со
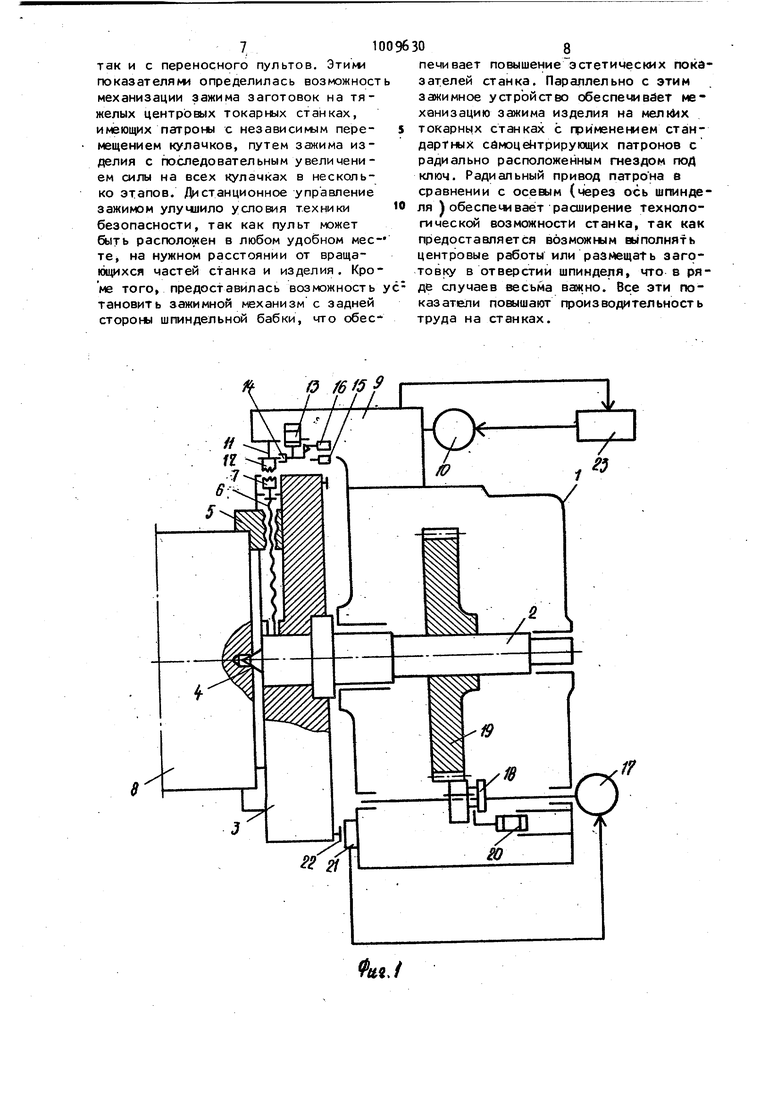
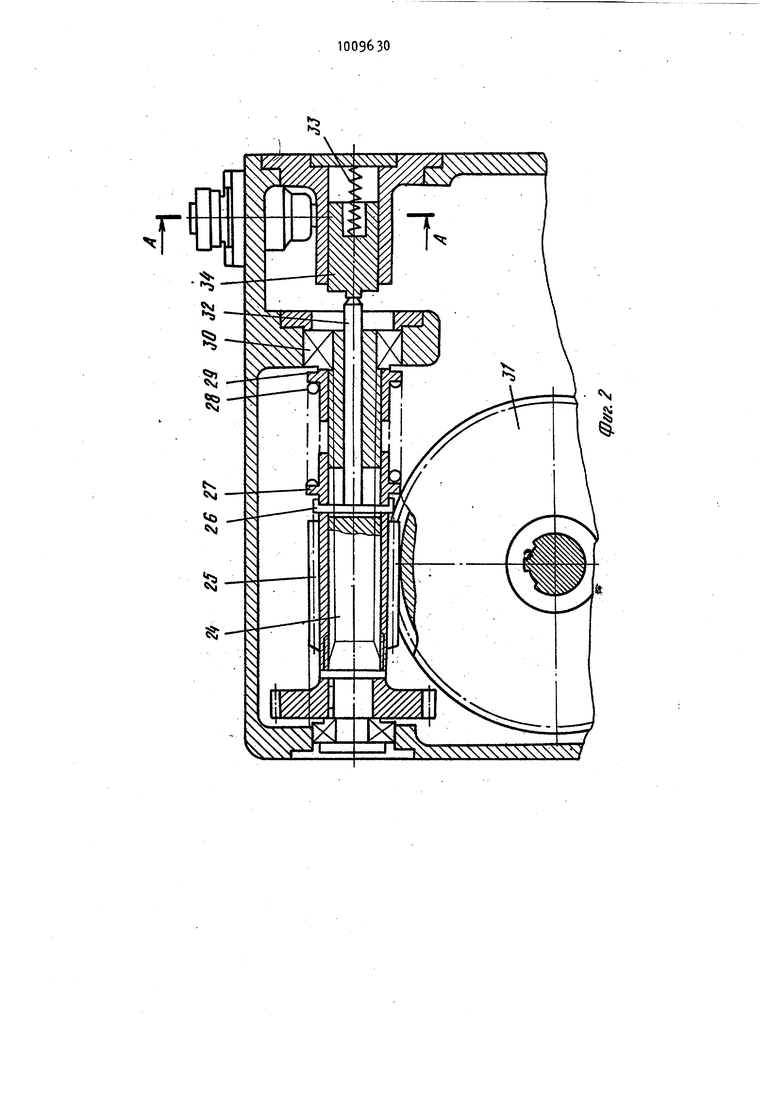
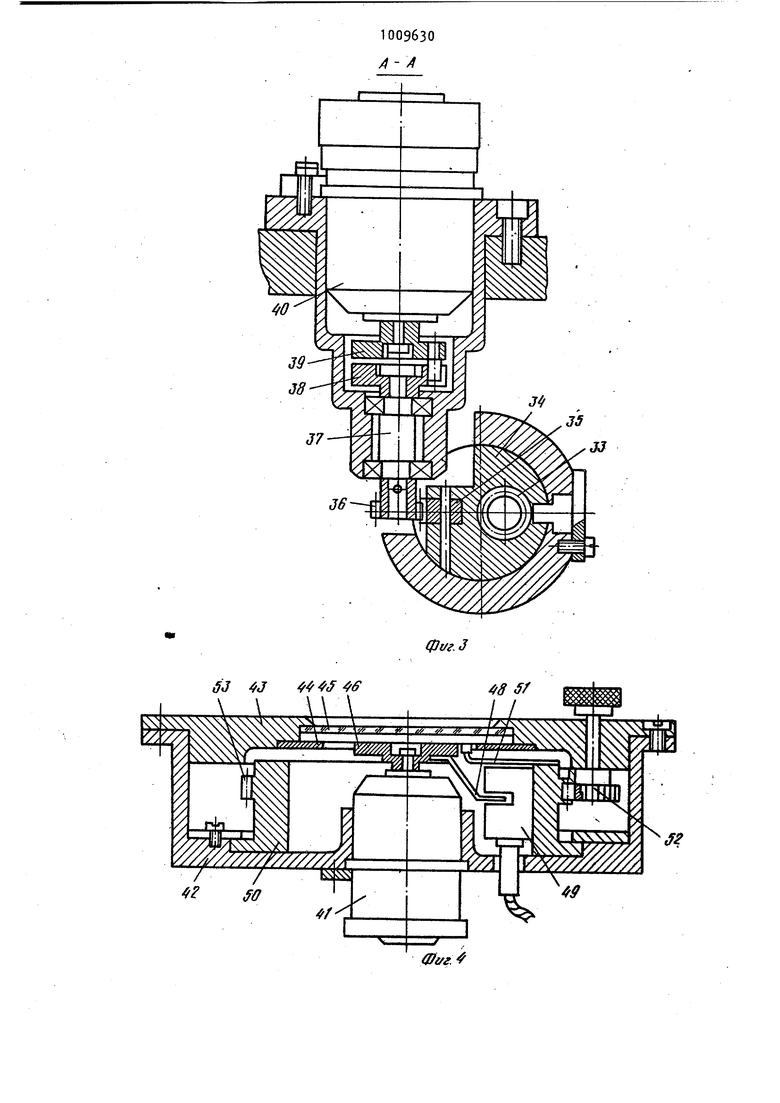
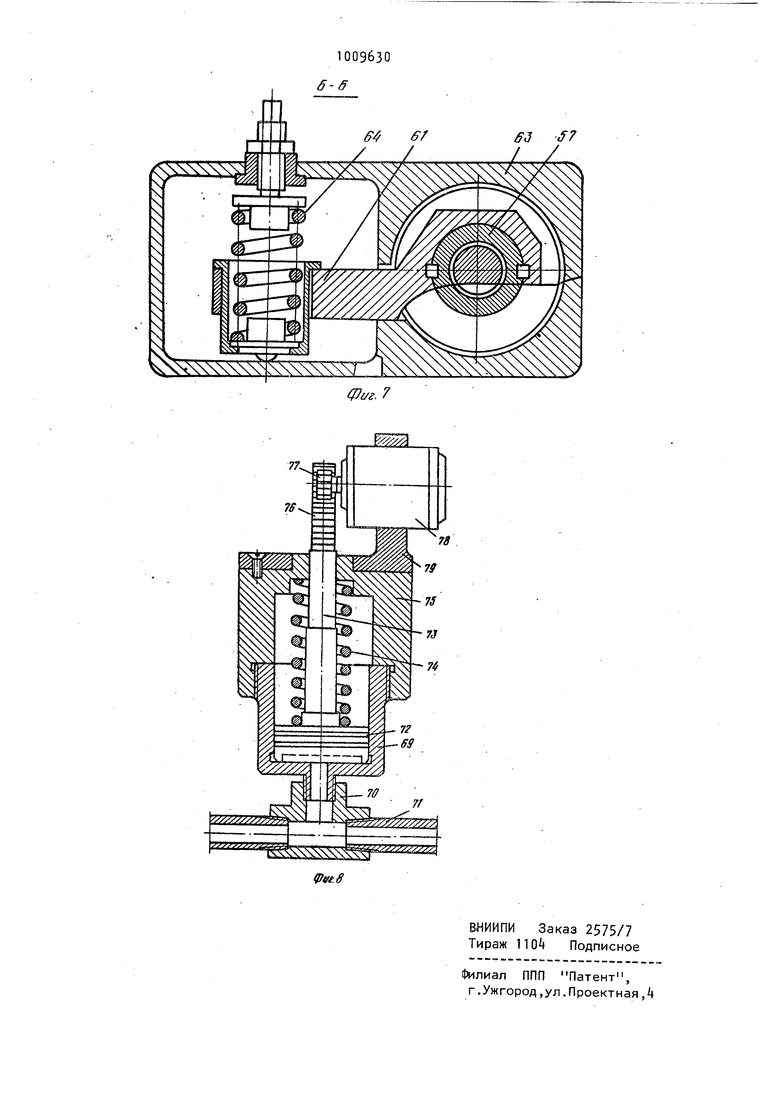
Од 00 1 Изобретение относится к области станкостроения, а более конкретно к зажимным устройствам для станков токарного типа. Известное зажимное устройство со держит патрон, механизм зажима с ре активным датчиком силы, имеющим выходное звено в виде сельсин-датчика а также электрический привод механизма зажима l . В этом устройстве, отличающемся высокой сложностью, не oGecnei веется высокая надежность работы и стабильность силы зажима, а также не может быть обеспечено дистанционное управление силой зажима. Цепью изобретения является обеспечение регулирования и стабилизации силы зажима, а также возможности дистанционного управления величиной силы зажима, Указанная цель достигается тем, что в известном устройстве, содержа щем патрон, механизм зажима с реактивным датчиком силы, имеющим выход ное звено в виде сельсин-датчика, а также электрический привод механизм зажима, устройство снабжено блоком управления величиной силы Ззжима, выполненным в виде корпуса с круговой шкалой, соосно с которой устано лен сельсин-приемник, электрически связанный с упомянутым сельсином-да чиком, снабженным стрелкой - указателем силы зажима, причем в том же ко0пусе с возможностью поворота установлена гильза, на которой закреплен бесконтактный конечный выключатель с экраном, закрепленным на выходному валу сельсина-приемника, при этом на торце гильзы установлен дополнительная стрелка к шкале силы 3 ажи ма, Введение блока управления величиной силы зажима позволяет упростить конструкцию, повысить надежнос устройства и обеспечить дистанционное управление. На фиг. 1 показана схема зажимного устройства; на фиг. 2 - разрез по приводному червяку; на фиг. 3 разрез А-А фиг. 2; на фиг. k - полу конструктивная схема блока управлениявеличиной силы зажима; на фиг.5 шкапа блока управления величиной си лы зажима; на фиг. 6 - зажимной ме ханизм с планетарной передачей; на фиг. 7 - разрез Б-Б фиг. 6-, на фиг. 0 реактивный датчик силы зажима в слу чае использования гидропривода. В корпусе 1 шпиндельной бабки