10
20
25
Изобретение относится к автоматизации производства радиоэлектронной аппаратуры, в частности производства печатных плат, и может быть применено в радиопромышленности, приборостроении и полиграфической промышленности.
Цель изобретения - повышение надежности работы кантователя и расширение его технологических возможностей.
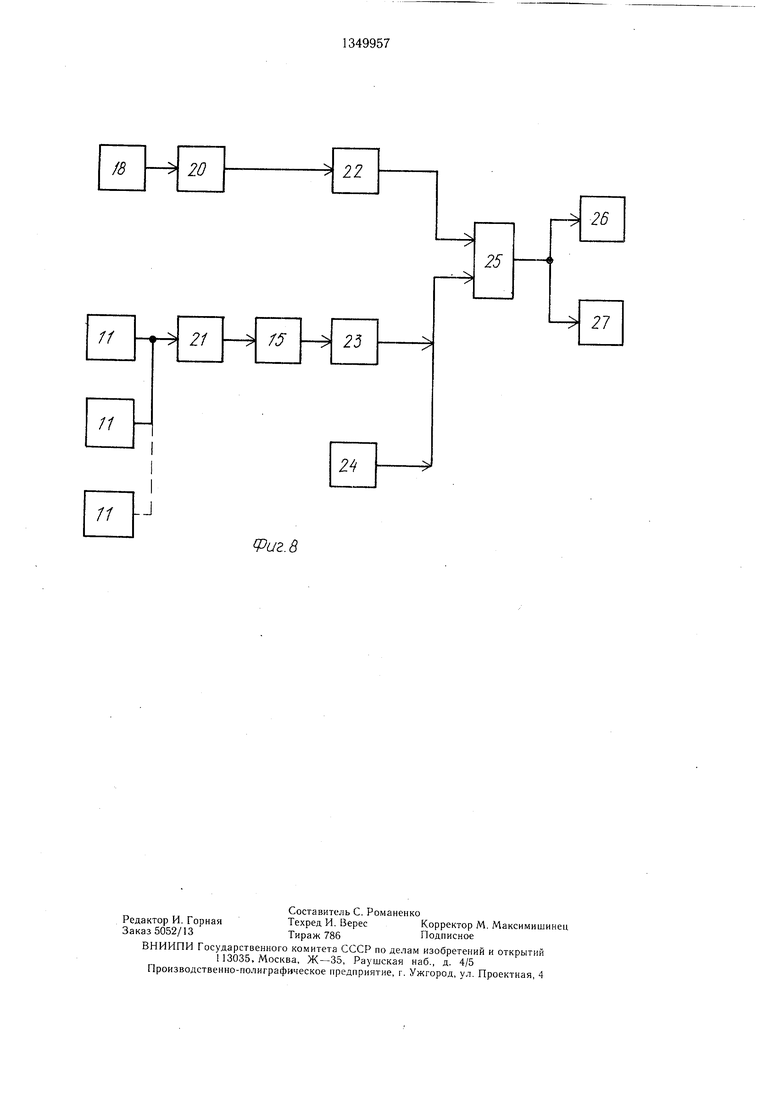
На фиг. 1 изображен предлагаемый кантователь, общий вид; на фиг. 2 - то же, вид сверху; на фиг. 3 - сечение А-А на фиг. 1; на фиг. 4 - сечение Б-Б на фиг. 1; на фиг. 5 -г- сечение В-В на фиг. 1; на фиг. 6 - вид Г на фиг. 3; на фиг. 7 - сечение Д-Д на фиг. 6; на 5 фиг. 8 - схема блока управления.
Кантователь состоит из устройства 1 поворота, на котором закреплены привод 2 поворота и блок 3 управления.
