X
со СП
со
:л
Х

| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АВТОМАТИЧЕСКОЙ НАСТРОЙКИ РЕЗОНАНСНЫХ РЕЖИМОВ КОЛЕБАНИЙ ВИБРАЦИОННОЙ МАШИНЫ С ПРИВОДОМ ОТ АСИНХРОННОГО ДВИГАТЕЛЯ | 2014 |
|
RU2572657C1 |
| СПОСОБ УПРАВЛЕНИЯ АМПЛИТУДОЙ ПРИ АВТОМАТИЧЕСКОЙ НАСТРОЙКЕ НА РЕЗОНАНСНЫЙ РЕЖИМ КОЛЕБАНИЙ ВИБРАЦИОННОЙ МАШИНЫ С ПРИВОДОМ ОТ АСИНХРОННОГО ДВИГАТЕЛЯ | 2017 |
|
RU2653961C1 |
| СПОСОБ ВОЗБУЖДЕНИЯ РЕЗОНАНСНЫХ МЕХАНИЧЕСКИХ КОЛЕБАНИЙ | 2010 |
|
RU2441714C1 |
| НАКЛАДНАЯ ВИБРАЦИОННАЯ МАШИНА ДЛЯ ВЫГРУЗКИ СЫПУЧИХ ГРУЗОВ ИЗ ПОЛУВАГОНОВ | 2000 |
|
RU2181688C2 |
| Установка для вибрационной обработки | 1990 |
|
SU1773695A1 |
| Накладная вибромашина для выгрузки сыпучих грузов из полувагонов | 1984 |
|
SU1303527A1 |
| Устройство настройки, коррекции, формирования и управления динамическим состоянием вибрационной технологической машины и способ для его реализации | 2020 |
|
RU2751042C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ НАСТРОЙКИ И ПОДДЕРЖАНИЯ РЕЗОНАНСНЫХ РЕЖИМОВ КОЛЕБАНИЙ ВИБРАЦИОННОЙ МАШИНЫ С ПРИВОДОМ ОТ АСИНХРОННОГО ДВИГАТЕЛЯ | 2014 |
|
RU2589639C1 |
| СПОСОБ ВОЗБУЖДЕНИЯ РЕЗОНАНСНЫХ МЕХАНИЧЕСКИХ КОЛЕБАНИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2486017C1 |
| Устройство управления динамическим состоянием вибрационной технологической машины | 2019 |
|
RU2734839C1 |

ВИБРАЦИОННАЯ МАШИНА, содержащая мягко виброизолированный ра.бочий орган с установленными на Тнем механи ческими вибровозбудителями,каждый из которых автономно связан с асинхронным электродвигателем, подключенным к выходу блока регулирования, вход связан со следящей системой с подключенными к ней датчи:Ками положения, о т л и ч а ю щ а яс я тем, что, с целью увеличения площади рабочего оогана вибромашины,, она снабжена по числу вибровозбудителей устрсйЧствами для торможения асинхронных электродвигателей, входы которых подключены к следящей систё,ме, причем вибровозбудители размеще(Л ||ны от центра масс рабочего органа на асстряниях ifS-VlJ/M, момент инерции рабочего органа относительно его j-лавной централь ной оси инерции, б е кг-м;М -масса рабочего органа, кг.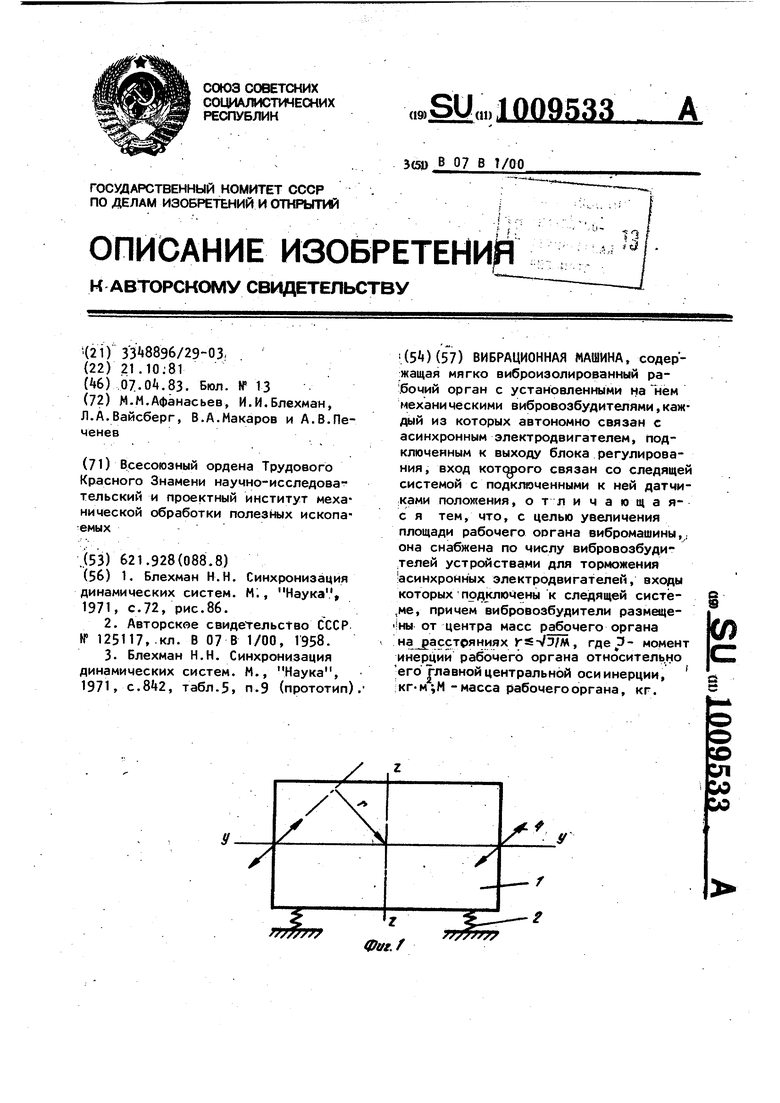
/Я/УУ/Л
г
0ot.f 1 , 1 Изобретение относится к транспорт но-технологическим машинам, а более .конкретно к вибрационной технике, и преимущественно может быть использо вано для рассева и транспортировки сыпучих материалов в строительной и химической промышленности, в черной и цветной металлургии. Известна вибрационная машина, содержащая мягко виброизолированный рабочий орган с установленными на нем самосинхронизирущимися вибровозбудителями дебалансного типа,линия .действия результирующей.