00
к
ел
11ОО87252
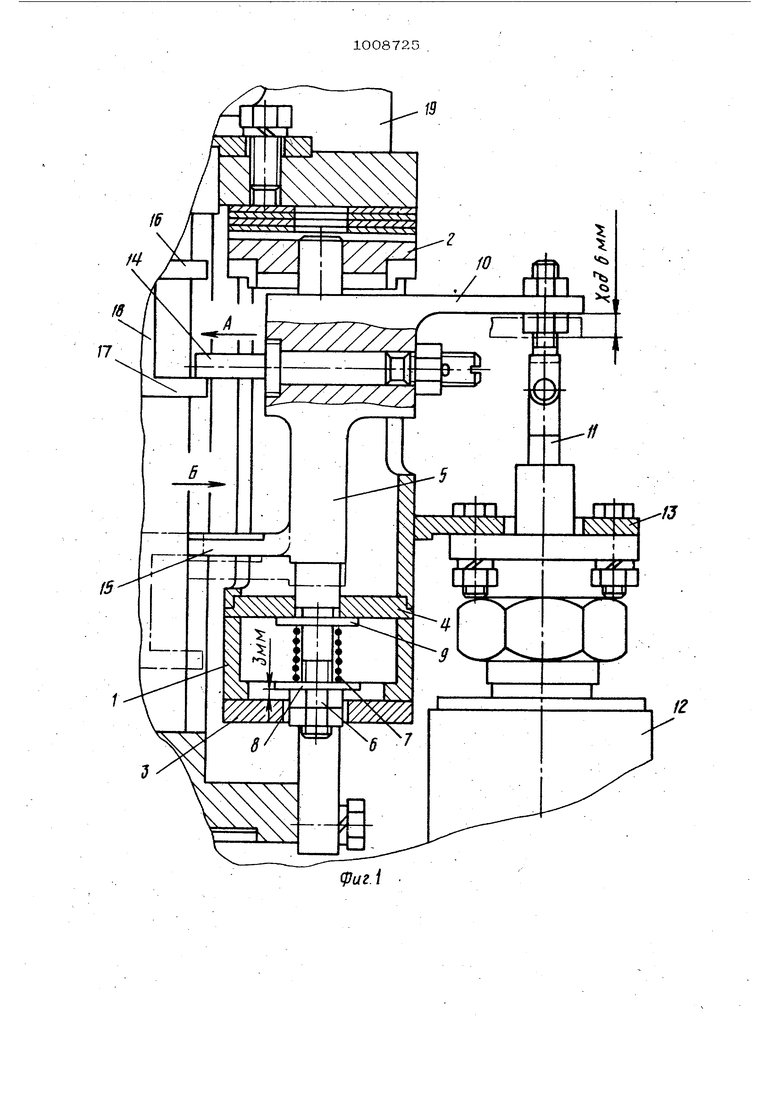
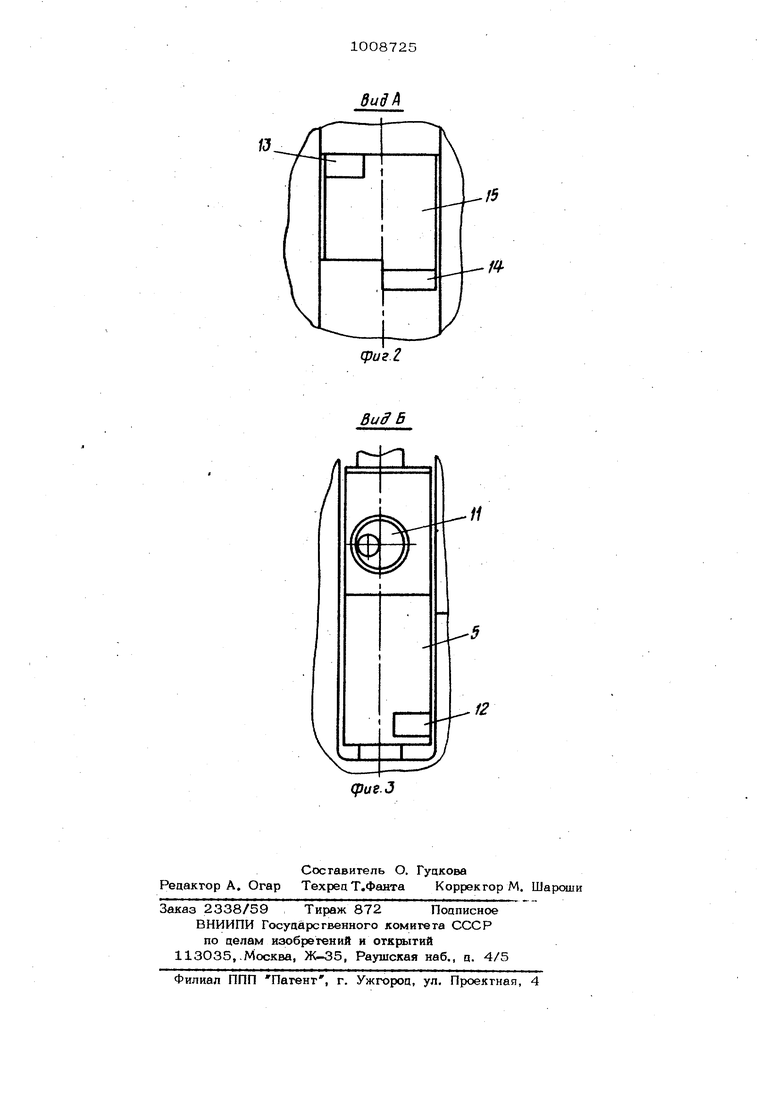
Иаобрегение огносигся к маш1шосгро- бургом ползуна 5 и гайкой б усгановлеению и можег быть использовано в привоц- на пружина 7 с шайбами 8 и 9. Гайка 6 ных устройствах сигнализаторов. Известен винтовой механизм выключения, в котором винт вращается от черьвячной пары. При соприкосновении винта с выступом поапружиненного цвуплечего рьпшга последний поворачивается вокруг своей оси и противоположным концом воздействует на устройство, отключающее двигатель (сигнализатор) ij . Недостатком известного механизма является то, что конец двуплечего рыча- га, сидящего на оси, воздействует на щт сигнализатора не вдоль его оси, а под углом, что приводит к изгибающим напря жениям на щтоке и уменьшает надежност работы сигнализатора. Известна также схема управления сверлильным шпинделем при помощи упоров. При сверлении шток пневмоцилиндра передающий усилие подачи на шпиндель, движется поступательно и своим упором. взаимодействуя с выступом на-штанга, перемещает ее и выключает систему 2J Недостатком этой схемы является от- сутствие возврата штанги в исходное положение после прекращения воздейст ВИЯ на нее упора штока. Цель изобретения - повышение надежности устройства при реверсивном режиме работы. . Поставленная цель достигается тем, что в приводе сигнализатора, содержащем входное подвижное звено, на котором размещены управляющие упоры, сопряженные с выступами ползуна, установленного в направляющих корпуса с возможностью возвратно-поступателЕ ного движения и жестко связанного одним из своих выступов со шгоком сигнализатора, ползун подпружинен, причем пружина установлена между двумя буртами ползуна, один из которых выполнен регулируемым, и сопряжена своими торцами с ограничительными упорами корпуса через свободно установленные на ползуне шайбы, размешенные ме цу опзаничительными упорами корпуса, На фиг. 1 изображен сигнализатор, обший вид; на фиг. 2 - вид А на фиг. 1 (вид на смещенные относительно друг друга упоры подвижного