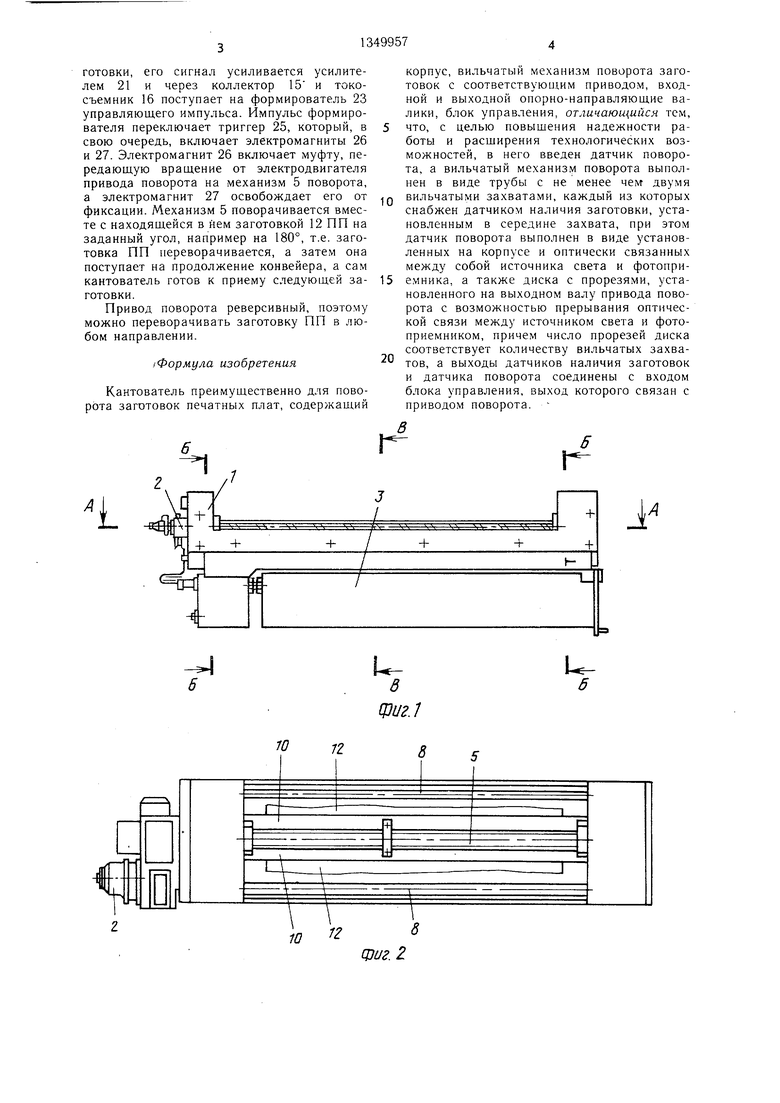
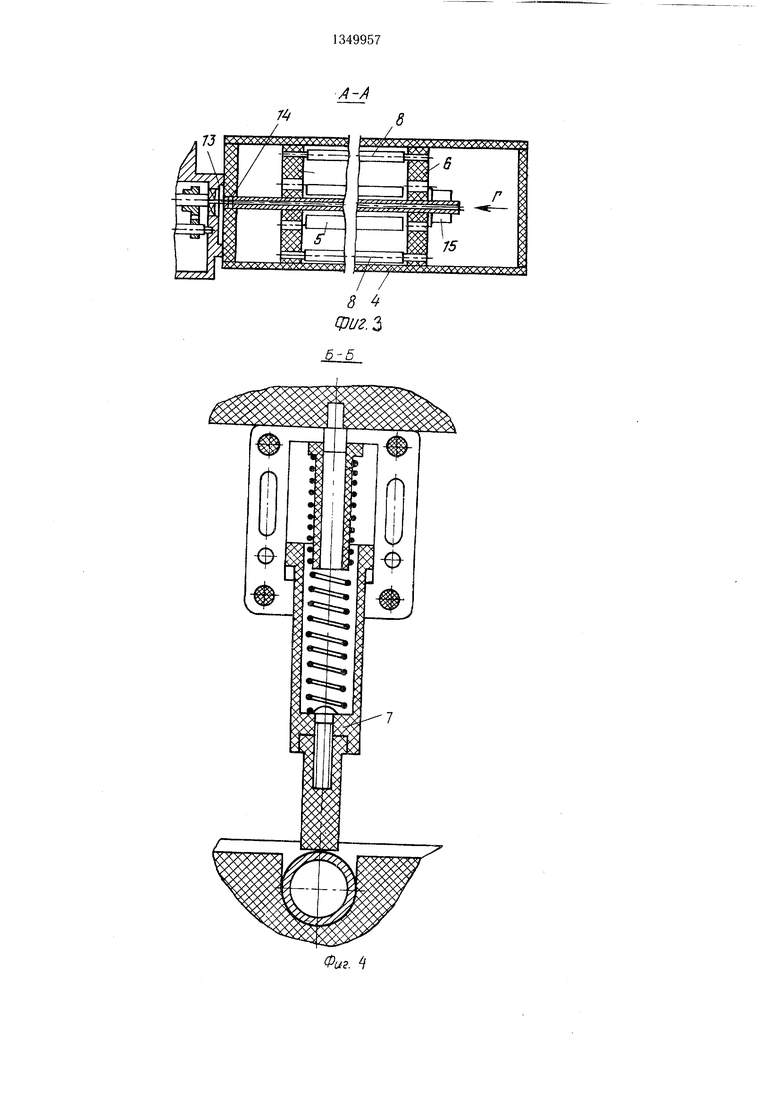
Устройство поворота состоит из корпуса 4, в котором размещается вильчатый механизм 5 поворота, вращающийся в опорах 6, закрепленных в корпусе 4. В вертикальной плоскости механизм поворота имеет пружинные прижимы 7, также закрепленные на корпусе 4. В этих же опорах уста- новлень опорно-направляющие валики 8. Вильчатый механизм 5 поворота состоит из трубы 9, на которой закреплены вильчатые захваты 10, равномерно расположенные по диаметру трубы. Количество вильчатых захватов зависит от скорости пере- .п мещения заготовок печатных плат (ПП) по конвейеру и должно быть достаточным, чтобы обеспечить согласование скорости перемещения по конвейеру и скорости поворота вокруг горизонтальной оси. Размеры вильчатых захватов 10 обеспечивают гаран- -, тированное попадание в них с конвейера заготовок и переворачивание этих заготовок без дополнительной фиксации.
