1
: Изобретение относится к робото- техническим средствам подачи деталей в зону обработки и касается устройств управления этими средствами.
Цель изобретения - повышение надеж- ности захвата изделий путем исключения возникновения переходного состояния в силовой-;воздушной магистрали вакуумного захвата при смгене деист- мл ВИЯ сжатого воздуха действием вакуума.
На чертеже представлена схема.предлагаемо го устройства.
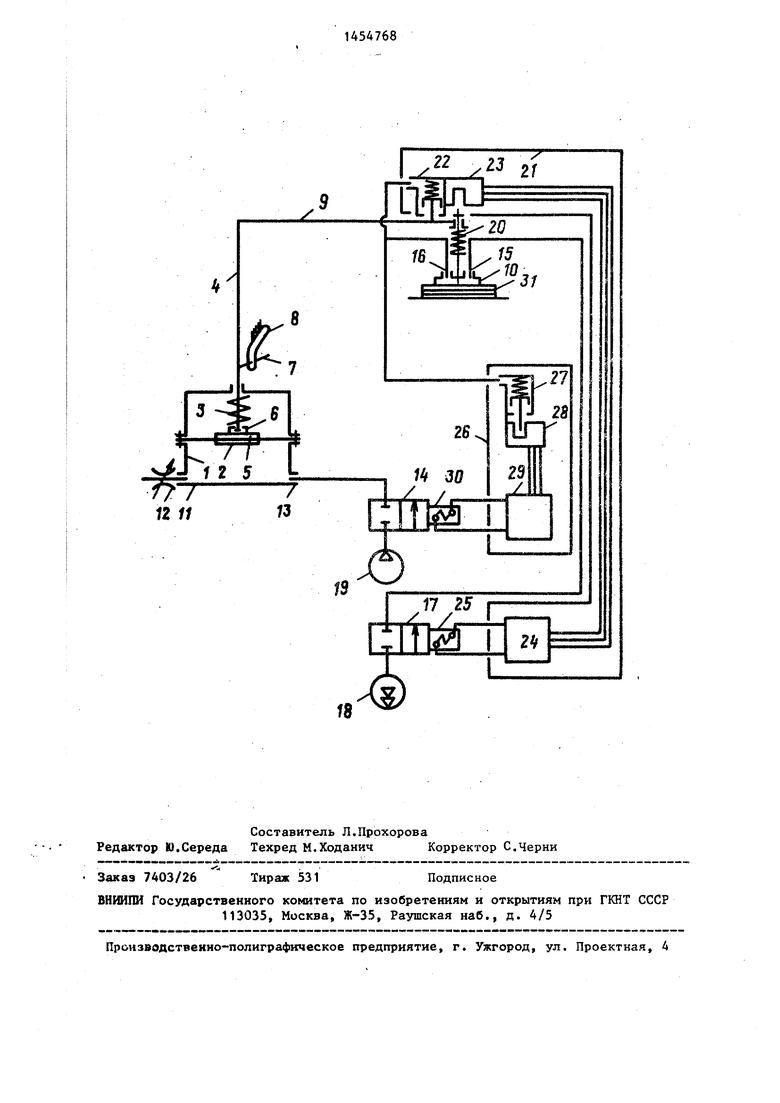
Устройство для управления механиз-je MOM подачи изделий в зону обработки содержит привод в виде мембранной камеры 1, в которой установлена мембра-гна с жестким центром 2 и возвратная пружина 3. Шток 4 кинематически соединен с жестким центром 2 посредством вращательной пары 5 и6, которая обеспечивает возможность поворота штока 4 относительно жесткого центра 2, однако исключает их смещение один относительно другого в вертикальной |плоскости. На штоке 4 жестко укреплен палец 7, размещенный в пазу 8, а также кронштейн 9 манипулятора с установленным на нем вакуумным захватом 10.. Нагнетательная полость мембранной камеры 1 имеет выхлопной канал 11, снабженный дросселем 12, и входной (нагнетательный) канал 13, пневматически соединенный с выходом
4;а СД 4 -к1
С 00
блока управления приводом механизма, выполненного в виде пневмораспредели- теля 14 с электромагнитньт управлением. Рабочая камера вакуумного захвата 10 имеет силовой пневмоканал 15 и управляющий канал 16 датчика давле- ния в камере захвата. Силовой канал 15 захвата пневматически соединен с вьпсодом пневмораспределителя 17, силовой вход которого подключен к источнику 18 вакуума. Силовой выход пневмораспределителя 14 пневматически соединен снагнетательным каналом 13 камеры 1, а вход - с источником 19 сжатого воздуха. Управляющий вход пневмораспределителя 17 электромагнитный. Захват 10 с помощью подпружиненного стержня 20 подвижно установлен в рычаге 9 манипулятора. Узел 21 управления пневмораспределителем 17 установлен на рычаге 9 за счет жесткого крепления плунжера пневмо- цилиндра 22, на цилиндре которого жестко закреплен датчик 23 касания. Управляющий выход датчика 23 через усилитель 24 подключен к управлякнцему входу - электромагниту 25 пневмораспределителя 17. Верхний конец стержня 20 взаимодействует с сигнализирую- 1ЦИН берьероМ датчика 23 касания. Вакуумный пневмоцилиндр 22, выполняющий функции механизма оперативной памяти пневматически соединен с каналом 16 вакуумного захвата. Преобразователь 26 сигнала датчика давления состоит из вакуумного пневмоцилиндра 27 и жестко прикрепленного к его цилиндру бесконтактного включателя 28, выполненного на базе взаимодействующих фотометрически друг с другом фоторезистора «М:-2К ТУЗ-3. 1694-79 и излучающего светодиода АП107А ФЫ0.336, 015ТУ. Выступающий из цилиндра конец плунжера пневмоцилиндра 27 взаимодействует с сигнализирующим барьером датчика 28. Пневмоцилиндр 27 соедине пневматически с каналом 16 вакуумног захвата, а управляющий выход датчика 28 через усилитель 29 подключен к управляющему входу-электромагниту 30 пневмораспределителя 14. На схеме обозначена также пачка 31 кроя.