смонтирован шпиндель 2, несущий планшайбу 3 и центр k. В планшайбе 3 равномерно по окружности размещены зажимные кулачки 5. независимо перемещающиеся в радиальном направлении винтом 6, который на выходном конце имеет зубчатую полу муфту 7. Обрабатываемое изделие 8 базируется на центрах Ц передней и задней бабки и зажимается кулачками 5. На шпиндельной бабке закреплен корпус 9, содержащий механизм зажима с приводом от электродвигателя 10, На его шпинделе 11 установлена зубчатая полумуфта 12, которой посредством гидроцилиндра 13 и вилки 14 механизм зажима может быть соединен или рассоединен с полумуфтой 7 любого кулачка. При соединенных полуиуфтах под действием вилки И срабатывает путевой выключатель 15, а при рассоединенных - выключатель 16. Установка любого извосьми кулачков 5 в позицию зажим совмещением оси зажимного кулачка 5 с осью шпинделя 11 осуществляется вращением планшайбы 3 тихоходным электродвигателем постоянного тока 17 рез зубчатые колеса 18-19, зацепление которых включается гидроцилиндром 20 . Остановка планшайбы 3 в нужном положении осуществляется автоматически, через электрическую связь электродвигателя 17 с индуктивным датчиком 21, взаимодействующего с расположенными на планшайбе 3 якорями 22 для каждого из кулачков 5. В механизме зажима установлен датчик силы, который имеет электрическую связь с блоком 23, которым задается нужная сила зажима посредством обратной связи с электродвигателем 10. Для определения силы зажима применен косвенный способ - путем измерения реакции в опоре механизма зажима, т.е. реактивный датчик, как пример механизм содержит червячную передачу (фиг,2) , На шлицевом валу 2k установлен червяк 25, имеющий с одной стороны жесткий осевой упор в бурт вала, а с другой стороны замыкается через чеку 2б и втулку 27 на пружину 28, которая через втулку 29 опирается на радиально-упорный по-дшипник 30. При вращении червячного колеса 31 на отжим изделия осевая сила на червяке действует в направлении бур та на валу 2А, а при зажиме эта сила направлена в противоположную сторону,, под действием которой червяк 25 смещается на шлицах вала 2А и сжимает пружину 28, в зависимости от вели1 1ны силы в пределах зазора между торцами втулок 27 и 29. В отверстии по оси вала 2 у становлен штырь 2, которым обеспечивается постоянный контакт с мекой 26 по средством пружины 33 через шток З. На што.