о
СХ)
ел
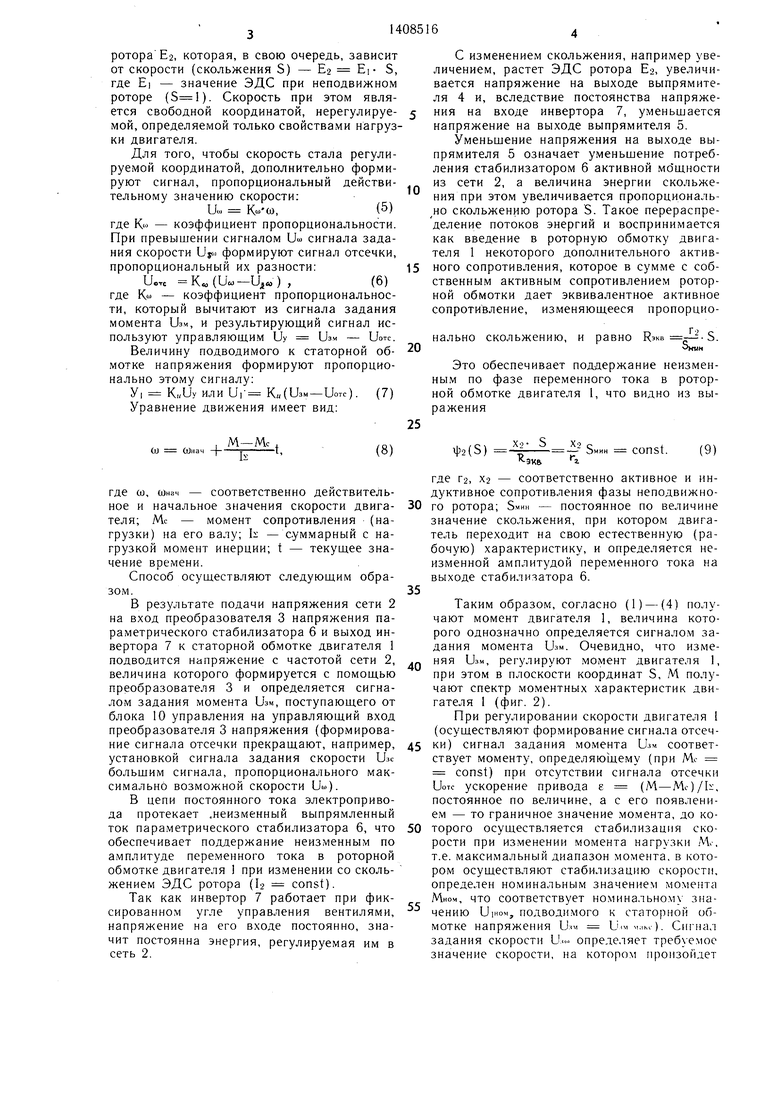
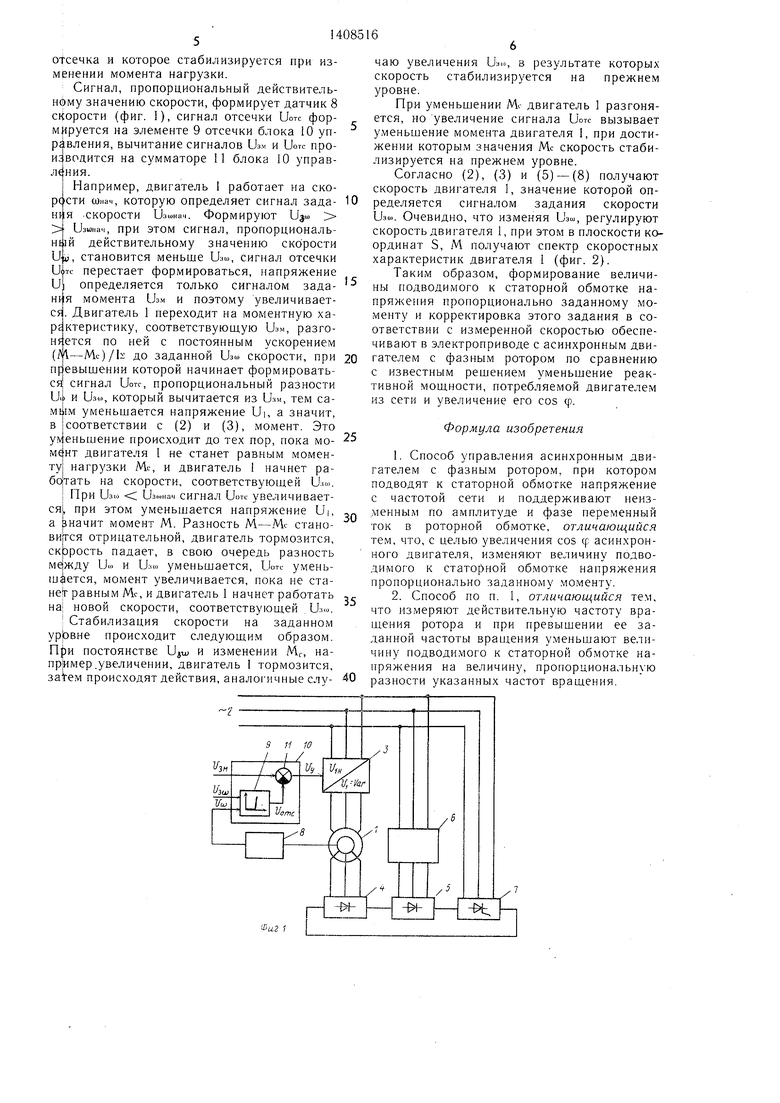
Изобретение относится к электротехнике и может быть использовано в электроприводах на базе асинхронного двигателя ; с фазным ротором, где нужно регулировать скорость и момент независимо друг от друга в широком диапазоне, плавно изменять ускорение привода, отрабатывать необ- I ходимые циклограммы работы механизмов. { Цель изобретения - увеличение cos ф I асинхронного двигателя. На фиг. 1 представлена функциональ- I ная схема электропривода, реализующего i способ управления асинхронным двигателем с фазным ротором; на фиг. 2 - механи- i ческие характеристики двигателя при пред- I лагаемом способе управления. Электропривод содержит асинхронный I двигатель 1 (фиг. 1) с фазным ротором, I обмотки статора которого подключены к се- ти 2 переменного тока через регулируемый I преобразователь 3 напряжения. Выводы об- I моток ротора подключены к входу первого i мостового выпрямителя 4, катодная груп- I па вентилей которого соединена с анод- ной группой вентилей второго мостового выпрямителя 5. Трехфазный вход второго ; мостового выпрямителя 5 подключен к сети 2 через параметрический стабилизатор 6 пере- I менного тока. Электропривод содержит также ведомый сетью инвертор 7, анодная группа вентилей которого соединена с катодной группой вентилей второго мостового : выпрямителя 5, а катодная группа вентилей - с анодной группой вентилей перво- ; го мостового выпрямителя 4. Трехфазный выход ведомого сетью инвертора 7 подсоеди- i нен к сети 2. На валу асинхронного дви- I гателя I установлен датчик 8 скорости, вы- ход которого соединен с первым входом эле- : мента 9 отсечки блока 10 управления, второй вход которого является задающим. Выход элемента 9 отсечки связан с инвер- тируюш.им входом сумматора 11 блока 10 управления, а его неинвертирующий вход служит для задания требуемого значения момента. Выход сумматора 11 подсоединен к управляющему входу регулируемого преобразователя 3 напряжения.
Момент, развиваемый асинхронным двигателем, записывается следующим образом:
М См-ф 1-12 cos 2,(1)
U
где Ф I - магнитный поток поля статора; IL - действующее значение ток-а в роторной обмотке; См - конструктивный коэффициент мащины; 2 - угол сдвига меж- сп ду ЭДС и током ротора.
