Предлагаемое изобретение относится к вибрационной технике и может быть использовано при модернизации вибрационного технологического оборудования, используемого в различных отраслях промышленности.
В современных производствах в последние годы достаточно широкое распространение получили вибрационные технологические машины. Основой таких технических объектов является вибрирующий рабочий орган в виде протяженного твердого тела, совершающего, чаще всего, симметричные колебания. Это позволяет создавать сложные процессы взаимодействия рабочих сыпучих смесей с поверхностями деталей, создавая эффекты вибрационного упрочнения, зачистки и модификации свойств обрабатываемых объектов сложной формы [1, 2]. Вибрационные машины работают в условиях интенсивных динамических нагружений, что требует обеспечения не только надежности и безопасности реализации технологических функций, но и возможностей настройки и коррекции вибрационных состояний рабочих органов, формирования определенных динамических состояний, управления параметрами технологического процесса; это достигается созданием соответствующих подходов, способов и средств, которые находят отражение в конструктивно-технических решениях.
В процессе патентного поиска выявлен ряд изобретений-аналогов.
Известно изобретение [Серга Г.В., Резниченко С.М. «Вибрационная машина для предпосевной обработки семян», 2585476, МПК А01С 1/00, приоритет 27.05.2016], содержащая шлифовальный барабан, внутренняя поверхность которого покрыта слоем резины, с разгрузочным окном, рабочий орган, бункер-дозатор, выгрузной лоток, установленные упруго на основании. Шлифовальный барабан выполнен коническим, многозаходным, винтовым и смонтирован из направляющих элементов, выполненных из трех и более скрученных по винтовой линии в продольном направлении относительно продольной оси и изогнутых по винтовой линии в поперечном направлении на оправке в виде параболоида вращения полос, выполненных с боковыми кромками выпуклой криволинейной формы, с напусками и описанных кривыми различного порядка и степени кривизны. При этом по всей длине внутри шлифовального барабана образованы напуски в виде винтовых лопастей, причем по всей длине шлифовального барабана смонтирована коническая пружина с плоским сечением витков и с устройством для изменения шага витков путем растяжения или сжатия пружины. Упрощенная конструкция устройства позволяет расширить его технологические возможности.
Рассматриваемое изобретение имеет рад недостатков, к которым можно отнести отсутствие устройств регулирования динамического состояния и математического моделирования эффектов, возникающих при работе вибрационной машины.
Известна вибрационная машина [Антипов В.И., Антипова Р.И., Кошелев А.В., Денцов Н.Н. «Вибрационная транспортирующая машина», 2532235 С2, МПК В06В 1/00, приоритет 27.10.2014], представляющее собой вибрационную транспортирующую машину с рабочим органом, соединенным упругой связью с реактивной частью, несущей средство для сообщения резонансных однонаправленных колебаний, и амортизаторы малой жесткости, отличающаяся тем, что средство для сообщения резонансных однонаправленных колебаний выполнено в виде смонтированных на реактивной части машины, по меньшей мере, пары одинаковых параметрических вибровозбудителей, установленных с возможностью вращения роторов инерционных элементов в противоположных направлениях в вертикальных плоскостях и приводимых во вращение от независимых электродвигателей, а резонансная частота средства для сообщения резонансных однонаправленных колебаний определяется из соотношений ω=λ1+λ2, λ1=ν⋅ω, 0<ν<l, где ω - усредненное значение парциальных угловых скоростей роторов, λ1 - эффективная собственная частота качающихся маятников роторов инерционных элементов, λ2=√(C/Mпр) - парциальная собственная частота рабочего органа, соответствующая противофазной форме однонаправленных свободных колебаний, Mпр=M1M2/(M1+M2) -приведенная масса, С - жесткость упругой связи, М/ - масса рабочего органа, М2 - общая масса реактивной части машины.
К недостаткам данного изобретения можно отнести отсутствие средств регулирования динамического состояния вибрационной машины.
Известно изобретение [Каварма И.И., Кальницкий A.M., Кондратенко В.Ф., Горбачев Ю.Г. «Вибрационный привод для машин с круговыми колебаниями рабочего органа», 2028264, МПК B65G 27/20, приоритет 09.02.1995], представляющее собой вибрационный привод, содержащий вибратор, в корпусе которого на подшипниках установлен дебалансный вал, соединенный посредством упругой муфты с электродвигателем. Корпус закреплен в центре тяжести рабочего органа вибромашины, установленного посредством упругих опор на неподвижной раме. На этой же раме смонтирован электродвигатель. Муфта имеет ведущую полумуфту, закрепленную на валу двигателя, и ведомую полумуфту, закрепленную на дебалансном валу. Между собой полумуфты связаны упругими элементами, выполненными, например, в виде лепестков из конвейерной ленты. На полумуфте дополнительный дебаланс закреплен синфазно с дебалансным валом при зарезонансной настройке машины или протифазно при ее дорезонансной настройке.
