеличением микроскопа, но при изготовлении рычажных микроманипуляторов, приспособленных для работ с большим увеличением микроскопа, приходится включать дополнительно еще один или два ромба-пантографа, которые сильно увеличивают габариты прибора. Кроме того известно, что человеческая рука может производить точнее вращательные движения, нежели поступательные. Поэтому для работ под больщими увеличениями микроскопа, требующими наивысшей точности, необходимо пользоваться микроманипулятором с винтовым замедлением. Причина сложности винтовых микроманипуляторов (Петерфи, Чемберса и др.) заключается главным образом в том, что изобретатели их старались сконцентрировать все рабочие винты возможно ближе один к другому для того, чтобы в процессе микрохирургической работы экспериментатору легче было найти тот или другой винт.
При условии пользования приспособлением по авторскому свидетельству № 46716 исчезает необходимость в такой концентрации винтов, а это значительно упрощает вопрос.
В описываемом ниже микроманипуляторе отсутствует концентрация винтов. Кроме того, здесь имеется упрощение: одни и те же винты служат и для грубых и для тонких движений.
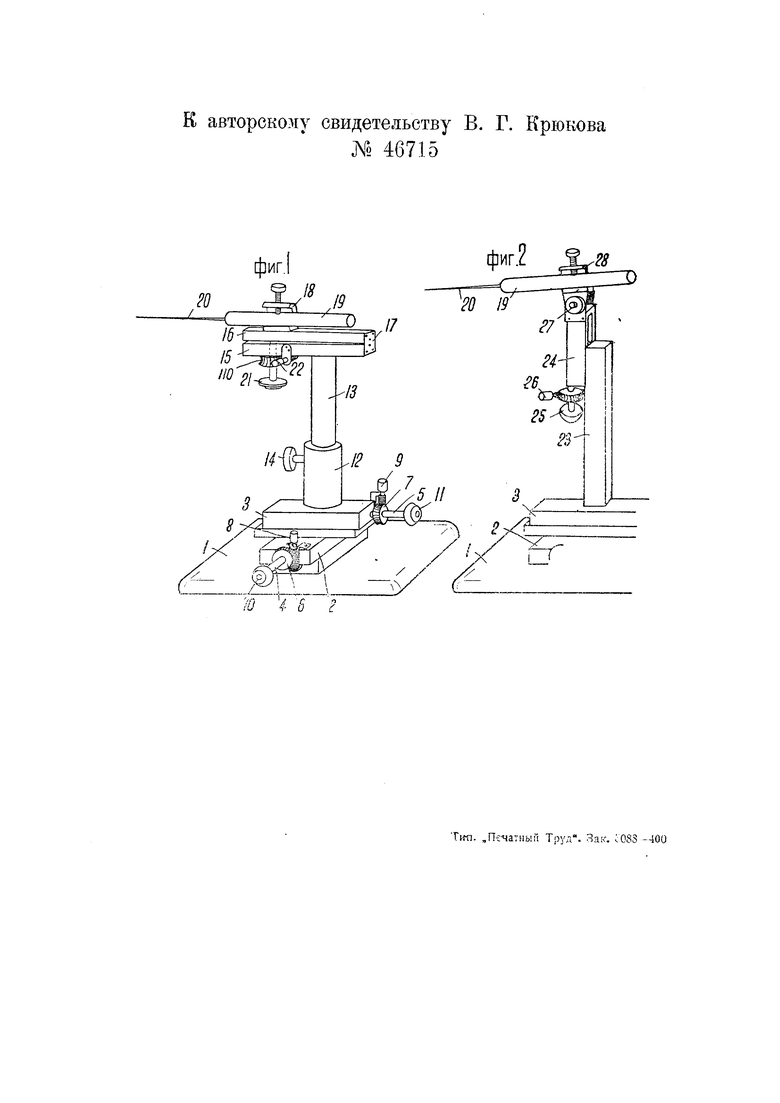
На чертеже фиг. 1 изображает микроманипулятор для одной руки (правой или левой - безразлично), фиг. 2 изображает видоизменение подъемного механизма того же микроманипулятора.