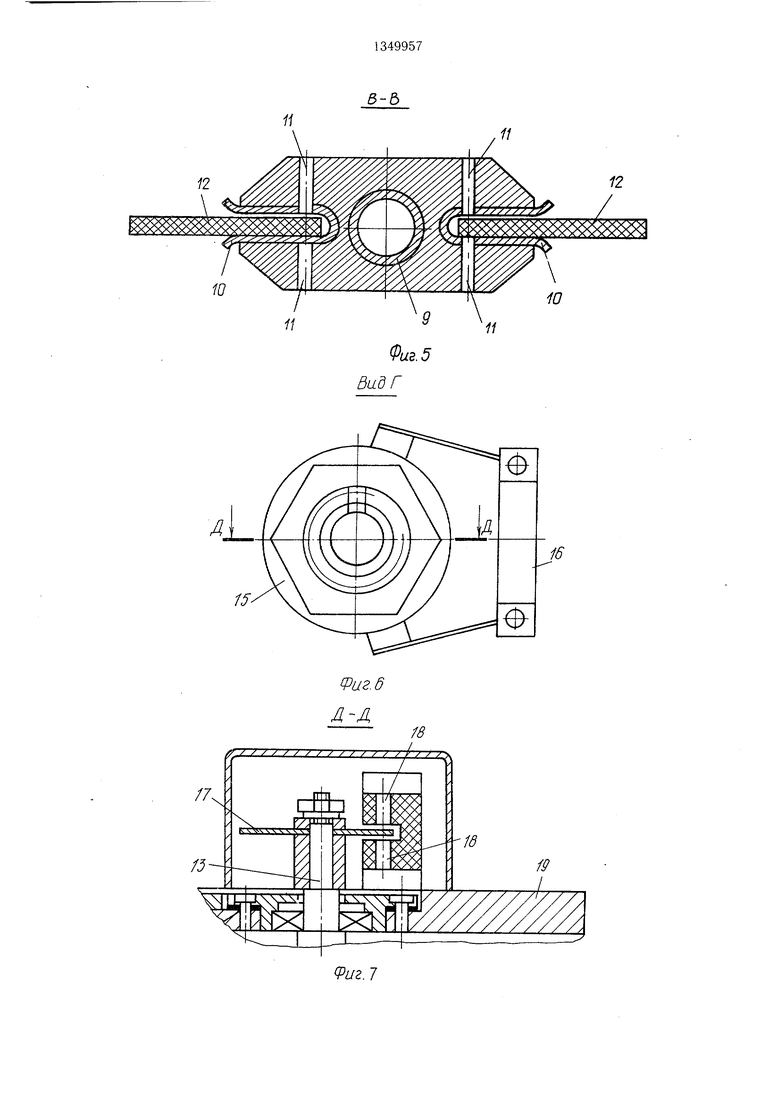
В середине вильчатых захватов 10 у дна расположены датчики 11 наличия загото- 40 вок, представляющие из себя, например, со- осно расположенные светодиоды и фотодиоды, которые сигнализируют о входе заготовки 12 ПП в вильчатый захват 10. Датчики И через блок 3 управления связаны с приводом 2 поворота. Механизм 5 поворота соединен с выходным валом 3 привода 2 поворота разъемным соединением 14. На механизме 5 поворота закреплен коллектор 15, работающий в паре с токосъемником 16. В трубе 9 имеется отверстие, через которое выводные концы датчиков 11 наличия заготовок ПП проведены внутрь трубы и оттуда на коллектор 15. От токосъемника 16 сигналы поступают в блок 3 управления. Разъемное соединение 14 меха50
Привод 2 поворота предназначен для поворота механизма 5 с находящейся в нем заготовкой 12 ПП на 180° в любую сторону, а при необходимости и на .любой другой заданный угол.