ке 3 смонтирована зубчатая рейка 35 (фиг. 3), имеющая зацепление с зубчатым колесом Зб, которое с помощью вала 37 и полу муфт -38 и 39 имеет связь с осью сельсин а-датчика 40. Этот сельсин-датчик электрически связан с сель си ном-приемником Ц (фиг. k), установленным по оси цилиндрического корпуса 42 блока, задающего величину силы зажима. В крышке АЗ установлена шкапа (}4 с гр дуировкой ступеней силы зажима и стекло 45. На валу сельсина-приемни ка 41 установлен диск 46, несущий стрелку 47 (фиг. 5), показывающую ступень силы зажима, и экран 48, взаимодействующий с путевым выключатеаИем 49. В корпусе также установ лена поворотная гильза 50, на внутренней поверхности отверстия которой прикреплен путевой выключатель 49, а на ее торце-дополнительная стрелка 31 для установки путевого выключателя на нужную ступень силы зажима по шкале 44. Эта установка осуществляется путем поворота гильзы относительно своей оси щэацением зубчатого колеса 52, зацепляемого с колесом 53, а 1полненным непосредственно на гильзе. Механизм эёжима обычно устанавливается с задней стороны шпиндельной бабки в плоскости по высоте цент ров станка. Управление процессом за жима осуществляется дистанционно с отдельного пульта, размещенного спе реди станка. На пульте монтируется блок, задающий силу зажима кнопки, И переключатели управления процессо и сигнальные лампы блокировки. устройства имеет ряд после дрвательных переходов. Изделие 8 уст навливается в иентрах 4 передней и задней бабки. Когда на станке выполняется обдир ка с использованием нескольких суппо тов, для обеспечения-необходимой жес кости крепления, зажим выполняется восьмью кулачками 5 В таком случае зажим предварительно осуществляется четырьмя кулачками 5 и после полного зажима этими кулачками изделие дополнительно зажимается остальными. Зажим каждам кулачком выполняется с автоматическим действием электрооборудования в следующей последовательности . До начала зажима на блоке, эадаю щем силу зажима, дополнительная стрел ка 51 положения конечного выключателя 49 совмещается с первой ступенью шкалы 44 путем поворота гильзы 50 через зубчатые колеса 52, 53. Включением двигателя 17 поворачивается планшайба 3, которая останавливается при положении первого кулачка в позиции Зажим, т.