Изобретение относится к грузоподъмным механизмам, а именно к подъмникам рамной конструкции, с винтоым приводом, и может быть использоано в поточно-механизированных и автоматических линиях сборки, сварки ли механической обработки.
Известен подъемник рамной констукции с винтовым приводом, содержаий основание, на котором смонтированы корпус с винтовым приводом и направляющие стойки, взаимодействующие с подъемной платформой, конечные выключатели крайних положений платформы, Cl 3.
НедостГатком известного подъемника является сравнительно )1изкая производительность его ваботы, т.е. привод от электродвигателя не позволяет получить четкой фиксации шага подъема, а также затруднена автоматическая загрузка и разгрузка платфор л.
Цель изобретения - повышение производительности его работы.
Для достижения цели в подъемнике рамной конструкции с винтовым приводом, .содержгицем основание, на котором смонтированы корпус с винтовым приводом, направляющие стойки, взаимодействующие с подъемной платформой, и конечные выключатели крайних положений платформы, привод включает в себя соединенную с приводным механизмом зубчатую рейку, установи ленный в корпусе и выполненный со ьшицевым участком вал, на котором смонтированы зубчатое колесо, взаимодействующее с гайкой винтового привода, и двухвенцовая шестерня, .одним венцом взаимодействующая с зубчатой рейкой, и муфту сцепления, размещенную на шлицевоМ участке вала и взаимодействующую с другим венцом двухвенцовой шестерни, причем в корпусе смонтированы дополнительные конечные выключатели управления приводным механизмом, взаимодействующие с зубчатой рейкой и с муфтой сцепления.
На фиг. 1 показан рамный подъемник, общий вид; на фиг. 2 - вид А на фиг. 1,
Рамный подъемник содержит основание 1, на котором в корпусе 2 размещен механизм подъема и опускания с валом 3 и валом 4. На шлицевой части вала 3 установлена муфта сцепления 5, Двухвенцовая шестерня б свободно посажена на вал 3, а шестерня 7 жестко закреплена шпонкой. На валу 4 установлена шестерня 8, закрепленная от проворота также шпонкой. Резьбовая часть вала 4 находится в соединении с ходовой гайкой 9 подъемной платфор 10, которая представляет собой лист, на котором закреплены гайка 9 и направляющие втулки 11 для
направляющих стоек 12, смонтированных на основании 1.
Включение и выключение муфты сцепления 5 осуществляется пневмоцилиндром 13 с рычажной системой 14. Привод механизма подъема и опускания осществляется от пневмоцилиндра 15 через зубчатую рейку 16 с закрепленным на ней выступом 17.
К корпусу 2 и к одной из направляюидах стоек 12 прикреплены концевые выключатели 18-22,
Устройство работает в двух режимах.
Согласно режиму накопления деталей на подъемнике деталь- укладывается на платформу 10 каким-либо механизмом.
После этого поступает сигнал с исполнительного механизма загрузки на датчик, управляющий работой пневмоцилиндра 15 . Пневмоцилиндр 15 посредством зубчатой рейки 16 осуществляет опускание платформы на соответствукяцую высоту так, чтобы следующая деталь укладывалась на той же высоте, что и предыдущая. Опускание Ьсуществляется следующим образом.
Зубчатая рейка 16 поворачивает на определенный угол двухвенцовую juecTeню б, которая находится в зацеплении с муфтой сцепления 5. Муфта сцепления 5 поворачивает вал 3, на котором неподвижно закреплена шестерня 7 Поворачиваясь, шестерня 7 вращает шестерню 8, которая вращает вал 4. Вал 4, вращаясь вокруг своей оси, перемещает ходовую гайку 9 с платформой 10 на заданную высоту вниз.
В это время упор 17 замыкает концевой выключатель 20, сигнал от КО.ТОРОГО поступает на датчик, управляющий работой пневмоцилиндра - переключателя 13, который посредством рычажной CHCTeNu 14 поднимает муфту сцепления 5 от вывода ее из зацепления с двухвенцовой шестерней 6.