Поддерживая в роторной обмотке двигателя неизменным по амплитуде Ь и фазе ij: 2 переменный ток, исключают прямую зависимость тока la от ЭДС, наводимой в роторе
Таким образом, для любого фиксированного значения момента двигателя, кроме номинального, в рассматриваемом электроприводе обеспечивается уменьшение реактивной мощности, потребляемой двигателем из сети, и увеличение его cos ф.
В рассматриваемом электроприводе асинхронный двигатель представляет собой не источник скорости, а источник момента, величина которого не зависит от скорости
магнитным потоком машины. Тем самым ис- 55 благодаря нейтрализации действия внут- ключают размагничивающее действие ЭДС ренней обратной связи двигателя по ЭДС ротора, т.е. ее влияние на магнитный поток машины, а значит, на момент, которотора, т.е. исключения зависимости тока ротора Ь, определяющего момент М, от ЭДС
10
15
20
25
30
35
40
45
сп
рый поэтому не зависит от скорости. Отсюда следует, что величины Ь и Ф i могут задаваться независимо, и асинхронный двигатель с фазным ротором управляется по двум независимым каналам: со стороны статора или ротора.
Так как в роторной обмотке поддерживают неизменным по амплитуде и фазе переменный ток, то это означает постоянство значений I и cos i|)2. Тогда выражение (1) можно записать следующим образом: М К|Ф1,(2)
где Ki CMl2COSil)2 - постоянный коэффициент.
Магнитный поток поля статора Ф i при постоянстве частоты подводимого к статор- ной обмотке напряжения определяется главным образом величиной этого напряжения Ui:
Ui CfФ, или Ф, CfU,,(3)
где С/ - постоянный коэффициент.
Поскольк; номинальная точка выбирается на середине колена кривой намагничивания двигателя, а напряжение, подводимое к статорной обмотке, не превыщает номинального в предлагаемом способе, выражение (3), согласно известным методам линеаризации кривых, справедливо.
В рассматриваемом электроприводе величину подводимого к статорной обмотке напряжения Ui формируют пропорционально управляющему сигналу Uy, в качестве которого используют сигнал задания момента изм, т.е.:
U, K«Vy или у, К«изм,(4)
где Ки - постоянный коэффициент.
Реализация (2) - (4) позволяет регулировать момент двигателя.
В рассматриваемом электроприводе напряжение, подводимое к статорной обмотке Ui, уменьщают от его номинального значения (Ь и Ч а - постоянны), при этом процентное содержание реактивной составляющей тока, потребляемого двигателем из сети, уменьщается по сравнению с активной за счет снижения расходования реактивной мощности на намагничивание мащины, что означает уменьшение потребления реактивной мощности двигателем из сети, увеличение его cos ф.
Таким образом, для любого фиксированного значения момента двигателя, кроме номинального, в рассматриваемом электроприводе обеспечивается уменьшение реактивной мощности, потребляемой двигателем из сети, и увеличение его cos ф.
В рассматриваемом электроприводе асинхронный двигатель представляет собой не источник скорости, а источник момента, величина которого не зависит от скорости
55 благодаря нейтрализации действия внут- ренней обратной связи двигателя по ЭДС благодаря нейтрализации действия внут- ренней обратной связи двигателя по ЭДС
ротора, т.е. исключения зависимости тока ротора Ь, определяющего момент М, от ЭДС
ротора Е2, которая, в свою очередь, зависит от скорости (скольжения S) - 2 EI- S, где EI - значение ЭДС при неподвижном роторе (S). Скорость при этом является свободной координатой, нерегулируемой, определяемой только свойствами нагрузки двигателя.
Для того, чтобы скорость стала регулируемой координатой, дополнительно формируют сигнал, пропорциональный действительному значению скорости;
Uo, ,(5)
где KM - коэффициент пропорциональности. При превышении сигналом Уш сигнала задания скорости Uj.. формируют сигнал отсечки, пропорциональный их разности:
U..C K«(Uc.-Ц„) ,(6)
где Кш - коэффициент пропорциональности, который вычитают из сигнала задания момента Уэм, и результирующий сигнал используют управляющим Оу US.M - UOTC.
