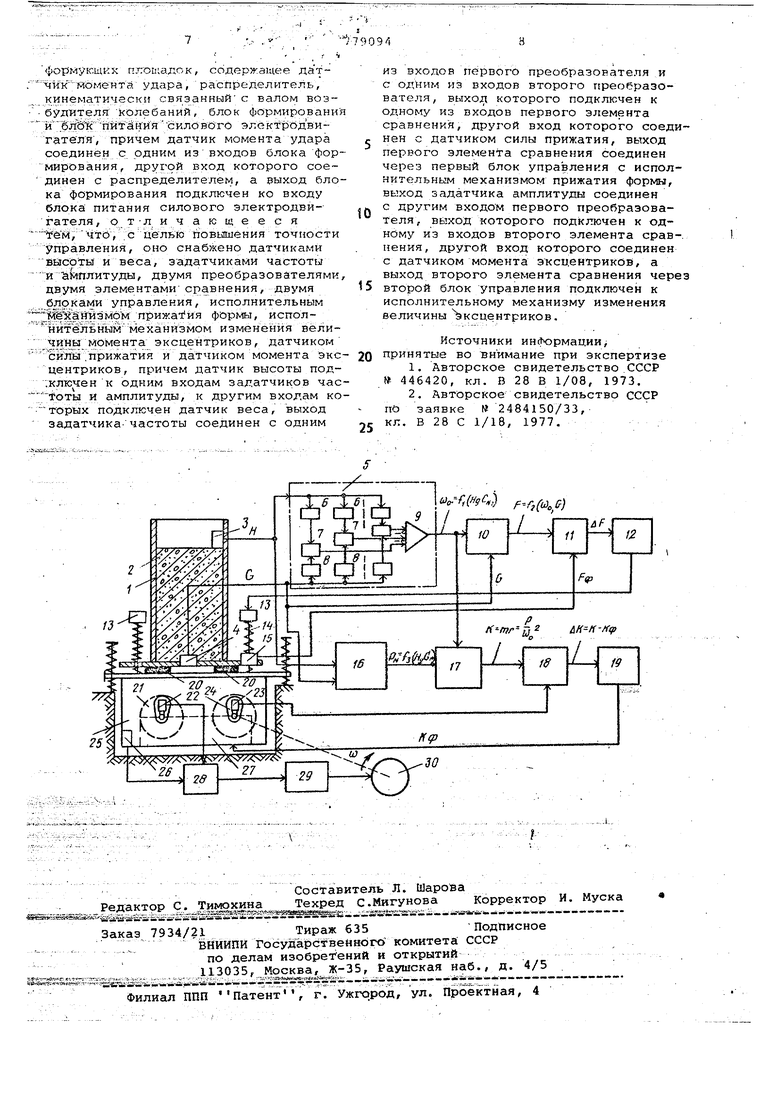
в колебательной системе форма.бетонная смесь. Кроме того, этим уст ройством интенсивность воздействия в процессе Формования вообще не регулируется . . Цель изобретения - повьппение точности управления. . Эта цель достигается тем, что уст ройство для автоматического управления режимом работы вибрационных формующих площадок, содержацее датчик момента удара, распределитель, кинематически связанный с валом возбудит ля колебаний, блок формирования и бл питания силового электродвигателя причем датчик момента удара соединен с одним из входов блока Формирования другьй вход которого соединен с распределителем, а выход блока формиров ния подключен ко входу блока питания силового электродвигателя, снабжено датчиками высоты и веса, задаткиками частоты и амплитуды, двумя преобразователями, двумя элементами сравнения, Лвумя блокамиуг равления, испол нительным механизмом прижатия формы, исполнительным механизмом изменения величины момента эксцентриков, датчйКОм СИЛЫ прижатия и датчиком момен та эксцентриков, причем датчик высоты подключен к одним входам задатчикйвчастотыи амплитуды, к другим входам которых подключей датчик веса вйШдзадатчика частоты соёдйнён с . одним из .входов первого преобразоватёля и с одним из входов второго пре образователя, выход которого.подключен к одному из входов первого элемёнт а сравнения, другой вход которог соединен с датчиком силы прижатия, йЁГХод ттервого элемента сравнения сое динен через первый блок управления с исполнительным механизмом прижатия Формы, выход задатчика амплитуды со ёдиней с другим входом первого пре образователя , выход которого подключен к одномуиз входов второго элемента сравнения, другой вход которого(;рединен с датчиком момента эксцен- Ьиков, а выход второго элемента сравне1 ия через второй блок управления подключен к исполнительному ме ханизму изменения величины эксцентриков . На чертеже схематически показано прёдлагаё1мЬе УстрбЙствб. Устройство содержит форму 1 для формирования изделий; бетонйув Ч;месь 2; датчик 3 высоты; датчик 4 веса; 5 частоты/ который включает в себя преобразователи 6, ключи 7, компараторы 8 и сумматор 9; преобразователь 10, элемент 11 сравнения, блок 12 управления, исполнительный механизм. 13 прижатия формы, пружину 14, датчик 15 силы прижатия, задатчик 16 амплитуды, преобразователь 17, элемент 18 сравнения, блок 19 -управления, упругие элементы 20, рас пределитель 21, вал 22 возбудителя колебани.й, датчик 23 момента эксцентриков 24, виброБозбудитель 25, датчик 26 момента удара, исполнительный .механизм 27 изменения величины эксцентриков, блок 28 формирования, блок 29 питания силового электродвигателя Устройство работает следующим образом. Для применяемой бетонной .смеси 2 предварительно строится зависимость между величиной оптимальной (расчетной) частоты воздействий весом G уплотняемой массы бетонной смеси при различных степенях уплотнения, которые характеризуются высотой Н, занимаемой этой смесью в форме 1. Данная зависимость iAj f (H,G) закладывается в основу работы задатчика 5 оптимальной частоты ударно-вибрационных воздействий, который формирует на своем выходе управляющий сигнал частоты ЮоС учетом высоты Н столба бетонной смеси в форме и его степени уплотнения на основе информационных сигналов, поступаюш.их от датчиков высоты 3 и веса 4 уплотняемой массы бетона. Задатчик 5 оптимальной частоты может быть выполнен, например, в виде блока функциональных преобразователей с управляемыми компараторами, предназначенного для реализации кусочно-линейной аппроксимации функций двух переменных, устанавливающих вза-; имосвязь .