Весь механизм помещается на массивной доске /. Горизонтальные движения осуществляются двумя взаимно перпендикулярными системами салазок 2 и 3, приводимыми в движение при помощи вращения головок винтов 4 5. На винты и 5 не очень плотно надеты колеса б и 7, в нарезку которых входят червячные винты 7 и 9. Если вращать винт 8 (или 9, то вращается и колесо 6 (или 7), а с ним и винт 4 (или 5}. Из чертежа видно, что червячные винты 8 и 9 служат для производства чрезвычайно медленных движений: поворот на 15° должен дать передвижение салазок на 1 микрон. Если же вращать винты 4 и 5 непосредственно за их головки 10 и //, то колеса б и 7, которые, как указано выше, неплотно насажены на Оси, остаются неподвижными, удерживаемые винтами 8 и 9. Вращаются только винты 4 (или 5), осуществляя грубые движения. На верхних салазках 3 установлен патрубок /2, в который вставлен стержень /5, закрепленный в нем неподвижно винтом 4. Вдвигая или выдвигая стержень /5, можно установить высоту микроинструмента соответственно высоте предметного столика данного микроскопа. Подъемный механизм (фиг. 1) состоит из двух пластин /5 и f6, соединенных между собой при помощи пружинящей пластинки /7. На верхней пластине J6 прикреплен зажим /8, в который вставляется инструментодержатель 9 с микроинструментом 20. Грубые и тонкие движения осуществляются винтами 27, 22 и ПО, устройство которых тождественно с устройством винтов 4, S, 6 и 5, 9, 7. При этом винт 2J служит для раздвигания или сужения щели между пластинами 15 и 16, а следовательно, и для подъема или опускания микроинструмента.
Видоизменение подъемного механизма (фиг. 2) вместо патрубка 12, стерженька // и устройства /5, 16, 17, 21, 22 и 110 имеет стойку 23, укрепленную на салазках 3, а также салазки 24, позволяющие при помощи винта 25 и червяка 26 грубо или тонко передвигать микроинструмент 20 вверх или вниз.
На салазках 24 сверху при помощи шарнира 27 укреплен зажим 28 так, что зажатому в нем инструментодержателю 19 можно придавать тот или другой наклон в известных пределах.
Первое или второе видоизменение микроманипулятора может изготовляться в зависимости от того, какой из двух вариантов кажется выгоднее для данного производства.
Предмет изобретения.
1.Mикpoмaнипyлятop стойка которого установлена на двух взаимно перпендикулярных системах салазок и зажим для инстрзментодержателя которого уложен на стойке в приспособлении, могущем сообщать ему перемещение в вертикальной плоскости, отличающийся тем, что винты 4, 5 и 21 для грубого перемещения частей микроманипулятора снабжены насаженными на них с трением червячными колесами 6, 7 и 110, приводимыми во вращение при тонких перемещениях при помощи червячных винтов 8, 9 и 22.
2.В микроманипуляторе по п. 1 применение приспособления для сообщения инструментодержателю перемещения в вертикальной плоскости, состоящего из двух пластин /5 и 16, соединенных между собой на одном конце пружинящей пластинкой /7 и раздвигаемым на другом конце винтом 2/ (фиг. 1).
3.Видоизменение приспособления по п. 2, заключающееся в применении ходящих в верхней части стойки 23 салазок 24, приспособленных для грубого и тонкого вертикального перемещения при помощи винта 25 и червяка 26 и несущих укрепленный на щарнире 27 зажим 28 для инструментодержателй.
к авторскому свидетельству В. Г. Крюкова
№ 46715
| название | год | авторы | номер документа |
|---|---|---|---|
| Микроманипулятор | 1934 |
|
SU41217A1 |
| Приспособление для управления движением микроинструмента микроманипулятора | 1935 |
|
SU46716A1 |
| МИКРОМАНИПУЛЯТОР | 1933 |
|
SU38799A1 |
| Микроманипулятор | 1947 |
|
SU146954A1 |
| Механизм для управления движениями винтов микроманипулятора | 1947 |
|
SU75073A1 |
| МИКРОМАНИПУЛЯТОР | 1939 |
|
SU60382A1 |
| МИКРОМАНИПУЛЯТОР | 1933 |
|
SU38800A1 |
| Многоигольный микроманипулятор | 1955 |
|
SU103456A1 |
| Микроманипулятор | 1983 |
|
SU1161910A1 |
| Съемное приспособление к токарному станку для нарезания зубчатых колес | 1931 |
|
SU32890A1 |