е. при совмещении его оси с осью шпинделя 11 механизма зажима 9. Остановка планшайбы происходит автоматически при совмещении соответствующего якоря 22 с индуктивным дат 1ком 21 через его электрическую связь с электродвигателем 17. Остановкой двигателя 17 подается команда на соединение В1нта 6 с механизмом зажима полумуфтами 7 и 12 гидроцилиндром 13 через ВИЛКУ 14. Включение муфт 7 и 12 определяется действием вилки 14 на путевой выключатель 15, от которого подается команда на пуск двигателя 10 и исполнение зажима. В процессе зажима увеличивается сила, а соответственно увеличивается крутящий момент на валах механи.зма зажима, под дей ст ви ем которо го ..чер вя i 25 сообщается осевое перемещение на шлицевом валу 24 и через чеку 26, втулку 27 сжимает пружину 28 пропорционально силе зажима.- Это перемещение также через чеку 26 и штырь 32 передаётся штоку 3 и посредством 35. зубчатого колеса 36 через вал 37 и полуМУФТЫ 38-39 сообщает поворот якоря сельсина-дат1 1ка 40. Благодаря электрической связи сельсина-датчика 40 с cert ь си ном-приемником 41 (фчг. 4) последнему синхронно сообщается точно на такой же угол поворот якоряи через диск 46 и якорь 48 вводится в действие конечный выключатель 49, который посредст-вом Обратной электрической связи отключает электродвигатель 10 зажимного. устройства. Остановкой этого двигателя .подается «команда на рассоединение полумуфт 7 и 12 KOtopoe определяется действием вилки 4 на путевой выключатель 12, дающий разрешение на пуск двигателя 1 для подвода к зажимному - еханизму следующего кулачка, С таки ми переходами и с той же силой вы пол няе-тся зажим сначала кулачком, противоположным первому, а затем двумя другими кулачками. Дальнейший зажим этиж кулачкаки, в той же последовательности, пpoизвoдиtcя в несколько йтапов с увеличением на каждом усилия путем сбответствующей установки коне иного выключателя 9 по шкале k Эта операция выполняется