Недостатками рассматриваемого аналога являются сложность регулирования динамического состояния вибрационной машины, а также отсутствие математического описания работы вибрационной машины.
За прототип принимается способ [Пановко Г.Я., Шохин А.Е., Бармина О.В., Горбунов А.А. «Способ управления амплитудой при автоматической настройке на резонансный режим колебаний вибрационной машины с приводом от асинхронного двигателя», 2572657, МПК В06 В 1/16, приоритет 15.05.2018], заключающийся в том, что на рабочий орган вибрационной машины воздействуют периодической возмущающей силой, которая возникает при вращении дебаланса инерционного вибровозбудителя с приводом от асинхронного электродвигателя, частоту вращения дебаланса изменяют за счет изменения частоты питающего напряжения в зависимости от величины сдвига фаз между колебаниями рабочего органа и периодической возмущающей силой, при этом определение величины сдвига фаз проводят по сигналам с датчика углового положения дебалансов и датчика колебаний рабочего органа.
К недостаткам прототипа отнести отсутствие внимания к вращательной степени свободы движения рабочего органа и математического описания возникающих при работе эффектов.
Задачей предлагаемого изобретения является настройка динамического состояния вибрационной технологической машины при помощи изменения приведенной жесткости упруго-массовой структуры.
Устройство настройки, коррекции, формирования и управления динамическим состоянием вибрационной технологической машины, состоящее из рабочего стола, приводов, блока управления и вибродатчиков, отличающееся тем, что дополнительно включен блок настройки и коррекции, содержащий два массоинерционных элемента, расположенных на концах стержней и соединенных между собой упругим элементом в верхней части, причем к массоинерционным элементам присоединены дополнительные пневмобаллоны с возможностью регулирования давления воздуха в них за счет информации, поступающей с вибродатчиков, что обеспечивает настройку и управление динамическим состоянием вибрационной машины.
Способ настройки, коррекции, формирования и управления динамическим состоянием вибрационной технологической машины по п. 1, включающий настройку, регулирование и управление по п. 1, отличающееся тем, что настройку и управление колебаниями рабочего стола осуществляют с помощью дополнительно устанавленного блока настройки и управления и регулируемых пневмобаллонов, соединенных с массо-инерционными элементами, что позволяет снизить время на настройку и регулирование колебаний рабочего стола.
Суть изобретения поясняется чертежами.
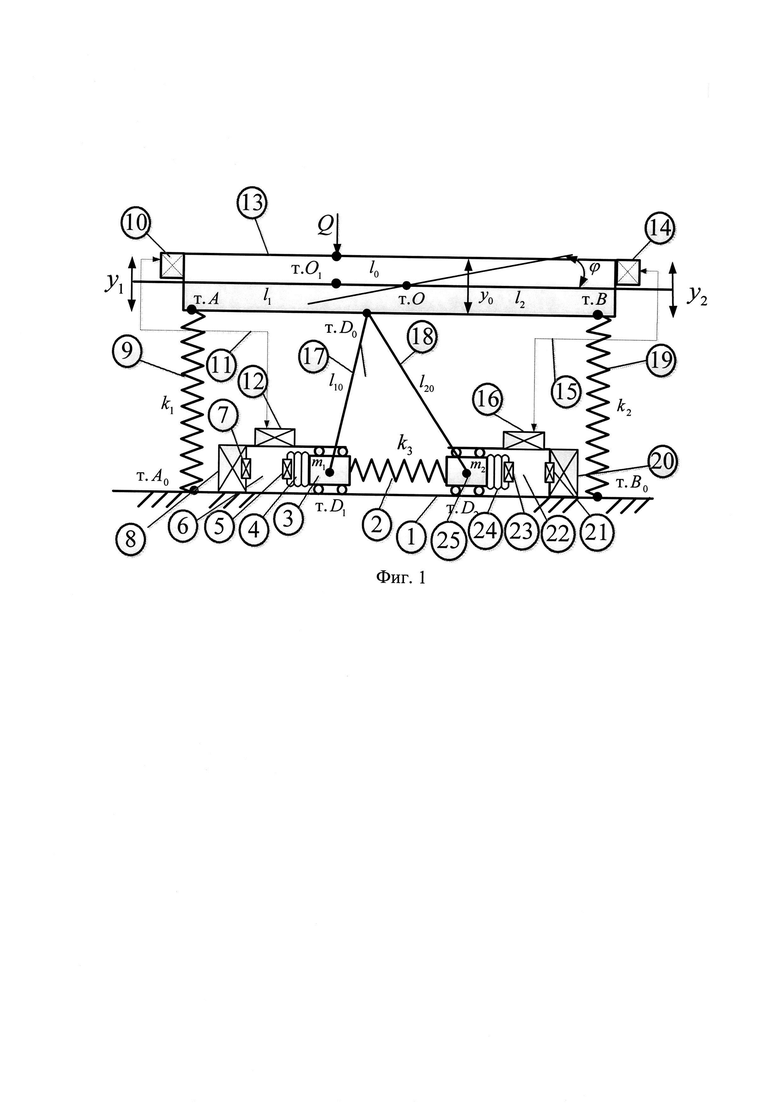
Фиг. 1 иллюстрирует принципиальную схему вибрационной технологической машины, содержащую опорную поверхность 1, упругие элементы 2, 9, 19, массо-инерционные элементы 3, 25, пневмобаллоны 4, 24, управляемые дроссели 5, 7, 21, 23, демпферные камеры 6, 22, компрессоры 8, 20, виброизмерительные датчики 10, 14, коммуникации 11, 15, блоки обработки информации и управления 12, 16, рабочий орган 13, стержни 17, 18.