между высотой Н и весом G столба бетонной смеси и оптимальной при этом для бетона частотой уплотнения иЭо . Блок состоит из N функционсшьных преобразователей 6, поэволяющих воспроизводить зависимость UJoN f(H,G() для фиксированныхдискретных значений параметра G,, и ключей 7, управляемых компараторами 8. С помощью N аналоговых компараторов 8 осуи ествляется дискретизация входного параметра G согласно с выбором исходного (порогового) смещения. При этом компараторы 8 срабатывают при G G , Gf, . . .G, GUJ и включают n-ый ключ 7 при условии, когда GJJ ч G , . Через замкнутый ключ 7 на сумматор 9 от соответствующего функционального преобразователя б поступает Функция Ы f {H,GK). Функциональный преобразователь 6, входящий в Задатчик 5, может быть , например, по схеме с последовательными диодными ячейками и с одним суммирующим операционным усилителем. Функциональный преобразователь 10 предназначен для дальнейшего преобразования величины оптимальной частоты (о в эталонный сигнал величины силы F прижатия формы, обеспечивающей достижение равенства собственной частоты Ыф формы с бетонной смесью с оптимальной частотой для уплотнения (СОф UQ ) . Он может быть выполнен аналогично функциональным преобразователям 6 с целью реализации заранее установленной зависимости F f (иЗо ). Gf,) . Этот преобразователь формирует на своем выходе сигнал F на основе учета сигналов, поступающи с датчика 4 веса и с задатчика 5; Эталонный сигнал F с функционального преобразователя 10 и сигнал Fф фактической силы прижатия формы от датчика 15 силы прижатия сравниваются в элементе 11 сравнения на выходе ко торого в результате формируется сигнал UF (характеризующий величину и знак отклонения регулируемого параметра), поступающий на вход блока 12 управления, управляющего исполнитель ным механизмом 13 изменения силы при жатия формы пружиной 14. Таким образом, рассмотренный канал управления, состоящий из датчиков 3,4 и 15, задатчика 5 оптимальной частоты, функционального преобра зователя 10, элемента 11 сравнения, блока 12 управления и исполнительног механизма 13, воздействующего на фор му 1 через пружину 14, обеспечивает подстройку собственной : частоты формы с бетонной смесью юфпод оптимальную частоту С00 для уплотнения бетона, обеспечивая тем самым поддержание резонанса между этими колеблющимися массами (в системе бетон-форма с бетонной смесью). Одновременно в резонанс с формой 1 подстраивается частота вынуждающих воздействий вибровозбудителем 25, чт обеспечивается канашом управления состоящим из распределителя 21, вала 22возбудителя колебаний, вибровоз.будителя 25, блока 28 формирование И блока 29 питания силрвого электродвигателя 30. Таким образом, описанные выше два канала управления обеспечивают автоматическое .поддержание резонанса в системе вибратор-форма-бетонная смес между всеми колеблющимися телами. Одновременно третьим каналом управления изменяется интенсивность воздействия за счет регулирования ст тичеокого момента дебаланса. Этот ка .нал включает в себя задатчик 16 оптимальной амплитуды вынуждающей силы, на входы которого поступают сигналы от датчиков 3 и 4, функционгшьный преобразователь 17, элемент 18 сравнения, блок 19 управления, испол нительный механизм 27 изменения величины момента эксцентриков и датчик 23величины момента эксцентриков 24. Зёщатчик 16 оптимальной амплитуды вынуждающей силы выполняется аналогично задатчику 5 оптимальной частоты.В основу его работы заклёщывается предварите/ ьно установленная зависимость между величиной оптимальной амплитуды вынуждающей силы Р и весом высотой Н уплотняемой бетонной смеси, т.