силы которых ;Проходит через центр тяжести рабочег . органа EI 1 Основным недостатком такой машины является невозможность приведения в нужное колебательное движение рабочего органа с относительно большо площадью рассева, что предопределяется ограничениями по несущей способ ности подшипников вибровозбудителей. Известна также вибрационная машин содержащая мягко виброизолированный рабочий орган с установленными на нем и приводимыми в движение с помощью асинхронных электродвигателей вибровозбудителями дебалансного типа вращающимися в одинаковых направлениях и расположенными симметрично относительно центра масс рабочего органа, причем для обеспечения самосинхронизации вибровозбудителей последние расположены от центра масс рабочего органа на расстоянии Г 7-/И/АЛ, CD где М - масса рабочего органа; З-мо мент инерции-рабочего органа.относительно главной центральной оси инерции, проходящей параллельно осям валов дебалансов вибровозбудителейГ2 Рабочий орган такой машины совершает колебания в плоскости действия возмущающей силы. Условие Л U по сути своей предопределяет основные параметры машины а также расположение вибровозбудителей на рабочем органе, причем в случае невыполнения условия (1) вибровозбудители не синхронизируются с нужной фазировкой Известна вибрационная машина, содержащая мягко виброизолированный рабочий орган с установленными на .нем механическими вибровозбудителяторого связан со следящей системой с подключенными к ней датчиками положения, снабжена по числу вибровоз33ми, каждый из которых автономно связан с асинхронным-электродвигателем, подключенным электродвигателем, подключенным к выходу блока регулирования, вход которого связан со следящей системой с подключенными к ней датчиками положения. Самосинхронизация вибровозбудителей этого типа машин достигается при условии 7V:i/M. (2; где М - масса рабочего органа; Л-момент инерции рабочего органа относительно главной центральной оси инерции, проходящей перпендикулярно линиям действия вибровозбудителей; г - расстояние между направлением действия возмущающей силы каждого вибровозбудителя и центром масс рабочего органаt3, В случае несоблюдения условия (2 вибровозбудители не синхронизируются с нужной фазировкой. Опыт конструирования вибромашин показывает, что в небольших машинах условиям (1) и (2) удовлетворить достаточно легко, но что касается крупногабаритных машин, то для них практическая реализация этих условий не представляется возможной. Это обстоятельство вынуждает разработчиков вибромашин искать иные технические решения, обеспечивающие фазовую синхронизацию вибровозбудителей более крупных машин, появление которых ожидается в ближайшее время. Таким образ, добиться существенного увеличения площади рабочего органа вибромашины с самосинхронизирующимися вибровозбудителями не представляется возможным, а это, в свою очередь, не позволяет увеличить ее производительность. Целью изобретения является увеличение площади рабочего органа вибромашины. Эта цель достигается тем, что известная машина, содержащая мягко виброизолированный рабочий орган с установленными на нем механическими вибровозбудителями, каждый из которых автономно связан с асинхронным электродвигателем, подключенным к выходу блока регулирования, вход кобудителей устройствами для торможения асинхронных электродвигйтелей, входы которых подключены к следящей системе, причем вибровозбудители размещены от центра масс рабочего органа на расстояниях .
