2. Устройство по п. 1, отличающееся тем, что блок СИНХ-. ронизации выполнен в виде последовательно соединенных фильтра низких
частот с частотой среза,равной частоте первой гармоники напряжения Литания, фазовращателя на угол ЗГ/2,триггера Шмидта и дифференцирующего блока.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ косвенного контроля динамического эксцентриситета асинхронной электрической машины | 1977 |
|
SU672708A1 |
| Устройство для определения неравномерности воздушного зазора электрических вращающихся машин | 1976 |
|
SU661232A1 |
| Устройство для косвенного контро-ля НЕРАВНОМЕРНОСТи ВОздушНОгО зАзОРАэлЕКТРичЕСКиХ ВРАщАющиХСя МАшиН | 1979 |
|
SU813603A1 |
| Устройство для измерения неравномерности воздушного зазора электрической машины | 1983 |
|
SU1120257A1 |
| Регулируемый электропривод | 1988 |
|
SU1629956A1 |
| Электрическая машина | 1985 |
|
SU1267536A1 |
| Устройство для косвенного контроля неравномерности воздушного зазора электрической машины | 1985 |
|
SU1334048A1 |
| Способ косвенного определения эксцентриситета воздушного зазора электрической машины | 1982 |
|
SU1065789A1 |
| УСТРОЙСТВО И СПОСОБ ОЦЕНКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ АСИНХРОННЫХ ДВИГАТЕЛЕЙ | 2019 |
|
RU2711647C1 |
| Устройство для определения характеристик гистерезисного электропривода | 1984 |
|
SU1251276A1 |
К. УСТРОЙСТВО ДЛЯ КОСВЕННОГО КОНТРОЛЯ ДИНАМИЧЕСКОГО ЭКСЦЕНТРИСИТЕТА АСИНХРОННОЙ ЭЛЕКТр||ЧЕСКОЙ МАШИНЫ С ЗУБЧАТЫМ РОТОРОМ, содержащее блок управления электрической машиной, датчик внешнего магнитного поля, предназначенный для размещения на внешней боковой поверхности электрической машины, выпрямитель, блок деления, подключенный к вх9Ду блока индикации и датчик измерения скольжения электрической машины, отличающееся тем, ч-то, с целью повышения точности, в него ввеI дены фильтр зубцовой гармоники, генератор импульсов с входом синхронизации, блок синхронизации, два бло, ка совпадения, два интегрирующих блока с управляющими входами и блок Линии задержки, причем вход генератора импульсов соединен с выходом блока измерения скольжения, а его синхронизирующий вход - с выходом блока синхронизации, который подключен к выходу датчика внешнего магнитного поля, выходы генератора импульсов соединены с первыми входами блоков совпадения, вторые входы которых подключены к выходу выпрямителя, (Л соединенного с выходом фильтра, подключенного к датчику внешнего магс нитного поля, выходы блоков совпадения соединены с входами соответствующих интеграторов, выходы интеграторов подключены к входам блока деления, вход блока линии задержки соединен с выходом блока деления, а эо его выходы - с управляющими входами эо СП ел интеграторов.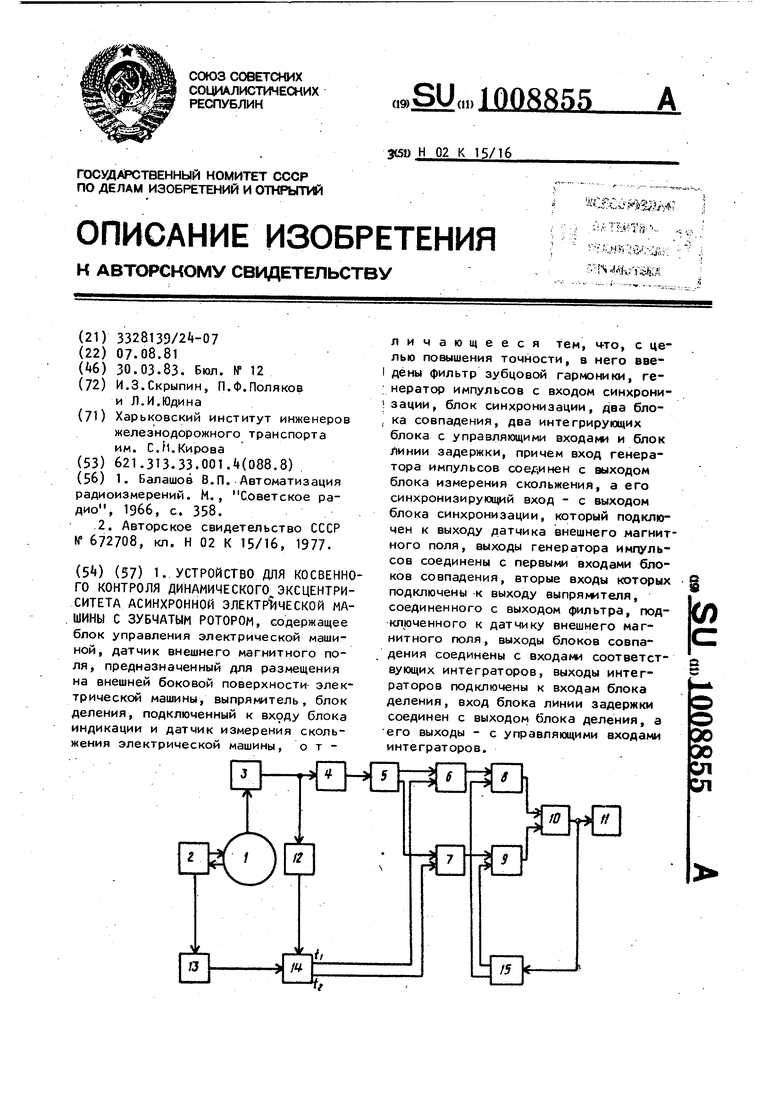
Изобретение относится к электротехнике, преимущественно к электрическим машинам, и предназначено для косвенного контроля. . Известны устройства, содержащие датчики-преобразователи, информация с которых через нормализаторы селек тируется с помощью специального мат ричного коммутатора и подается на вторичный аналого-цифровой преобразователь Недостаток автоматических систем контроля - наличие очень сложного и дорогостоящего оборудования, например управляемого непосредственно вычислительной машиной матричного коммутатора. Наиболее близким к предлагаемому является устройство для косвенного контроля динамического эксцентриситетэ асинхронной электрической маши ны с зубчатым ротором, содержащее блок управления электрической машиной, датчик внешнего магнитного поля, предназначенный для размещения на внешней боковой поверхности элек трической машины, выпрямитель, блок деления, подключенный к входу блока индикации, и датчик измерения сколь жения электрической машины 2 , Недостатком известного устройств является малая точность измерения. Цель изобретения - повышение точ ности контроля. Для достижения поставленной цели в Устройство