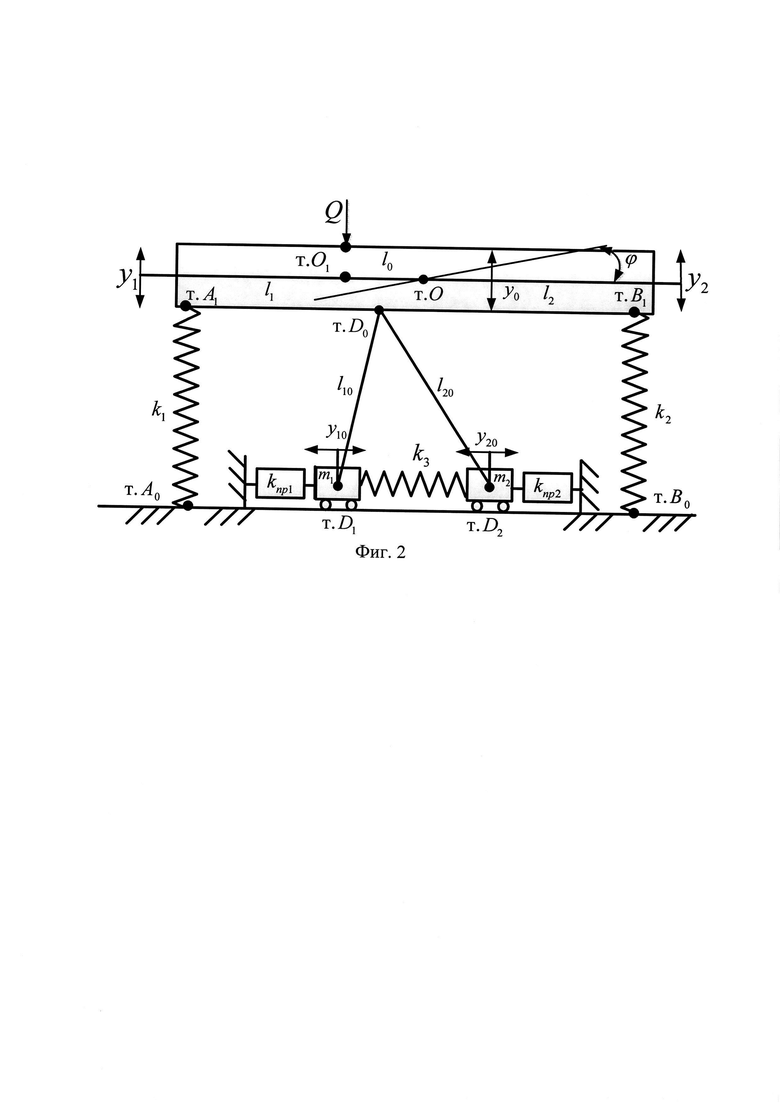
На фиг. 2 приведена расчетная схема вибрационной технологической машины.