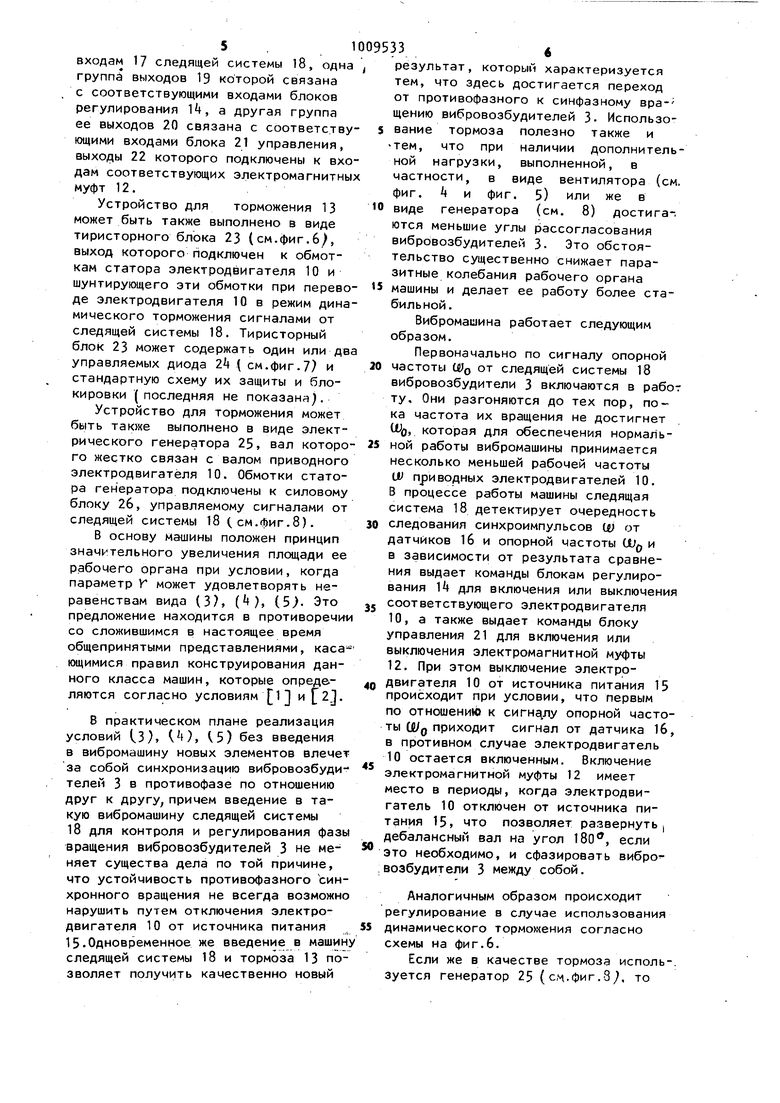
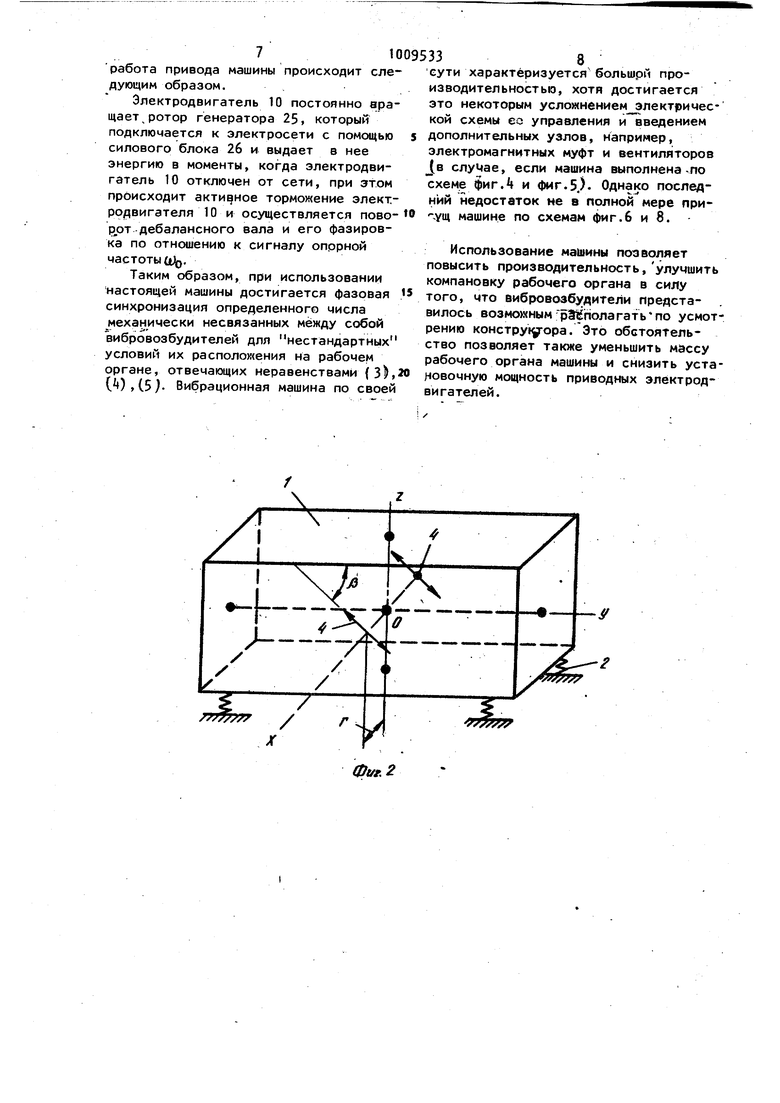
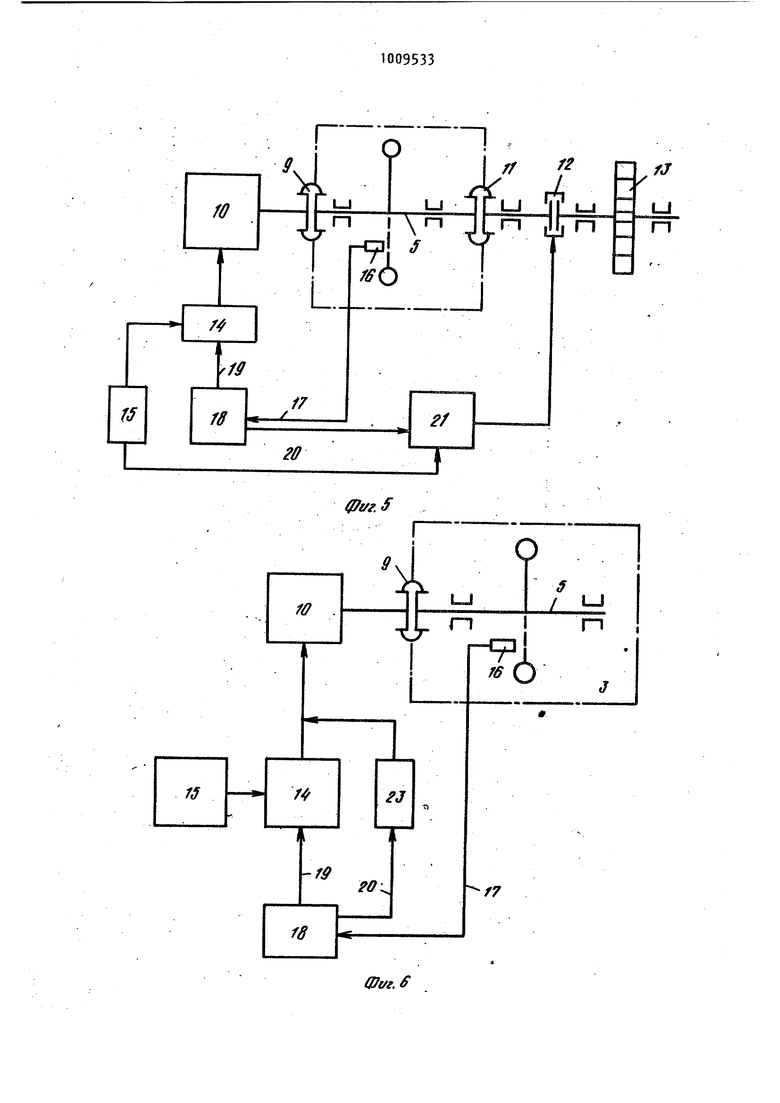
Г У57м J J- момент инерции рабочего орг на, относительно его главной центральной оси инерции, М - масса рабочего органа, кг. На фиг.1 представлен вид сбоку рабочего органа вибромашины с установленными на нем вибровозбудителям направленного действия, расположенн ми относительно центра масс рабочег органа симметрично в его плоскости симметрии, включающей главную центральную ось инерции УУ с минимальныммоментом инерции; на фиг.2 рабочий орган с установленными на нем вибровозбудителями направленного действия, расположёнными вне его плоскости симетрии включающей главную центральную ось OV инерции с минимальным моментом инерции D), симметрично относительно этой плоскости, так что плоскость, включаю|щая линии действия возбудителей, , включает центр масс рабочего органа; на фиг.З - вид сбоку рабочего органа с установленными на нем вибр возбудителями дебалансного типа , вращающимися в одинаковых направ-. лениях и расположенными симметрично относительно центра масс рабочего органа; на фиг.г--принципиальная схема (в одноканальном исполнений привода для вибромашины по фиг.1 и фиг.2 с устройством для торможения, содержащим вентилятор; на фиг. то же, для вибромашины на фи г.3; на фиг.6 - то же, с устройством ди найического торможения электродвигателя; на фиг.7 - устройство динам ческого торможения электродвигателя ; на фиг.8 - принципиальная схема {в одноканальном исполнении) привода дл вибромашины на фиг.