за- 3- допол нительных этапа. После зажима издеЛИЯ четырьмя кулачками таким же образом, но с максимальной силой выпол няется зажим остальными кулачками. Описанное устройство может 6ь1ть использовано с применением самоцентр рующих патронов. При этом его работа отличается от работы с патронами с независимым перемещением кулачков те что при зажиме или отжиме ось шпинде ля зажимного устройства совмещается и соединяется с осью приводного звена патрона один раз, зажим также выполняется одноразово--с предварительно установленной величиной силы в зависимости от поперечной жесткости закрепляемого изделия. В описанном устройстве выполнение датчика, измеряющего силу зажима с выходным звеном сельсин-датчик, может иметь ряд других вариантов. На фиг. 6 представлен зажи(иной механизм с планетарной передачей, со держащий ведущий вал St с зубчатым кол.есом 55, два сателлита 56 и центральное колесо 57. Водило сателлитов выполнено за одно целое с выходным валом 58. Центральное колесо 57 уста новлено на подшипниках 59 и 60, причем на него жестко насажен рычаг 61 с зубчатым сектором б2, который прижимается к стенке корпуса 63 пружиной 6Д (фиг. 7) с зубчатым сектором 62 входит в Зацепление шестерня 65. которая установлена и закреплена на ос сельсина-датчика 66, закрепленного на корпусе 63. Зажим выполняется пе-г редачей .вращения от зубчатого колеса б7 через электромуфту 68, вал 5 с зубчатым колесом 55, сателлитов 56 и центрального колеса 57 на выходной вал 58. 3 процессе зажима с увеличением реактивного момента на центральном колесе 57 рычаг 61, преодолевая давлеже пружины 6А, осуществляет поворот относительно оси колеса 57 и зубчатым сектором б2 через шестерню б5 сообщает угол поворота якорю сельсина - датчика 66. Величина этого угла пропорциональна моменту на выходному валу 58. При использовании в качестве зажимного механизма гидродвигателя принципиальная схема устанавливаемого датчика приведена на фиг. 8. Корпус датчика б9 через тройник 70 установлен на трубопроводе 71, по которому подается масло при вращении гидродвигателя на зажим изделия , В цилиндре корпуса 69 установлен поршень 72 с штоком 73, взаимодействующий с пружиной 7, зажатой между