для косвенного контроля динамического эксцентриситета асинхронной электрической машины с зубчатым ротором, содержащее блок управления электрической машиной, датчик внешнего магнитного поля, предназначенный для размещения на внешней боковой поверхности электрической машины, выпрямитель, блок деления, подключенный к входу блока индикации, и датчик измерения сколь жения электрической машины, введены фильтр зубцовой гармоники, генератор импульсов с входом синхрониза ции, блок синхронизации, два блока совпадения, два интегрирующих блока с управляющими входами и блок линии задержки, причем вход генератора импульсов соединен с выходом блока измерения скольжения, а его синхронизи рующий вход - с выходом блока синхронизации, который подключен к выходу датчика внешнего магнитного поля, выходы генератора импульсов со.единены с первыми входами блоков совпадения, вторые входы которых подключены к выходу выпрямителя, соединенного с выходом фильтра, подключенного к датчику внешнего магнитного поля, выходы блоков совпадения соединены с входами соответствукяцих интеграторов, выходы интеграторюв подключены к входам блока деления, вход блока линии задержки соединен с выходом блока деления, а его выходы - с управляющими входами интеграторов. Блок синхронизации- может быть выполнен в виде последовательно соединенных фильтра низких частот с частотой среза, равной частоте первой гармоники напряжения питания, фазовращателя на угол J7/2, триггера Шмидта и дифференцирующего блока. На чертеже представлена блок-схема устройства. Предлагаемое устройство содержит установленную на боковой поверхности статора асинхронную электрическую машину 1, приводимую в действие пусковым устройством блока 2 управления, датчик 3 внешнего магнитного, поля, усилитель-с|)ильтр k (например, операционный), выпрямитель 5, выходы которого соединены с входами блоков 6 и 7 совпадения, подключенных через соответствующие интегрирующие блоки 8 и 9 к блоку 10 деления, выход которого соединен с входом блока 11 индикации, блок 12 синхронизации, блок 13 измерения скольжения, генератор 14 импульсов и блок 15 линии задержки. Устройство работает следующим образом. На перемещающуюся по конвейеру электри- ескую машину 1 , приближающуюся к испытательному стенду, устанавливают клеммную колодку от электросети. По достижению установленной точки элeктpичecкiaя машина 1 механи- чески воздействует на пусковое устройство блока 2 управления, который запускает машину, приводит в действие приводной механизм датчика 3 внешнего магнитного поля и включает блок 13 скольжения. В датчике 3 индуктируются сигналы всего спектра частот внешнего поля асинхронной машины 1. Сигнал внешнего поля машины 1 с датчика 3 поступает на вход усилителя-фильтра Ц, где выделяется и усиливается сигнал внешнего поля зуб цовой гармоники. .Ввиду того, что выделенный сигнал зубцовой гармоники модулирован, максимум амплитуд этих сигналов наблюда ется в моменты времени, соответству.ющие амплитудным значениям основной гармоники внешнего поля машины 1; Be личины амплитуд сигналов зубцовой гармоники зависят и от положения рот ра. Так, максимальное значение величины амплитуды сигнала зубцовой гармоники наблюдается в момент наибольшего сближения поверхностей расточки статора и ротора, когда магнитное сопротивление зазора является наимен шим, а минимальное значение величины наблюдается в момент наибольшего отклонения поверхностей расточки статора и ротора, т.е. когда ротор сделает полоборота при наличии динамиче кого эксцентриситета и магнитное сопротивление зазора станет минималь ным. Поэтому измерения амплитуд зубцовых гармоник необходимо производит через время 1„ равное половине оборота ротора, т.е. ТР 2-u)(1-S) 2(1-5) где S - скольжение ротора машины; Р - число пар полюсов машины; Т - период основной гармоникиу UJ- угловая частота основной гар моники. Время первого измерения t-j можно выбирать произвольно, но удобнее братьмомент максимума амплитуды Основной гармоники, когда сигнал зубцовой гармоники максимален, т.