З с устройством для торможения. На фиг.1-3 приведены принципиальиые схемы рабочих органов вибромашийы, в которой преимущественно может .быть использовано изобретение, при
этом параметр Г в указанных машинах выбирается из условия: для фиг.1
УЭ/М ,
/Ci)
для фиг.2
;(47
Vv, где :Jv,cos |b -Usih4b 3 z моменты инерции рабочего органа относительно его главных .центральных осей инерции V , Z ; ft -угол между линией действия вибровозбудителя и линией главного габарита рабочего органа. Для фиг.З V- V2D/| A Вибромашина содержит рабочий орган П, установленный на виброизоляторах 2 и несущий вибровозбудители 3 и 4 направленного действия (фиг.1 И фиг.2) или же с круговыми колебаниями рабочего органа (фиг.З). Вибровозбудйтель 3 может состоять либо из двух дебалансных валов 5 и 6, кинематически связанных между собой, напри.мер, посредствсЛ шестерен 7 и 8 fcM. фиг., и вращаюцихся с частотой ш синхронно в противоположных направлениях, либо из одного дебалансного вала 5 (см.фиг.5 . В обоих случаях один конец вала вибровозбудителя 3 посредством, например, эластичной лепестковой муфты 9 связан с приводным асинхронным электродвигателем 10. Другой конец вала вибровозбудителя 3 в конструкциях по фиг.4 и фиг.5 посредством другой эластичной лепестковой муфты 11 И магнитоуправляемой муфты 12 связан с устр.