Запуск привода 2 осуществляется через блок 3 управления при срабатывании датчиков 11 наличия заготовки. Команду на останов вильчатого механизма 5 поворота дает датчик поворота, который выполнен в виде диска 17 с прорезями, установленного на выходно.м валу 13 привода поворота, и оптически связанных светодиода и фотодиода 18, стационарно закрепленных на корпусе 19 привода поворота 2. Датчик поворота срабатывает от светового потока, проходящего через прорези на диске 17. Количество прорезей на последнем должно быть равным количеству вильчатых захватов 10.
В состав блока 3 управления входят два усилителя 20 и 21, два формирователя 22 и 23 управляющих импульсов, блок 24 установки схемы в исходное положение и триггер 25.
Усилители 20 и 21 служат для усиления слабых токов датчиков до необходимых логических уровней. Формирователи 22 и 23 управляющи Х импульсов служат для формирования одиночных импульсов из потенциальных сигналов датчиков 11 наличия заготовки и датчика поворота. Блок 3 управления связан с приводом 2 поворота, например с входящи.ми в привод эле.ктро.маг- нитами 26 и 27. Электромагнит 26 управляет муфтой, передающей (или не передающей) вращение от выходного вала двига теля привода поворота к выходно.му валу 13 привода поверота, т.е. к вильчатому ме- ханиз.му 5 поворота.
Электромагнит 27 в обесточенном состоянии фиксирует выход 1ой вал 13 привода поворота, т.е. вильчатый механизм 5 поворота.
Кантователь работает следующим образом.
При включении питания с помощью блока 24 триггер 25 устанавливается в состояние, при которо.м он вк;1ючает электромагниты 26 и 27, а .механизм 5 поворота начинает вращагься и вращается до тех пор, пока прорезь диска 17 .че открывает свето- диод и фотодиод 18. Сигнал от этого датчика поворота через усилитель 20 поступает на формирователь 22 управляющего импульса, где формируется импульс, переключающий триггер 25, который, в свою очередь, выключает электромагниты 26 и 27. Электромагнит 26 выключает муфту, передающую вращение от.электродвигателя привода поворота к механизму 5, который останавливается, а электромагнит 27 фиксирует
низма 5 поворота с выходным валом 13 при-сг это положение,
вода поворота и пружинные прижимы 7 вКантователь готов к приему заготовки,
вертикальном направлении дают возмож-При поступление заготовки 12 ПП с конность быстрого монтажа и при необходи-вейера в вильчатый захват 10 механизма
мости демонтажа механизма 5 поворота.поворота затемняется датчик 11 наличия за0
0
5
5
п
0
0
Привод 2 поворота предназначен для поворота механизма 5 с находящейся в нем заготовкой 12 ПП на 180° в любую сторону, а при необходимости и на .любой другой заданный угол.
Запуск привода 2 осуществляется через блок 3 управления при срабатывании датчиков 11 наличия заготовки. Команду на останов вильчатого механизма 5 поворота дает датчик поворота, который выполнен в виде диска 17 с прорезями, установленного на выходно.м валу 13 привода поворота, и оптически связанных светодиода и фотодиода 18, стационарно закрепленных на корпусе 19 привода поворота 2. Датчик поворота срабатывает от светового потока, проходящего через прорези на диске 17. Количество прорезей на последнем должно быть равным количеству вильчатых захватов 10.