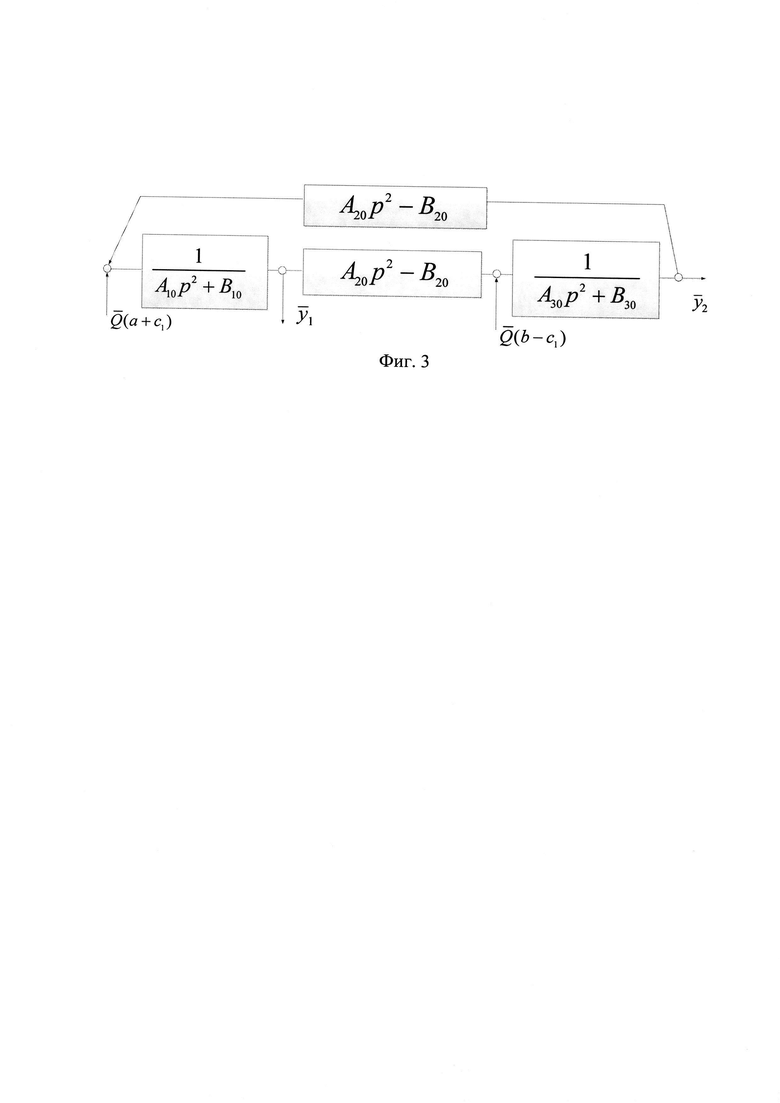
На фиг. 3 показана структурная схема исходной системы по фиг. 2. Изобретение работает следующим образом.
Предлагаемое изобретение осуществляется механической колебательной системой, которая состоит из рабочего органа 13 в виде твердого тела, обладающего массой М и моментом инерции J относительно центра масс (т. О), установленного на опорной поверхности 1 через упругие элементы 9, 19 (пружины) с коэффициентами жесткости k1 и k2 соответственно. Вибрационное движение рабочего органа 13 инициируется вибровозбудителем, условно показанном на фиг 1 гармонической силой Q, приложенной к точке O1 на расстоянии l0 от центра масс объекта (т. О). движении твердого тела 13 описывается координатами у1 и у2 в системе координат, связанных с неподвижным базисом. Особенность технического объекта заключается в том, что что сформирован управляемый колебательный контур (устройство), который состоит из двух рычажных механизмов (стержни 17, 18), соединяющихся в один шарнирный узел в т. D на рабочем органе 13, а в точках D1 и D2 - с массо-инерционными элементами 3 и 25 с массами т1 и т2. Элементы 3 и 25 соединены между собой упругим элементом 2, имеющим жесткость k3. Массо-инерционные элементы имеют возможности перемещаться поступательно по ложементам общего корпуса, в котором они также соединяются через пневмобалонные упруго-кордные элементы 4 и 25 соединяются с демпферными камерами 6 и 22. Демпферные камеры 6 и 22 имеют управляемые дроссели 5 и 23, с помощью которых могут регулироваться демпфирующие свойства пневмоблоков. Поддержка давления в системе пневмо-упругих элементов осуществляется компрессорами 8 и 20, имеющими соответственно дроссели 7 и 21, обеспечивающие давление в пневмосистеме.
Динамическое состояние рабочего органа контролируется виброизмерительными датчиками 11, 15, которые через цепи коммуникаций 11, 15 связаны с блоками обработки информации и управления 12, 16 обеспечивает заданное функциональное состояние системы. Настройка и коррекция системы производится вручную перед запуском в работу технологического комплекса; в процессе работы параметры системы поддерживаются автоматически.