ойством 13 для торможения электродвигателя 10 при его регулирований, выполненным, в частности, в виде вентилятора. Электродвигатель 10 посредством блока регулирования И подключен к источнику питания 15. Для контроля фазы вращения вибровозбудителей 3 установленных На рабочем органе. 1 машины., в каждый из них введен датчик положения 16, функционально связанный с дебалансным валом 5- Датчики 16 подключены к
входам 17 следящей системы 18, одна группа выходов 19 которой связана с соответствующими входами блоков регулирования 14, а другая группа ее выходов 20 связана с соответствующими входами блока 21 управления, выходы 22 которого подключены к входам соответствующих электромагнитных муфт 12.
Устройство для торможения 13 может быть также выполнено в виде тиристорного блока 23 (см.фиг.6, выход которого подключен к обмоткам статора электродвигателя 10 и шунтирующего эти обмотки при переводе электродвигателя 10 в режим динамического торможения сигналами от следящей системы 18. Тиристорный блок 23 может содержать один или два управляемых диода 24 ( см.фиг.7 и стандартную схему их защиты и блокировки (последняя не показана.
Устройство для торможения может быть также выполнено в виде электрического генератора 25, вал которого жестко связан с валом приводного электродвигателя 10. Обмотки статора генератора подключены к силовому блоку 26, управляемому сигналами от следящей системы 18 (см.фиг.8).