.После этого от концевого выключателя 22 поступает сигнал на датчик управляющий работой пневмоцилиндра 1 который возвращает шток - рейку 16 в первоначальное положение. При этом упор 17 вызывает срабатывание концевого выключателя 21, сигнал от которого поступает на датчик, управляющий рйботой пневмоцилиндра 13. Происходит опускание муфты сцепления 5, которая входит в зацепление с двухвенцовой шестерней 6. Цикл может повторяться. Количество циклов равняется числу деталей, поступающих на платформу.
В режиме разгрузки подъекиика, когда подъемник нагружен полностью, т.е. уложена последняя деталь, подъемник-платформа, воздействуя на конечный выключатель 19, отключает датчик, управляющий работой пневмоцилиндpa 13. Поэтому муфта сцепления 5 не выводится из зацепления и пневмоцилиндр 15 не переводит зубчатую рейку 16 в исходное положение.
После того, как. появилась необходимость в деталях, из подъемника разгрузочный механизм берет верхнюю деталь и поднимает для переноса на технологический конвейер. Одновременно разгрузочный мехаиизм воздействует на датчик, управляющий работой пневмоцилиндра 15. Пневмоцилинд 15 через зубчатую рейку 16 и механизм подъема опускания осуществляет подъем платформы на высоту одной детали.
При этом упор 17 вызывает срабатывание концевого выключателя 21, сигнал от которого поступает на датчик, управляющий пневмоцилиндра 13,. который через рычажную систему 14 поднимает муфту сцепления 5, разъединяя ее с двухвенцовой шестерней 6. При этом от концевого выключателя 22 поступает сигнал на датчик, управляющий работой пневмоцилиндра 15, который передвигает зучатую рейку 16 в предьшущее положение, после чего пневмоцилиндр 13 с помощью рычажной системы 14 опускае муфту сцепления 5 до зацепления с двухвенцовой шестерней 6.
Цикл можно повторять до полной разгрузки подъемника. При полной рагрузке подъемника платформа воздействует на концевой выключатель 18, который отключает датчик, управляющий работой пневмоцилиндра 13.
Величина хода-пневмоцилиндра 15 зависит от диаметра делительной окружности венца двухвенцовой шестерни, сопрягаемого с рейкой, модуля этого зацепления, передаточного отношения шестерен 7 и 8, шага резьбы в сопряжении винт г гайка, числа заходов резьбы винта и гайки и высоты детали, уклс|дываемой в подъемник,
Ход пневмоцилиндра можно подсчитать по формуле
Н 3i- Dj
«п S. m- i
ui
где Lp - ход поршня,
5
Н. - высота подъема платформы за один цикл (высота детали)
Л 3,14;
0