торцом поршня 72 и крышкой 75. На выходном конце штока нарезана рейка 7б, сцепляемая с зубчатым колесом 77, закрепленным на оси сель си на-датчика 78, который установлен на кронитейне 79 прикрепленном к крышке 75. По мере зажима изделия увеличивается давление масла в трубопроводе 71, под действием koTOporo движется поршень 72 со штоком 73 вверх, преодолевая давление пруйины 7. Этим движением посредством рейки 7б через зубчатое колесо 77 сообщается угол поворота якорю сельсина - датчика 78. Величина этого угла повфота пропорциональна силе зажима изделия гидродвигателем, Применение предлагаемого зажимного устройства может найти широкое использование в станкостроении, так как электромеханические зажимные механизмы в сравнении с гидравлическими обладают существенным преимуществом с тйчки зрения быстродействия, автоматизации и надежности работы, а соответственно достижения зажима с задаваемой силой. В этих механизмах двигатель работает в кратковременные промежутки, только при непосредственном осуществлении зажима и отжима, что обеспечивает высокие энергетические показатели привода. Технико-экономические преимущества предложенного зажимного устройства определяются упрощением конструкции механизма регулирования и , стабилизацией силы зажима и повышения надежности, работы устройства. Возможно дистанционное управление силой зажима как со стационарного. так и с переносного пультов. Этими показателями определилась возможнос механизации зажима заготовок на тяжелых центровых токарных станках, имеющих патроны с независи|-ым перемещением кулачков, путем зажима изделия с последовательным увеличением силы на всех кулачках в несколько этапов. Дистанционное управление зажимом улучшило условия техники безопасности, так как пульт может быть расположен в любом удобном месте, на нужном расстоянии от вращающихся частей ctaHKa и изделия. Кроме того, предоставилась возможность тановить зажимной механизм с задней стороны шпиндельнсЛ бабки, что обес 1 30 печивает повышение эстетических показателей станка. Параллельно с этим зажимное устройство обеспе1 1вйет механизацию зажима изделия на TOKapHbix станках с применением стандартных самоцейтрирующих