Устройство работает следующим образом.
При снятии оператором детали с захвата 10 непосредственным отделением за ее край или поднятием подвижной части пневмоцилиндра 22 в рабочей камере давлен1 е становится равным близИсходное положение плунжеров пнев- 55 ко атмосферному, а в полостях пневмо- мораспределителей 14 и 17 показано цилиндров 22 и 27 - равным атмосфер- f на схеме. При этом с выходом сжатого ному. В результате этого сигнализирую- воздуха из мембранной камеры 1 через щие барьеры датчика 23 и включателя
5
0
дроссель 12 шток 4, опускаясь вниз под действием пружины 3, прижимает захват 10 к верхмей детали стопы 31. После останова захвата 10 шток 4 продолжает опускаться вниз, в результате чего подвижная часть захвата открывает сигнализирующий барьер датчика 23, который пошлет управляющий электрический сигнал через усилитель 24 на управляющий вход пневмораспределителя 1 7. Плунжер пневмораспределителя 17 откроет канал подачи вакуума в силовой канал 15 захвата 10.
Поскольку захват 10 будет прижат к стопе 31, в его рабочей камере создастся разрежение. Такое же разрежение создается и в полостях пневмо- цилиндров 22 и 27.
В реЗ ультате разрежения подвижная часть пневмоцилиндра 27 откроет сигнализирующий барьер включателя 28, который пошлет управляющий сигнал че- 5 рез усилитель 29 на управляющий вход пневмораспределителя 14. Плунжер пневмораспределителя 14 откроет канал подачи сжатого воздуха в камеру 1 через канал 13.
Одновременно со срабатыванием пневмоцилиндра 27 срабатывает пневмоцилиндр 22, который сместит датчик 23 касания в сторону захвата 10 на величину перемещения захвата относительно кронштейна 9 манипулятора.
Сжатый воздух, воздействуя в камере 1 на мембрану, перемещает ее жесткий центр 2 со штоком 4 и кронштейном 9 манипулятора, несущего на себе захват 10,. датчик 23 и пневмоцилиндр 22, вверх, а затем с помощью пальца 7 и паза 8 в сторону. При движении кронштейна 9 вверх захват 10 сначала остается неподвижным относительно стопы 3 1 , а затем отрывается от нее с удерживаемой им деталью. При этом сигнализирующий барьер датчика 23 остается открытым, в связи с чем остается открытым и канал подачи вакуума в пневмораспределителе 17.
При снятии оператором детали с захвата 10 непосредственным отделением за ее край или поднятием подвижной части пневмоцилиндра 22 в рабочей камере давлен1 е становится равным близ0
5
0
5
0
5 ко атмосферному, а в полостях пневмо- цилиндров 22 и 27 - равным атмосфер- ному. В результате этого сигнализирую- щие барьеры датчика 23 и включателя
28 перекроются соответственно за сче возвратного движения подвижной части пневмоцилинд1-а 27 под действием пруЖИЦЫ и за счет возвратного движения датчика 23 вместе с подвижной частью пневмоцилиндра 1L под действием пружина, а плунжеры пневмоперекагючате- лей 14 и 17 перекроют каналы соответственно подачи сжатого воздуха и подачи вакуума.