Теоретическое обоснование
1. Расчетная схема фиг 1 представляет собой механическую колебательную систему с сосредоточенными параметрами, совершающую малые колебания относительно положение равновесия. Под действием гармонического силового возбуждения Q, приложенного в т. O1, где  Твердое тело (рабочий орган вибрационный технологической машины) обладает массой М и моментом инерции J относительно центра масс (т. О). Положение т. О определяется длинами расстояний до т. А1, В1 и составляет l1, l2. Твердое тело опирается на упругие элементы с коэффициентами жесткости k1 и k2. В тт. А0, В0 пружины контактируют с опорной поверхностью неподвижного типа. В т. D рабочего органа закреплены два рычага длинами l10 и l20, соединенные с массо-инерционными элементами m1 и m2 в тт.D1 и D2. Эти элементы соединены между собой упругим элементом жесткостью k3. Вместе с тем, массо-инерционные элементы m1 и m2 соединены в горизонтальном движении с ограничительными пневмо-упругими блоками. Каждый из блоков состоит из последовательно соединенных пневмобаллонов (упругих элементов) и демпферных жестких камер, которые связаны между собой (каждая пара) дросселями. Последовательное соединение упругой и демпферной камер с учетом, что свойство дросселирования может быть оценено эквивалентным коэффициентом вязкого трения (по теории Фогта) и может быть представлено через коэффициенты вязкого трения b1 и b2. Это дает возможность структурные образования отобразить обобщенными пружинами с жесткостями kпр1 и kпр2.
Твердое тело (рабочий орган вибрационный технологической машины) обладает массой М и моментом инерции J относительно центра масс (т. О). Положение т. О определяется длинами расстояний до т. А1, В1 и составляет l1, l2. Твердое тело опирается на упругие элементы с коэффициентами жесткости k1 и k2. В тт. А0, В0 пружины контактируют с опорной поверхностью неподвижного типа. В т. D рабочего органа закреплены два рычага длинами l10 и l20, соединенные с массо-инерционными элементами m1 и m2 в тт.D1 и D2. Эти элементы соединены между собой упругим элементом жесткостью k3. Вместе с тем, массо-инерционные элементы m1 и m2 соединены в горизонтальном движении с ограничительными пневмо-упругими блоками. Каждый из блоков состоит из последовательно соединенных пневмобаллонов (упругих элементов) и демпферных жестких камер, которые связаны между собой (каждая пара) дросселями. Последовательное соединение упругой и демпферной камер с учетом, что свойство дросселирования может быть оценено эквивалентным коэффициентом вязкого трения (по теории Фогта) и может быть представлено через коэффициенты вязкого трения b1 и b2. Это дает возможность структурные образования отобразить обобщенными пружинами с жесткостями kпр1 и kпр2.
Полагая, что первая демпферная камера обладает объемом V10, а вторая - V20, введем понятие о жесткости демпферной камеры через k10 и соответственно - для второй камеры - k20. Аналогично для пневмобаллоных блоков с объемом воздуха V1 и V2, введем в рассмотрение эквивалентные упругие элементы с жесткостями k01 и k02. Принимая возможности дросселирования в пневмоблоках как величины коэффициентов вязкого демпфирования, что используется во многих работах, например, в [3], в виде b1 и b2, можно представить пневмоблок как последовательное соединение двух звеньев: демпферный блок имеет параллельное соединение упругого и демпфирующего элементов; при этом общая приведенная (обобщенная) жесткость для демпферной и упругой частей определяется последовательным соединением элементов. Конкретные значения kпр1 и kпр2 будут приведены далее.
Движение рассматриваемой системы описывается уравнениями в системе координат у1, у2, связанных с неподвижным базисом. Связь между движением точке D, расположенной на рабочем органе, и упруго-массовой системой осуществляется через соотношения  ;
;  ; выбор параметров рычажной системы представляет возможности устранения явлений самоторможения.
; выбор параметров рычажной системы представляет возможности устранения явлений самоторможения.
Для вывода дифференциальных уравнений движения как математической модели исходной системы по фиг 2 используются уравнения Лагранжа 2-го рода [4].
2. Для последующих выкладок используются следующие соотношения

Для упруго-демпфирующих блоков приведенные жесткости определяются выражениями
3. Определение координат y10 и y20. Координата точки D (фиг. 3) определяется выражением

Механизм передачи движения от т. D к тт. D1, D2, связанным с массаинерционными элементами m1 и m1 осуществляется через стержни l10 и l20 соответственно. Связь между параметрами движения тт. D D1, D2 определяется через использование мгновенного центра скоростей, формирующего перемещение тт. D1 и D2 в плоском движении стержней l10 и l20, что, учитывая малость смещений в тт. D, D1, D2, можно, в упрощенном виде, записать через следующие соотношения

где коэффициент связи координат i1 и i2 определяются при рассмотрении движения стержней l10 и l20 как плоского вращения вокруг мгновенного центра скоростей [5]; при этом
Здесь  и
и  - расстояния от опорной неподвижной поверхности до соответствующих тт. А1, В1. Предполагается, что в исходном начальном положении рабочий орган расположен параллельно опорной поверхности. Преобразуем выражения связи координат, полагая, что
- расстояния от опорной неподвижной поверхности до соответствующих тт. А1, В1. Предполагается, что в исходном начальном положении рабочий орган расположен параллельно опорной поверхности. Преобразуем выражения связи координат, полагая, что

В данном случае

где a1=a+cl00, b1=b-cl00.