D: диаметр делительной окружности венца, взаимодействующего с зубчатой рейкой,
S шаг резьбы винта,
5 число заходов резьбы. m шпередаточное отношение меж ду шестернями (позиции 7 , и 8).
Применение Яредпагаенюго изобре0тения обеспечивает точную фиксацию шага подъема, т.е. деталь подается точно на заданный уровень, а также возможность автоматической загрузки и разгрузки платформ, так как доступ к платформе сверху свободен, что повьшает производительность работы подъемника.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для нанесения клея на кромки обувных деталей из мягких материалов | 1990 |
|
SU1784202A1 |
| Гибкий производственный модуль для листовой штамповки | 1988 |
|
SU1667994A1 |
| БУРОВАЯ УСТАНОВКА | 1970 |
|
SU280386A1 |
| Плансуппортная расточная головка | 1978 |
|
SU770668A1 |
| Устройство для регулировки закрытой высоты кривошипного пресса | 1983 |
|
SU1127782A1 |
| МЕХАНИЗМ ПОДЪЕМА ГРУЗА | 2010 |
|
RU2446090C1 |
| Устройство для установки труб в трубные решетки теплообменников | 1983 |
|
SU1186452A1 |
| ШАГАЮЩАЯ ИНВАЛИДНАЯ КОЛЯСКА | 2009 |
|
RU2404900C1 |
| Шпиндельный узел станка для обработки ступенчатых упорных резьб | 1981 |
|
SU975268A1 |
| Устройство для упаковки изделий прямоугольной формы | 1982 |
|
SU1110723A1 |
ПОДЪЕМНИК РАМНОЙ КОНСТРУКЦИИ С ВИНТОВЫМ ПРИВОДОМ, содержащий основание, на котором смонтированы корпус с винтовым приводом, направляющие стойки, взаимодействующие с подъемной платформой, конечные выключатели крайних положений платформа, отличающийся тем. что, с целью повышения производитель ности его работы, -привод включает в себя соединенную с приводным механизмом зубчатую рейку, установленный в корпусе и вы1 олненный со шлицевым участком вал, на котором смонтированы зубчатое колесо, взаимодействующее с гайкой винтового привода и двуэсвенцовая шестерня, одним венцом взаимодействующая с зубчатой рейкой, и муфту сцепления, размещенную на шлицевом участке вала и взаимодействующую с другим венцом двухвенцовой шестерни, причем в корпусе смонтированы дополнительные конечные выключатели управления § приводным механизмом, взаимодействующие с зубчатой рейкой и с муфтой (Л сцепления.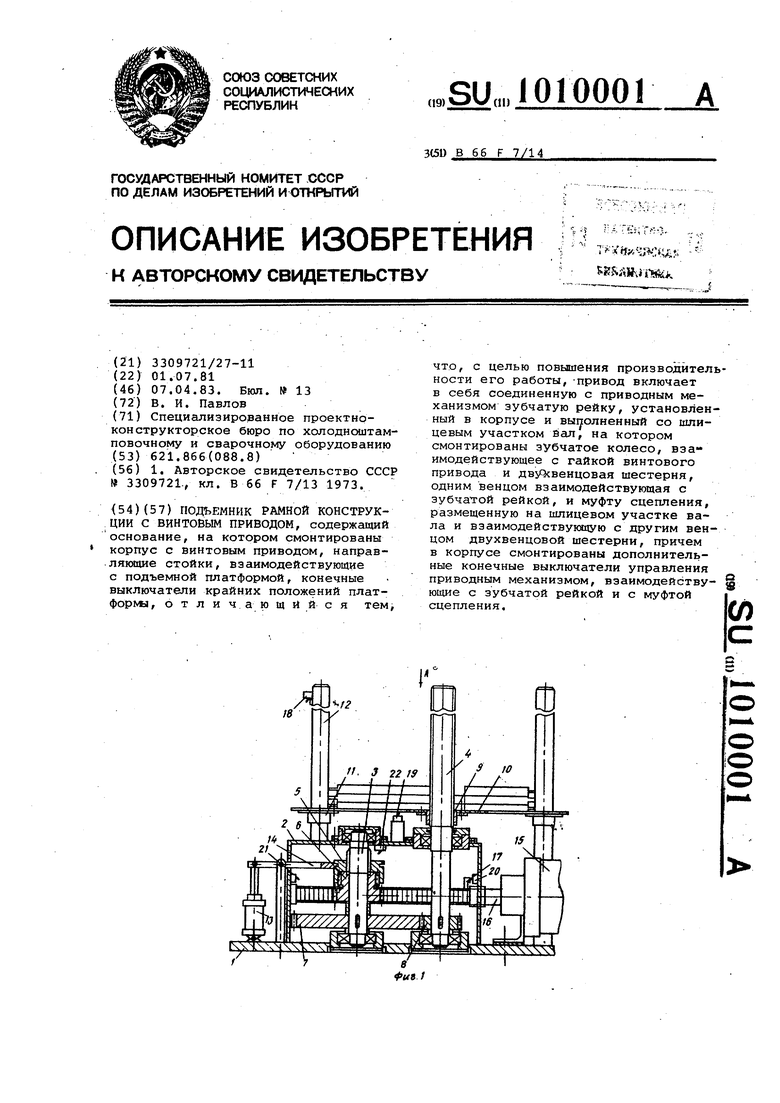
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Авторское свидетельство СССР № 3309721., кл | |||
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
| Видоизменение прибора для получения стереоскопических впечатлений от двух изображений различного масштаба | 1919 |
|
SU54A1 |