В состав блока 3 управления входят два усилителя 20 и 21, два формирователя 22 и 23 управляющих импульсов, блок 24 установки схемы в исходное положение и триггер 25.
Усилители 20 и 21 служат для усиления слабых токов датчиков до необходимых логических уровней. Формирователи 22 и 23 управляющи Х импульсов служат для формирования одиночных импульсов из потенциальных сигналов датчиков 11 наличия заготовки и датчика поворота. Блок 3 управления связан с приводом 2 поворота, например с входящи.ми в привод эле.ктро.маг- нитами 26 и 27. Электромагнит 26 управляет муфтой, передающей (или не передающей) вращение от выходного вала двига теля привода поворота к выходно.му валу 13 привода поверота, т.е. к вильчатому ме- ханиз.му 5 поворота.
Электромагнит 27 в обесточенном состоянии фиксирует выход 1ой вал 13 привода поворота, т.е. вильчатый механизм 5 поворота.
Кантователь работает следующим образом.
При включении питания с помощью блока 24 триггер 25 устанавливается в состояние, при которо.м он вк;1ючает электромагниты 26 и 27, а .механизм 5 поворота начинает вращагься и вращается до тех пор, пока прорезь диска 17 .че открывает свето- диод и фотодиод 18. Сигнал от этого датчика поворота через усилитель 20 поступает на формирователь 22 управляющего импульса, где формируется импульс, переключающий триггер 25, который, в свою очередь, выключает электромагниты 26 и 27. Электромагнит 26 выключает муфту, передающую вращение от.электродвигателя привода поворота к механизму 5, который останавливается, а электромагнит 27 фиксирует
г это положение,
готовки, его сигнал усиливается усилителем 21 и через коллектор 15 и токосъемник 16 поступает на формирователь 23 управляющего импульса. Импульс формирователя переключает триггер 25, который, в свою очередь, включает электромагниты 26 и 27. Электромагнит 26 включает муфту, передающую вращение от электродвигателя привода поворота на механизм 5 поворота, а электромагнит 27 освобождает его от фиксации. Механизм 5 поворачивается вместе с находящейся в нем заготовкой 12 ПП на заданный угол, например на 180°, т.е. заготовка ПП переворачивается, а затем она поступает на продолжение конвейера, а сам кантователь готов к приему следующей заготовки.
Привод поворота реверсивный, поэтому можно переворачивать заготовку ПП в любом направлении.
Формула изобретения
Кантователь преимущественно для поворота заготовок печатных плат, содержащий
корпус, вильчатый механизм поворота заготовок с соответствующим приводом, входной и выходной опорно-направляющие валики, блок управления, отличающийся тем,
что, с целью повышения надежности работы и расширения технологических возможностей, в него введен датчик поворота, а вильчатый механизм поворота выполнен в виде трубы с не менее чем двумя
вильчатыми захватами, каждый из которых снабжен датчиком наличия заготовки, установленным в середине захвата, при этом датчик поворота выполнен в виде установленных на корпусе и оптически связанных между собой источника света и фотоприемника, а также диска с прорезями, установленного на выходном валу привода поворота с возможностью прерывания оптической связи между источником света и фотоприемником, причем число прорезей диска соответствует количеству вильчатых захватов, а выходы датчиков наличия заготовок и датчика поворота соединены с входом блока управления, выход которого связан с приводом поворота.