В основу машины положен принцип значительного увеличения площади ее рабочего органа при условии, когда параметр Г может удовлетворять неравенствам вида (3, (4), (5). Это предложение находится в противоречии со сложившимся в настоящее время общепринятыми представлениями, касающимися правил конструирования данного класса машин, которые определяются согласно условиям J и 2..
В практическом плане реализация условий О), (О, 5) без введения в вибромашину новых элементов влечет за собой синхронизацию вибровозбудителей 3 в противофазе по отношению друг к другу, причем введение в такую вибромашину следящей системы 18 для контроля и регулирования фазы вращения вибровозбудителей 3 не меняет существа дела по той причине, что устойчивость противофазного синхронного вращения не всегда возможно нарушить путем отключения электродвигателя 10 от источника питания 15.Одновременное же введение в машин следящей системы 18 и тормоза 13 позволяет получить качественно новый
результат, который характеризуется тем, что здесь достигается переход от противофазного к синфазному вращению вибровозбудителей 3. Использование тормоза полезно также и тем, что при наличии дополнительной нагрузки, выполненной, в частности, в виде вентилятора (см, фиг. 4 и фиг. 5) или же в виде генератора (см. 8) достига-, ются меньшие углы рассогласования вибровозбудителей 3. Это обстоятельство существенно снижает паразитные колебания рабочего органа
5 машины и делает ее работу более стабильной.
Вибромашина работает следующим образом.
Первоначально по сигналу опорной
0 частоты Шо от следящей системы 18 вибровозбудители 3 включаются в работ ту. Они разгоняются до тех пор, пока частота их вращения не достигнет 0, которая для обеспечения нормальной работы вибромашины принимается несколько меньшей рабочей частоты иУ приводных электродвигателей 10. В процессе работы машины следящая система 18 детектирует очередность следования синхроимпульсов ty от датчиков 16 и опорной частоты (JU и в зависимости от результата сравнения выдает команды блокам регулирования 14 для включения или выключения соответствующего электродвигателя 10, а также выдает команды блоку управления 21 для включения или выключения электромагнитной муфты 12. При этом выключение электродвигателя 10 от источника питания 15 происходит при условии, что первым
по отношению к сигналу опорной частоты Шл приходит сигнал от датчика 16, в противном случае электродвигатель 10 остается включенным. Включение электромагнитной муфты 12 имеет место в периоды, когда электродвигатель 10 отключен от источника питания 15, что позволяет развернуть, дебалансный вал на угол 180, если
ЭТО необходимо, и сфазировать вибро возбудители 3 между собой.
Аналогичным образом происходит регулирование в случае использования динамического торможения согласно схемы на фиг.6.
Если же в качестве тормоза исполь-. зуется генератор 25 (с.ч.фиг.З, то 710 работа привода машины происходит следующим образом. Электродвигатель 10 постоянно вращает, ротор генератора 25, который подключается к электросети с помощью силового блока 2б и выдает в нее энергию в моменты, когда электродвигатель 10 отключен от сети, при этом происходит активное торможение электродвигателя 10 и осуществляется повоPJOT дебалансного вала и его фазировка по отношению к сигналу опорной частоты OJ. Таким образом, при использовании настоящей машины достигается фазовая синхронизация определенного числа механически несвязанных между собой вибровозбудителей для нестандартных условий их расположения на рабочем органе, отвечающих неравенствами ( 3К (.(S) Вибрационная машина по своей
У / 33 сути характеризуетсябольшрй производительностью, хотя достигается это некоторым усло«нением электрической схемы ее управления и введением дополнительных узлов, например, электромагнитных муфт и вентиляторов (в слумае, если машина выполнена-по схеме фиг Л и фиг. 5,)- Однако последний недостаток не в полной мере при.ущ машине по схемам фиг.6 и 8. Использование машины позволяет повысить производительность,улучшить компановку рабочего органа в силу того, что вибровозбудители предста- . вилось возможнымрЗ полагатьпо усмотрению KOHcTpyiyopa. Это обстоятельство позволяет также уменьшить массу рабочего органа машины и снизить уста ювочную мощность приводных элёктродвигателей.
Фаг.
Г
fj
(JJve.ff
10
Ц} иг. 7
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Блехман Н.Н | |||
| Синхронизация динамических систем | |||
| Mi, Наука ., 1971, С.72, рис.86 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Синхронизация динамических систем | |||
| М., Наука, 1971, с.842, табл.5, п.9 (прототип) | |||