При прекращении доступа сжатого воздуха в камеру 1 через канал 13 и истечении имеющегося через канал 11 и дроссель 12, жесткий центр 2 со штоком 4 и кронштейном 9 под действием пружины 3 и с помощью пальца 7 и паза 8 опустится вниз и переместит захват 10 из зоны выгрузки в сторону стопы 31 и опустит на заготовку. В дальнейшем цикл работы повторяется. Устройство позволяет осуществлять надежное захватывание, удержание и перенос в зону обработки как изделий, обеспечивающих в силу своих механических свойств герметичное соединение с рабочей камерой вакуумного захвата, изготовленного из неэластичного материала, так и изделий, форма и механические свойства примыкающих к рабочей камере вакуумного захвата поверхностей которых способствуют образованию значительных утечек вакуума в зоне примыкания захвата к изделию. Конструкция вакуумного захвата позволяет захватывать и удерживать детали с очень малыми размерами площади примыкания к его рабочей камере - до десятых долей квадратного сантиметра, и выбор размера поперечного сечения его управляющего пневмоканала не влияет на надежность работы устройства. Ф, о р м у л а изобретения
1. Устройство для управления механизмом подачи изделий в зону обработ0
15
0
5
0
5
0
ки, соде; жащее пневмопривод, на штоке которого жестко укреплен палец, размещенный в пазу, а также кронштейн манипулятора, с установленным на нем вакуумным захватом, блок управления приводом механизма, пневмораспредели- тель, включенный между источником вакуума и вакуумным захватом, датчик давления в рабочей камере вакуумного захвата, отличающееся тем, что, с целью повьш1ения надежности захвата изделий путем исключения возникновения переходного состояния в силовой воздушной магистрали вакуумного захвата при смене действия сжатого воздуха действием вакуума, оно дополнительно содержит средство управления пневмораспределителем вакуумного захвата, выполненное в виде первого пневмоцилиндра с жестко за- крепленньш датчиком касания и первого усилителя, преобразователь сигнала датчика давления, выполненный в виде второго пневмо1щпиндра с жестко закрепленным фотодатчиком и вторым усилителем, причем управляющий выход датчика касания через первый усилитель подключен к управляющему входу - электромагниту пневмораспре- делителя, вакуумного захвата, первый пневмоцилиндр пневматически соединен .с управляющим каналом датчика : давления и вторым пневмоцилиндром, а управляющий выход фотодатчика через второй усилитель подключен к управляющему входу - электромагниту блока управления приводом механизма .
j 2. Устройство по п. 1, отличающееся тем, что пневмока- нал датчика давления и силовой пнев- моканап вакуумного захвата расположены в рабочей камере.k
f8
| название | год | авторы | номер документа |
|---|---|---|---|
| Прореживатель сахарной свеклы | 1987 |
|
SU1428224A1 |
| Устройство для отделения плоских воздухопроницаемых деталей от пачки | 1988 |
|
SU1509322A1 |
| Устройство для дробления негабарита | 1988 |
|
SU1682555A1 |
| Привод вертикального перемещения стола пакетирующего устройства | 1985 |
|
SU1375539A1 |
| Пневматический зарядчик для непатронированных взрывчатых веществ | 1989 |
|
SU1739177A1 |
| Система управления уравновешивающим подъемником | 1986 |
|
SU1331805A1 |
| Многопозиционный пресс для штамповки деталей | 1988 |
|
SU1542670A1 |
| Система управления уравновешивающим пневматическим подъемником | 1988 |
|
SU1532523A2 |
| Устройство для управления уравновешивающим подъемником | 1988 |
|
SU1569317A1 |
| Кран-манипулятор | 1984 |
|
SU1278293A1 |
Изобретение относится к робото- техническим средстваьз подачи деталей в зону обработки и касается устройств управления этими средствами, и позволяет повысить надежность и быстродействие срабатывания датчика давления путем управления пневмораспределите- лем. После останова захвата на детали шток продолжает опускаться, а по движная часть захвата откроет сигнализирующий барьер датчика касания, который пошлет управляющий -электри- . ческий сигнал на управляющий вход пневмораспределителя вакуума через первый усилитель. Плуьсжер пневмораспределителя вакуума откроет канал подачи вакуума в силовой канал захвата. Подвижная часть пиевмо- цилиндра откроет сигнализирующий барьер фотодатчика, которьй пошлет управляющий сигнал через второй усилитель на управляющий вход пневмораспределителя блока управления приводом механизма, плунжер которого отг: кроет канал подачи сжатого воздуха, в мембранную камеру через нагнетательный канал. Деталь захвачена. 1 3. п. ф-лы, 1 ил.. С/)
Составитель Л.Прохорова Редактор Ю.Середа Техред М.Ходанич Корректор С.Черни
Заказ 7403/26
Тираж 531
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Подписное
| Устройство для управления механизмом подачи изделий в зону обработки | 1984 |
|
SU1202992A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