е. функцияiP fi, (Н, G). Задатчик 16 формирует на своем выходе сигнал, характеризующий величину Р оптимальной амплитуды вынуждаю щей силы для конкретных значений высоты Н и веса G столба бетонной смеси, величины которых измеряютсядатчиками 3 и 4. Этот сигнал поступает на вход функционального преобразователя 17, предназначенного для дальнейшего преобразования величины Р оптимальной амплитуды вынуждающей силы с учетом величины оптимальной частоты Юд колебаний, информация о которой поступает на второй вход преобразователя 17 с выхода задатчика 5:В эталонный сигнал, характеризующий требуемую величину К момента эксцентриков, которую необходимо обеспечить для поддержания оптимального режима формования. , Эталонный сигнал К mr г, (где m - неуравновешенная масса дебалансов; г - величина эксцентриситета этой массы) с выхода функционального преобразователя 17 и сигнал Кф (величина фактического момента эксцентриков) , поступающий от датчика 23, характеризующего величину момента эксцентриков (например, от датчика величины эксцентриситета массы дебалансов при нерегулируемой массе) сравниваются в элементе 18 сравнения. В результате сравнения на выходе элемента 18 формируется сигнал ДК К-Кф, характеризующий величину и знак отклонения этого регулируемого параметра, поступающий на вход блока 19 управления, управляющего исполнительным механизмом 27 изменения величины момента эксцентриков 24. Таким образом, задатчиками оптимальной частоты и интенсивности воздействия формируются управляющие сигналы с учетом высоты столба бетонной смеси в форме и его физико-механических свойств (степени уплотнения), по которым в результате работы одно-. / временно всех трех каналов управления под оптимальную частоту подстраивается собственная частота формы с бетонной смесью, в резонанс с которой, в свою очередь, автоматически подстраивается вибровозбудитель,, одновременно изменяя интенсивность воздействия по требуемому закону за счет регулирования величины момента эксцентриков. При автоматизации виброплощадок без свободного прижатия формы канал изменения собственной частоты формы не используется. Формула изобретения Устройство для автоматического управления режимом работы вибрационных
формукщиX пгетиадо к, содержащее лйт чйк Момента удара, распределитель, .кинематически связанныйс валом возбудителя/колебаний, блок формирования
;й ;;шйш; пи та ния -с кл о в о го э л с к тро д в и Тател , причем датчик момента удара соединен с одним извходов блока формирования, другой вход которого соединен с распределителем, а выход блока формирования подключен ко входу блока питания силового электродвигателя, о т-л и ч а ю щ е е с я ёй, что, с цёлЫо Повышения точности управления, оно снабжено датчиками ййсрты и веса, задатчиками частоты :и амплитуды, двумя преобразователями, двумя элементами сравнения, двумя блрками управления, исполнительным ;Ш хЖйгизм;рм прижатйя формы, испол нйтёльныммеханизмом изменения вёли/чи;ны момента эксцентриков, датчиком СИМЫ.прижатия и датчиком момента эксцентриков, причем датчик высоты под;клк; чен к одним входам задатчиков час;: ;fOTfca и амплитуды, к другим входам ко торых подключен датчик веса, выход задатчика-частоты соединен с одним
из входов первого преобразователя и с из входов второго преобразователя, выход которого подключен к одному из входов первого элемента сравнения, другой вход которого соеди5 ней с датчиком силы прижатия, выход первого элемента сравнения соединен через первый блок упраЗвления с исполнительным механизмом прижатия формы, выход задатчика амплитуды соединен
другим входом первого преобразователя, вйход которого подключен к одному из входов второго элемента орав-, нения, другой вход которого соединен с датчиком момента эксцентриков, а выход второго элемента сравнения через
- второй блок управления подключен к исполнительному механизму изменения величины Эксцентриков.
Источники информации, 0 принятые во внимание при экспертизе
1.Авторское свидетельство СССР 446420, кл. В 28 В 1/08, 1973.
2.Авторское свидетельство СССР по заявке W 2484150/33,
5 кл. в 28 С 1/18, 1977,