С учетом полученных соотношений можно записать выражения для кинетической и потенциальной энергий
Опуская известные детали получения дифференциальных уравнений во временной области, запишем уравнения движения в операторной форме, сделав в соответствии с [4] преобразованием Лапласа при нулевых начальных условиях:


4. Используя (14), (15), можно построить структурную схему, приняв, что уравнения можно переписать в виде


В уравнениях (16), (17) приняты обозначения: р=jω (j=√-1) комплексная переменная, значок <-> над переменной означает ее изображение по Лапласу [4].
Структурная математическая модель исходной системы, представленная уравнениями (16), (17), может быть интерпретирована как структурная схема эквивалентной в динамическом отношении системы автоматического управления (фиг. 3).
В структурной схеме приняты следующие обозначения: 





Приведенные жесткости пневмоблоков определяются выражениями (2) и(3).
Используя структурную схему на фиг. 3, можно получить передаточные функции системы с учетом особенностей введения дополнительных связей, а также влияния совместного действия вибрационного возбуждения по двум координатам  и
и 



является частотным характеристическим уравнением системы.
Особенностью системы является то обстоятельство, что в ее структуру вводятся структурные образования (пневмоблоки), которые обладают приведенными жесткостями kпр1 и kпр2: выражения (2), (3).
Приведенная жесткость отображается дробно-рациональным выражением и может рассматриваться как некоторая локальная передаточная функция. При b10→0 и b1→∞ kпр1 трансформируется в обычной упругий элемент с жесткостями
Аналогично для kпр2 имеем при b20→0 и b2→∞ (2), (3) трансформируются в обычной упругий элемент с жесткостями
При b10→0 и b20→0 приведенные жесткости будут оказывать влияние на значения передаточных функций (и на числитель и на знаменатель), что будет рассмотрено далее.
5. При условиях низкого демпфирования (b10→0, b20→0) kпр1 трансформируется в k'пр1, определяемое выражением (27), в свою очередь, при b20→0 k'пр2 будет определяться выражением (29). В обоих случаях в системе будет рассматриваться только участие упругих элементов с постоянными жесткостями:
Для случаев, когда b10≠0 и b20≠0, kпp1 и kпр2 будут влиять на форму числителей и знаменателей передаточных функций, что требует отдельного рассмотрения.
6. Особенности вибрационного поля рабочего органа в плане рассмотрения распределенной амплитуд колебаний твердого тела по его длине, могут быть оценены с помощью передаточной функции межпарциальных связей:
7. Случай, когда блоки настроены на режим b1→0 или b1→∞, что соответствует режиму использования только упругих свойств пневмоблоков (а не демпфирующих). Полагая, что пневмоблоки работают в одинаковых режимах, обозначим соответствующие параметры как k'пр1 и k'пр1






С учетом условий b10=0, и b20=0 передаточная функция межпарциальных связей (коэффициент связности) примет вид:

Из выражения (39) следует, что система на определенных частотах будет иметь по одному режиму динамического гашения колебаний по координатам 
 что следует из решения уравнений 2-го порядка,
что следует из решения уравнений 2-го порядка,
получаемых при «обнулении» полиномов числителя и знаменателя передаточной функции межпарциальных связей (39).
Особенностью динамических свойств рассматриваемой системы b10→0, b20→0 (также, как и для случая b10→∞, b20→∞ является возможность «обнуления» межпарциальных связей, что обеспечивает коррекцию или настройку движения по одной координате, не меняя параметров движения по другой координате.
В целом можно отметить, что при «блокировании» пневмоблоков расчетная схема системы трансформируется в систему с двумя степенями свободы с упругоинерционными межпарциальными связями, то есть формируется специфическая динамическая связь, расширяющая возможности коррекции, настройки и формирования динамического состояния системы.