е. t.,T/4. Блок .12 синхронизации предназначен для подачи короткого импульса в 10 54 момент tp,T/ на стандартный генератор 1 прямоугольных стробирующих импульсов. Синхронизация генератора 14 импульсов по основной гармонике внешнего поля необходима для того, чтобы с выхода генератора 1 шел первый опорный сигнал в виде прямоугольного импульса именно в момент максимума амплитуды первой гармоники, осиочного сигнала датчика Ц. Для этой цели необходим фазовращатель с ре-. гулируемым углом сдвига фаз ср.В чтобы сумма угловЧ угла сдвига фаз фильтра низких частотЧ рнрэвнялась li/2. На выходе дифференцирующей цепи имеется короткий импульс, сформированный в момент перехода сигнала с триггера Шмидта из отрицательных к положительным значениям через нуль. Этот импульс с дифференцирующей цепи поступает на второй вход стандартного генератора It прямоуголь стробирующих импульсов, Сигналы внешнего поля зубцовой гармоники с выходов усилителя-фильтра Ц через выпрямитель 5 поступают на первые входы двух блоков 6 и 7 совпадения. Одновременно с выхода генератора k импульсов в момент амплитуды основной гармоники, идет первый опорный сигнал на второй вход блока 6 совпадения в виде пря-. моугольного импульса длительностью периода зубцовой гармоники т - ТР и-z-P где Z - число зубцов ротора. На второй вход блока 7 совпадения через время ) где S скольжения ротора электрической машины . с генератора 14 импульсов идет второй опорный сигнал такой же длительности и формы. В первом блоке 6 совпадений формируется отрезок сигнала зубцовой гармоники длительностью момент го наибольшей величины, прапорциоальной величине зазора в месте устаовки датчика 3 в момент амплитуды сновной гармоники, а во втором блое 7 совпадения через время t2 форми руется второй отрезок сигнала зубцовой гармоники той же длительности в момент его наибольшей величины. Этот сигнал также пропорционален величине зазора в месте установки, датчика -3 в момент времени, когда ротор сделает половину оборота за время t. С выходов блоков 6 и 7 совпадения каждый сигнал, пропорциональный величине зазора в месте установки датчика 3 сигналов внешнего поля в момент време4 и t- и tj, идет на свой интегрирующий блок 8 и 9. Сигнал с выходов иИт грирующих блоков 8 и 9 noctynaeT на первый и второй входы блока 10 деления, причем деление происходит в мойент поступления сигнала второй вход блока 10 деления, в котором контролируемый сигнал формируют как отношение указанных сигналов. Сброс интегрирующих блоков 8 и 9 осуществляется через линию 15 задержки выходным сигналом блока 10 делестом ходу, так и при нагрузке в условиях эксплуатации, когда по какимлибо причинам невозможно .отключить двигатель. При испытании одиночных двигателей датчик устанавливают вручную на поверхности двигателд, а двиТатель, блок скольжения и генератор импульсов включает оператор.
Устройство позволяет автоматизировать процесс контроля, что позволит сократить время измерений и количество рабочих,занятых контролем,и в итоге повысить точность контроля. ния. Схема подготавливается для следующих измерений. Предлагаемое устройство может быть использовано как для автоматического косвенного контроля динамического эксцентриситета двигателей на потоке электромашиностроительных заводов, так и для косвенного контроля динамического эксцентриситета одиночных двигателей, рабоУающих как на холо
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Балашов В.П | |||
| Автоматизация радиоиэмерений | |||
| М,, Советское радио, 1966, с | |||
| Зажим для канатной тяги | 1919 |
|
SU358A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ косвенного контроля динамического эксцентриситета асинхронной электрической машины | 1977 |
|
SU672708A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