Величину подводимого к статорной обмотке напряжения формируют пропорционально этому сигналу:
У, или Ur клизм-UOTC). (7) Уравнение движения имеет вид:
0
5
0
С изменением скольжения, например увеличением, растет ЭДС ротора На, увеличивается напряжение на выходе выпрямителя 4 и, вследствие постоянства напряжения на входе инвертора 7, уменьшается напряжение на выходе выпрямителя 5.
Уменьщение напряжения на выходе выпрямителя 5 означает уменьшение потребления стабилизатором б активной мо щности из сети 2, а величина энергии скольжения при этом увеличивается пропорциональ- но скольжению ротора S. Такое перераспре- деление потоков энергий и воспринимается как введение в роторную обмотку двигателя 1 некоторого дополнительного активного сопротивления, которое в сумме с собственным активным сопротивлением роторной обмотки дает эквивалентное активное сопротивление, изменяющееся пропорционально скольжению, и равно .
XVH
Это обеспечивает поддержание неизменным по фазе переменного тока в роторной обмотке двигателя 1, что видно из выражения
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления асинхронным двигателем с фазным ротором | 1989 |
|
SU1723652A1 |
| Способ управления асинхронным двигателем с фазным ротором | 1986 |
|
SU1381679A1 |
| Электропривод переменного тока | 1985 |
|
SU1272463A1 |
| Электропривод | 1985 |
|
SU1309244A1 |
| Электропривод | 1986 |
|
SU1372580A1 |
| Электропривод для механизма с вентиляторным моментом нагрузки | 1987 |
|
SU1494190A1 |
| Электропривод переменного тока | 1986 |
|
SU1379933A2 |
| Электропривод переменного тока | 1987 |
|
SU1501242A2 |
| Электропривод | 1988 |
|
SU1684902A1 |
| Регулируемый электропривод | 1988 |
|
SU1629956A1 |

Изобретение относится к электротехнике. Целью изобретения является увеличение cos ф асинхронного двигателя. Указанная цель достигается тем, что в способе управления асинхронным двигателем с фазным ротором изменяют величину напряжения, подводимого к статорной обмотке асинхронного двигателя, посредством преобразователя напряжения пропорционально заданному моменту, а именно уменьшают от номинального значения. В результате уменьшают потребление реактивной мощности. 1 з.п. ф-лы, 2 ил. (Л
, М-Мс ,
О) (Онач -|Г-;1,
где со, шнач - соответственно действительное и начальное значения скорости двигателя; Мс - момент сопротивления (нагрузки) на его валу; h - суммарный с нагрузкой момент инерции; t - текущее значение времени.
Способ осуществляют следующим образом.
В результате подачи напряжения сети 2 на вход преобразователя 3 напряжения параметрического стабилизатора 6 и выход инвертора 7 к статорной обмотке двигателя 1 подводится напряжение с частотой сети 2, величина которого формируется с помощью преобразователя 3 и определяется сигналом задания момента USM, поступающего от блока 10 управления на управляющий вход преобразователя 3 напряжения (формирование сигнала отсечки прекращают, например, установкой сигнала задания скорости Use большим сигнала, пропорционального максимально возможной скорости Uio).
В цепи постоянного тока электропривода протекает .неизменный выпрямленный ток параметрического стабилизатора 6, что обеспечивает поддержание неизменным по амплитуде переменного тока в роторной обмотке двигателя 1 при изменении со скольжением ЭДС ротора (Ь const).
Так как инвертор 7 работает при фиксированном угле управления вентилями, напряжение на его входе постоянно, значит постоянна энергия, регулируемая им в сеть 2.
2(5)
XL -ЭК5
SХ с1
- -- Ьмин const.
f.
(9)
0
5
0
5
0
5
где Г2, Х2 - соответственно активное и индуктивное сопротивления фазы неподвижного ротора; Змии - постоянное по величине значение скольжения, при котором двигатель переходит на свою естественную (рабочую) характеристику, и определяется неизменной амплитудой переменного тока на выходе стабилизатора 6.