8. При выполнении условий b10≠0 и b20≠0, то есть при использовании возможностей дросселирования в каналах притока воздуха между упругими элементами и демпферными камерами, вибрационные взаимодействия имеют большую сложность. В этом случае передаточные функции структурных образований принимают вид
Учет влияния дросселей приводит к изменению параметров передаточных функций межпарциальных связей





Передаточные функции межпарциальных связей могут быть представлены в виде:
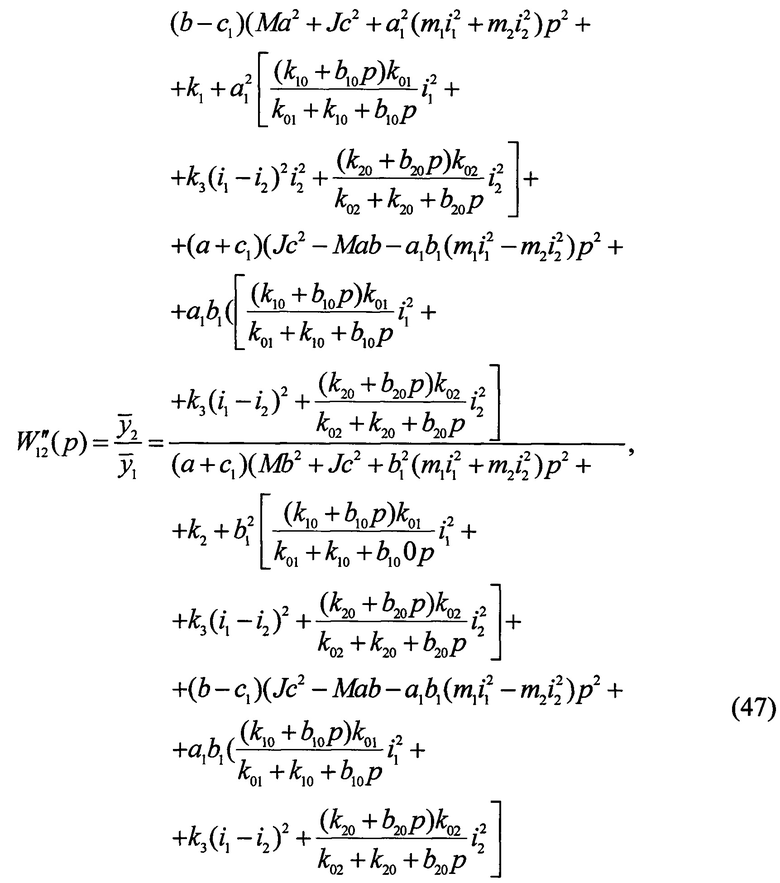
После группировки членов числителя и знаменателя выражение (47) принимает вид:

Выражение (48) является передаточной функции межпарциальных связей или коэффициентом связности, отражающим динамические свойства системы, которая находится под действием двух внешних возбуждений, приложенных к точкам рабочего органа, совершающего движения по координатам 
 Полученная расчетная схема соответствует механической колебательной системе с двумя степенями свободы при наличии в системе трения, определяемого коэффициентами b10 и b20. При увеличении частоты возбуждения в системе можно ожидать появления двух резонансных режимов и динамического гашения колебаний в неявно выраженной форме. При р→∞ система замыкается и выходит на режим с предельным отношением амплитуд колебаний по координатам
Полученная расчетная схема соответствует механической колебательной системе с двумя степенями свободы при наличии в системе трения, определяемого коэффициентами b10 и b20. При увеличении частоты возбуждения в системе можно ожидать появления двух резонансных режимов и динамического гашения колебаний в неявно выраженной форме. При р→∞ система замыкается и выходит на режим с предельным отношением амплитуд колебаний по координатам 

Настройка системы может производиться вручную с определением на основе использования математической модели параметров механической колебательной системы, необходимых для реализации технологического процесса. Предлагаются возможности применения системы автоматического управления, использующей информацию о динамическом состоянии рабочего органа через вибродатчики с ее обработкой и передачи в блоки управления дросселями.
Список использованных источников
1. Копылов Ю.Р. Динамика процессов виброударного упрочнения: монография / Воронеж: ИПЦ «Научная книга», 2011. - 569 с.
2. Махутов Н.А., Петров В.П., Куксова В.И., Москвитин Г.В. Современные тенденции развития научных исследований по проблемам машиноведения и машиностроения/Проблемы машиностроения и автоматизации. 2008. №3. С. 3-19.
3. Логунов А.С.Динамика пневматических элементов и устройств для преобразования движения в системах вибрационной защиты объектов, диссертация на соискание ученой степени кандидата технических наук / Иркутский государственный университет путей сообщения. Иркутск, 2009. 197 с.
4. Елисеев СВ. Прикладной системный анализ и структурное математическое моделирование (динамика транспортных и технологических машин: связность движений, вибрационные взаимодействия, рычажные связи): монография - Иркутск: ИрГУПС, 2018. - 692 с.