3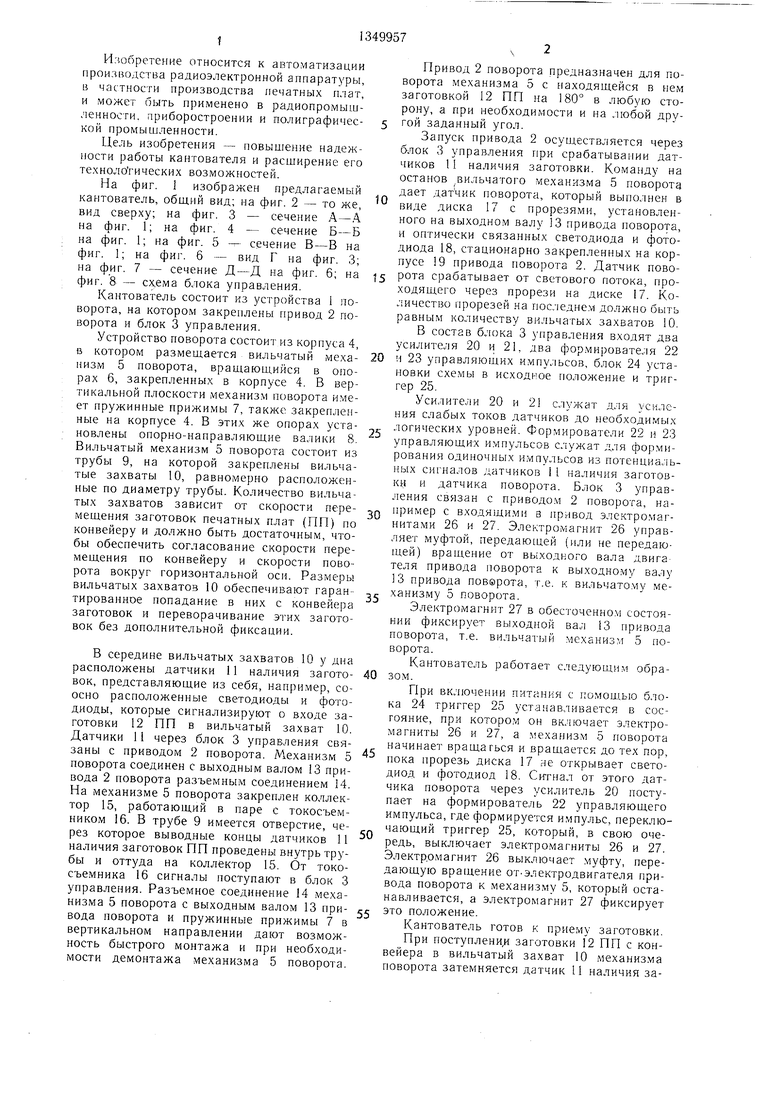
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления автоматом укладки кирпича | 1987 |
|
SU1560711A1 |
| ДЕЛИТЕЛЬНАЯ МАШИНА ДЛЯ НАРЕЗАНИЯ ДИФРАКЦИОННЫХ РЕШЕТОК | 1990 |
|
RU2027578C1 |
| Устройство для контроля металлизированных отверстий печатных плат | 1986 |
|
SU1420678A1 |
| Установка для изготовления стеклянных трубок уменьшеннего диаметра | 1983 |
|
SU1209615A1 |
| Система автоматического контроля работы электропушки для забивки чугунной летки доменной печи | 1988 |
|
SU1615188A1 |
| Агрегат для накатки зубчатых заготовок | 1987 |
|
SU1530315A1 |
| Станок для резки | 1988 |
|
SU1680518A1 |
| Система управления автоматом-садчиком кирпича | 1989 |
|
SU1648780A1 |
| Автоматизированная линия штамповки деталей | 1986 |
|
SU1389914A1 |
| Устройство автоматического управления автоматом для укладки кирпича | 1988 |
|
SU1648779A1 |
Изобретение относится к автоматизации производственных процессов и, в частности, может быть использовано в автоматической линии по производству печатных плат. Цель изобретения - повышение надежности процесса кантования и расширение технологических возможностей кантователя. Для этого в кантователь, содержащий корпус, механизм поворота, входной и выходной опорные валики, привод поворота и блок управления, введены датчики наличия заготовок и датчик поворота. При этом механизм поворота представляет собой трубу с жестко закрепленными на ней вильчатыми захватами, которая вращается в опорах, закрепленных в корпусе. Вращение передается от привода поворота. Работа датчиков согласована с помощью блока управления. Это обеспечивает срабатывание механизма поворота только при наличии заготовки в вильчатом захвате. Датчики наличия заготовок установлены посередине каждого вильчатого захвата, что обеспечивает контроль заготовки любой возможной щи- рины. Датчик поворота, установленный на выходном валу привода поворота, дает команду на останов механизма поворота для надежной выгрузки заготовки. 8 ил. «е (Л со 4 СО со сл 
i
А
6
10
72
U8 CPU2.1
Uб
8
10
12
в
цзиг.2
А25
Фиг. 4
12
9иг.7
Vuz.B
| Автоматический переворачиватель | |||
| Проспект фирмы Cugher, Швейцария, 1980. |