патронов с радиально расположенным гнездом под ключ. Радиальный привод патрона в сравнении с осевым (через ось шпинделя ) o6ecneiWBaeT расширение технологической возможности станка, так как предоставляется возможным выполнять центровые работы или размещать заготовку в отверстии шпинделя, что в ряде случаев весьма важно. Все эти показатели повышают производительность труда на станках.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для центрирования изделия при зажиме | 1981 |
|
SU1000158A1 |
| Токарный патрон | 1978 |
|
SU747034A1 |
| ЗАЖИМНОЕ УСТРОЙСТВО ДЛЯ МЕТАЛЛОРЕЖУЩИХ СТАНКОВ | 1968 |
|
SU209178A1 |
| Шпиндельная бабка | 1987 |
|
SU1604505A1 |
| Металлорежущий станок | 1974 |
|
SU519315A1 |
| Токарный патрон с устройством для управления радиальным перемещением кулачков | 1983 |
|
SU1123794A1 |
| Устройство для управления перемещением кулачков токарного патрона | 1982 |
|
SU1076206A1 |
| Передняя бабка токарного станка | 1982 |
|
SU1093553A1 |
| Электромеханический привод зажимного устройства | 1983 |
|
SU1235664A1 |
| Механизированный привод самоцентрирующего кулачкового патрона | 1989 |
|
SU1636135A1 |


SAIWHOE УСТРОЙСТВО для механизированного зажима изделия на станках, содержащее патрон и реактивный датчик силы, выходное звено которого выполнено в виде сельсинадатчика, а также электрический привод механизма зажима, о т л и ч аю щ е е с я тем , что,-с целью обесШ . i 19 ПАШГНО- . { ,,г,,у 1Л I печения регулирования стабилизации силы зажима, а также обеспечения возможности дистанционного угравления вели1 1ной силы зажима, устройство снабжено блоком управления вели 1ной силы зажима, выполнениям а виде корпуса с круговой шкалой, соосно с которой установлен сельсин-приемник, электрически связанный с сельсин-датчиком, снабжённом стрелкойуказателем силы зажима, причем в том же корпусе с возможностью поворота установлена гильза, на которой закреплен бесконта тный концевой выключатель с экраном, закрепленным на выходном валу сельсина-приешпика, при этом на торце гильзы уста(О новлена дополнительная стрелка к шкале силы зажима.
fS
./ f6f5 9 dJ 4J 0уг.
4
Фуг.
5f
9
L
ф1/г.е.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