5. Лурье А.И. Аналитическая механика. - М.: Наука, 1968. - 720 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство настройки, корректировки и формирования динамического состояния вибрационной технологической машины и способ для его реализации | 2020 |
|
RU2755646C1 |
| Устройство для формирования вибрационного перемещения рабочей среды | 2021 |
|
RU2773825C1 |
| Устройство управления динамическим состоянием вибрационной технологической машины и способ для его реализации | 2020 |
|
RU2755534C1 |
| Устройство формирования специфических режимов динамического состояния рабочего органа вибрационной технологической машины и способ для его реализации | 2020 |
|
RU2756393C1 |
| Устройство коррекции динамического состояния рабочего органа вибрационной технологической машины и способ для его осуществления | 2020 |
|
RU2749987C1 |
| Способ настройки динамического состояния вибрационной технологической машины и устройство для его осуществления | 2018 |
|
RU2718177C1 |
| Способ формирования, настройки и корректировки динамического состояния рабочих органов технологических вибрационных машин на основе введения дополнительных упругих связей и устройство для его реализации | 2019 |
|
RU2749364C2 |
| Устройство формирования и управления динамическим состоянием вибрационной технологической машины и способ для его реализации | 2020 |
|
RU2753843C1 |
| Способ коррекции динамического состояния рабочего органа технологической вибрационной машины с вибровозбудителем на упругой опоре и устройство для его реализации | 2019 |
|
RU2728886C1 |
| Способ изменения и настройки динамического состояния вибрационной технологической машины и устройство для его осуществления | 2018 |
|
RU2710314C1 |
Группа изобретений относится к области машиностроения. Устройство настройки, коррекции, формирования и управления динамическим состоянием вибрационной технологической машины содержит рабочий стол, привод, блок управления и вибродатчики. Блок настройки и коррекции содержит два массоинерционных элемента. Массоинерционные элементы расположены на концах стержней и соединены между собой упругим элементом в верхней части. К массоинерционным элементам присоединены дополнительные пневмобаллоны с возможностью регулирования давления воздуха. Информация поступает с вибродатчиков. Способ включает настройку, регулирование и управление. Настройку и управление колебаниями рабочего стола осуществляют посредством регулируемых пневмобаллонов и блока настройки и управления. Пневмобаллоны соединяют с массоинерционными элементами. Достигается снижение времени на настройку и регулирование колебаний рабочего стола. 2 н.п. ф-лы, 3 ил.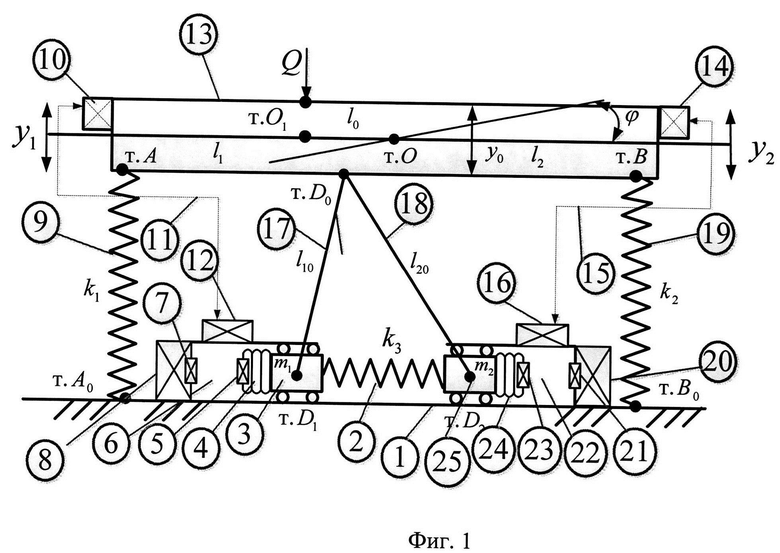
1. Устройство настройки, коррекции, формирования и управления динамическим состоянием вибрационной технологической машины, состоящее из рабочего стола, приводов, блока управления и вибродатчиков, отличающееся тем, что дополнительно включен блок настройки и коррекции, содержащий два массоинерционных элемента, расположенных на концах стержней и соединенных между собой упругим элементом в верхней части, причем к массоинерционным элементам присоединены дополнительные пневмобаллоны с возможностью регулирования давления воздуха в них за счет информации, поступающей с вибродатчиков, что обеспечивает настройку и управление динамическим состоянием вибрационной машины.
2. Способ настройки, коррекции, формирования и управления динамическим состоянием вибрационной технологической машины, реализуемый устройством по п. 1, включающий настройку, регулирование и управление, отличающийся тем, что настройку и управление колебаниями рабочего стола осуществляют с помощью дополнительно установленного блока настройки и управления и регулируемых пневмобаллонов, соединенных с массоинерционными элементами, что позволяет снизить время на настройку и регулирование колебаний рабочего стола.
| СПОСОБ РЕГУЛИРОВАНИЯ ЖЕСТКОСТИ ВИБРОЗАЩИТНОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2475658C2 |
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| Колосоуборка | 1923 |
|
SU2009A1 |
| Пневмовиброизолирующая опора | 1984 |
|
SU1307120A1 |