звена); на фиг, 3 - вид Б на фиг. 1 (виц на сме- щенные относительно друг друга выступы ползуна). Привод сигнализатора (фиг, 1) состо ит из съемного корпуса 1, имеющего съемные крышки 2 и 3 и дно 4, Между редназначена для предварительного поджатия пружины 7. Расстояние между цном 4 и крышкой 3 выбрано, конструктивно и определено высотой пружины 7. Выступ 1О ползуна жестко связан со током 11 сигнализатора 12, установленного на фланце 13 съемного корпуса 1, а два других выступа 14 и 15 взаимодействуют с управляющими упо- рами 16 и 17 входного подвижного звена 18 смещенными друг относительно друга, Корпус 1 привода крепится на корпусе блока 19 сигнализатора, Привод сигнализатора работает следующим образом, Ползун 5 и щток 11 сигнализатора 12 находятся в среднем положении, при этом пружина 7 разжата, а упоры подвижного звена 18 не взаимодейству- ют свыступами ползуна 5, При движении вверх подвижного звена 18 нижний его упор 17, взаимодействуя с выступом 14 ползуна 5, перемещает его вверх на ход 3 мм до крайнего верхнего положения. Это движение через выступ 10 ползуна 5 передается на шток il сигнализатора 12, обеспечивая ход штока на 3 мм от среднего положения до крайнего верхнего положения (щток выдвинут). При этом гайка 6, установленная на ползуне 5, своим тор- цом через шайбу 8 поджимает пружину 7 к щайбе 9, -При движении подвижного звена 18 вниз пружина 7 разжимается до тех пор, пока шайба 8 не упрется в нижнюю крышку 3, при этом ползун и шток 11 сигнализатора возвращаются в среднее положение. При дальнейшем движении вниз nqaвижного звена 18 упор 16 вступает во взаимодействие с выступом 15 и перемещает ползун 5 вниз на ход 3 мм до крайнего нижнего положения. Шток 11, соответственно, перемещает на 3 мм цо крайнего нижнего положения {щток выдвинуг). При этом ползун 5 своим буртом через шайбу 9 поджимает пружину 7 к шайбе 8. Возвращение ползуна в среднее положение благодаря установке на нем возвратной Пружины позволяет повысить надежность при реверсивном режиме работы предлагаемого привода сигнализатора. Кроме того, конструктивное выполнение привода сигнализатора с монтажом всех деталей в одном корпусе обеспечивает удобство при эксплуатации.