Таким образом, согласно (1)-(4) получают момент двигателя 1, величина которого однозначно определяется сигналом задания момента Уэм. Очевидно, что изменяя UsM, регулируют момент двигателя 1, при этом в плоскости координат S, М получают спектр моментных характеристик двигателя 1 (фиг. 2).
При регулировании скорости двигателя (осуществляют формирование сигнала отсечки) сигнал задания момента Узм соответствует моменту, определяю1дему (при Мс const) при отсутствии сигнала отсечки UOTC ускорение привода е (М-Mc)/h, постоянное по величине, а с его появлением - то граничное значение момента, до которого осуществляется стабилизация скорости при изменении момента нагрузки М-, т.е. максимальный диапазон момента, в котором осуществляют стабилизацию скорости, определен номинальным значением момента Миом, что соответствует номинальному значению UiHOM, подводимого к статорной обмотке напряжения .KC). Сигнал задания скорости U.... определяет требуемое значение скорости, на котором произойдет
otce4Ka и которое стабилизируется при изменении момента нагрузки.
Сигнал, пропорциональный действительному значению скорости, формирует датчик 8 скорости (фиг. I), сигнал отсечки UOTC формируется на элементе 9 отсечки блока 10 управления, вычитание сигналов USM и UOTC производится на сумматоре 11 блока 10 управления.
Например, двигатель 1 работает на скорости шнач, которую определяет сигнал зада-
ИНН .скорости изшнач. Формируют Uju)
изшнач, при этом сигнал, пропорциональный действительному значению ско рости U-xj, становится меньше Uaw, сигнал отсечки UIITC перестает формироваться, напряжение и определяется только сигналом зада- т.я момента USM и поэтому увеличивается
Р
няется по ней с постоянным ускорением (М-Мс)/Ь до заданной Us) скорости, при превышении которой начинает формироваться
и.
. Двигатель 1 переходит на моментную ха- ктеристику, соответствующую Узм, разго
сигнал UOTC, пропорциональный разности и Usw, который вычитается из изм, тем са- мфм уменьшается напряжение Ui, а значит,
соответствии с (2) и (3), момент. Это у1У|еньшение происходит до тех пор, пока момент двигателя I не станет равным моменту нагрузки Мс, и двигатель 1 начнет работать на скорости, соответствующей Озш.
I При U3W из(инач сигнал UOTC увеличивается, при этом уменьшается напряжение Ui, а значит момент М. Разность М-Мс стано- виггся отрицательной, двигатель тормозится, скорость падает, в свою очередь разность и. и Uaoi уменьшается, UOTC уменьшается, момент увеличивается, пока не станет равным Мс, и двигатель 1 начнет работать на новой скорости, соответствуюцд.ей Us.,..
: Стабилизация скорости на заданном ур|овне происходит следуюши.м образом. П{)и постоянстве Ujtu и изменении М, на- пр|имер,увеличении, двигатель 1 тормозится, 3ate.M происходят действия, аналогичные слу-
Фаг 1
чаю увеличения , в результате которых скорость стабилизируется на прежнем уровне.
При уменьшении Мс двигатель 1 разгоняется, но увеличение сигнала UW вызывает уменьшение момента двигателя I, при достижении которым значения Мс скорость стабилизируется на прежнем уровне.
Согласно (2), (3) и (5) -(8) получают скорость двигателя 1, значение которой определяется сигналом задания скорости иза,. Очевидно, что изменяя Ь зш, регулируют скорость двигателя 1, при этом в плоскости координат S, М получают спектр скоростных характеристик двигателя i (фиг. 2).
Таким образом, формирование величины подводимого к статорной обмотке напряжения пропорционально заданному моменту и корректировка этого задания в соответствии с измеренной скоростью обеспечивают в электроприводе с асинхронным двигателем с фазным ротором по сравнению с известньЕМ решением уменьшение реактивной мощности, потребляемой двигателем из сети и увеличение его cos ф.
Формула изобретения
| Электропривод переменного тока | 1983 |
|
SU1100705A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Электропривод переменного тока | 1985 |
|
SU1272463A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