фиг. i
| название | год | авторы | номер документа |
|---|---|---|---|
| МЕХАНИЧЕСКИЙ ПРЕСС | 1976 |
|
SU671164A1 |
| Станция погрузки-разгрузки перемещаемого по пневмотрубопроводу контейнера с торцовыми крышками | 1987 |
|
SU1497133A1 |
| ГИДРАВЛИЧЕСКИЙ УСИЛИТЕЛЬ | 1965 |
|
SU170308A1 |
| Односторонний вакуумный клапан шиберного типа | 1985 |
|
SU1275175A1 |
| Устройство для смены валков прокатной клети | 1980 |
|
SU995937A1 |
| Устройство для зачистки жил кабелей после снятия изоляции | 1979 |
|
SU890504A1 |
| Устройство для сборки под сварку | 1986 |
|
SU1344555A1 |
| Вертикальный механический пресс | 1982 |
|
SU1073131A1 |
| Центробежный регулятор частоты вращения дизеля | 1981 |
|
SU1019089A1 |
| Металлорежущий станок с устройством для автоматической смены многошпиндельных инструментальных коробок | 1985 |
|
SU1238937A1 |
ПРИбОД СИГНАЛИЗАТОРА, соцержащий вхоаное поовижное звено, на котором размещены управляющие упоры, сопряженные с выступами ползуна, установленного в нащавляюших КО| пуса с возможностью возвратно-поступательного движения и жестко связанного со ulTOKOM сигнализатора, отличающийся тем, что, с целью повышения надежности при реверсивном режиме работы, ползун подпружинен, причем пружина установлена между авумя буртами ползуна, один из которьсх выполнен регулируемым, и сопряжена своими торцами с ограничительными упорами корпуса . через свободно установЛёЯяые на ползуне шайбы, размещенные между ограничительными упорами корпуса.
Вид Б
r-И
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Артоболевский -И | |||
| И | |||
| Механизмы в современной технике | |||
| М., Наука, т | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Шаумян Г | |||
| А | |||
| Автоматизация про,иэводственных процессов | |||
| М., Вьгсшая urKCMia ,- 1967, с | |||
| Стиральная машина для войлоков | 1922 |
|
SU210A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| - | |||
