(54) СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
РЕЖИМОМ РАБОТЫ ВИБРОПЛОЩАДОК СО СВОБОДНЫМ
ПРИЖАТИЕМ ФОРМЫ ДЛЯ ФОРМОВАНИЯ ИЗДЕЛИЙ
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ автоматического управления режимом работы виброплощадок со свободным прижатием формы для формования изделий | 1978 |
|
SU774942A1 |
| Устройство для автоматического управления режима работы вибрационных формующих площадок | 1978 |
|
SU779094A1 |
| Способ автоматического управления работой машин ударно-вибрационного действия | 1980 |
|
SU1013572A1 |
| ВИБРОПЛОЩАДКА С УПРАВЛЯЕМОЙ ЧАСТОТОЙ И НАПРАВЛЕНИЕМ КОЛЕБАНИЙ | 2003 |
|
RU2236937C1 |
| ВИБРОПЛОЩАДКА ДЛЯ УПЛОТНЕНИЯ БЕТОННЫХ СМЕСЕЙ (ВАРИАНТЫ) | 2010 |
|
RU2450920C1 |
| ВИБРОПЛОЩАДКА ДЛЯ УПЛОТНЕНИЯ БЕТОННЫХ СМЕСЕЙ В ФОРМЕ | 1998 |
|
RU2157756C2 |
| УСТРОЙСТВО ДЛЯ ФОРМОВАНИЯ ИЗДЕЛИЙ ИЗ БЕТОННЫХ СМЕСЕЙ | 1996 |
|
RU2106246C1 |
| Способ настройки дебалансной вибромашины ограниченного возбуждения с асинхронным электродвигателем | 1982 |
|
SU1047541A1 |
| ВИБРОПЛОЩАДКА ДЛЯ ФОРМОВАНИЯ ЖЕЛЕЗОБЕТОННЫХ ИЗДЕЛИЙ | 1992 |
|
RU2036083C1 |
| ВИБРОПЛОЩАДКА С ИЗМЕНЯЕМОЙ АМПЛИТУДОЙ КОЛЕБАНИЙ | 2002 |
|
RU2233738C2 |
Изобретение относится к промышленности строительных материалов, в частности к способам формования железобетонных изделий на внбростолах с вертикально направленными ко.1ебаниями.
По основному авт. св. № 774942 известен способ автоматического управления режимом работы виброплошадок со свободным прижатием формы для формования изделий, включающий формование сигналов в момент удара рабочего органа о форму с бетонной смесью и в момент прохождения дебалансом оптимального положения и обеспечение совпадения обоих импульсов изменением скорости вращения дебалансов. В этом cnoco6ie измеряют высоту и степень уплотнения укладываемой в форму бетонной смеси, для найденных значений высоты слоя и степени его уплотнения по тарировочно14 зависимости определяют оптимальные значения амплитуды вынуждающей силы, сравнивают их с фактическими знаГчениями и по результатам сравнения регулированием величины статического момента массы дебаланса изменяют интенсивность воздействия до равейства между фактическими и расчетными зиаче-. ниями амплитуды вынуждающей силы. Он
предусматривает изменение в процессе формования только амплитуды колебаний и амплитуды внешних воздействий.
Однако этот способ не обеспечивает равномерного уплотнения, поскольку в нем не осуществляются изменение собственной частоты колебаний формы с бетонной смесью достижения равенства с оптимальной частотой столба бетонной смеси (до наступления резонанса в системе форма-бетонная смесь) и поддержание резонанса в процессе формования.
10
Цель изобретения - повышение равномерности уплотнения бетонной смеси.
Указанная цель достигается тем, что в способе автоматического управления режимом работы виброплощадок со свободным
5 прижатием формы для формования изделий дополнительно строят тарировочную зависимость оптимальных значений частоты колебаний от высоты и степени уплотнения бетонной смеси, для измеренных значений вы|Соты слоя и степени его уплотнения по тарировочной зависимости определяют оптималь20ые значения частоты колебаний, сравнивают их с фактическими значениями и по ре зультатам сравнения регулированием велиИНЫ силы прижатия формы к возбудителю олебаний изменяют собственную частоту ор.мы с бетоиной смрсью до равенства с птимальной частотой для уплотняемого лоя бетонной смеси.
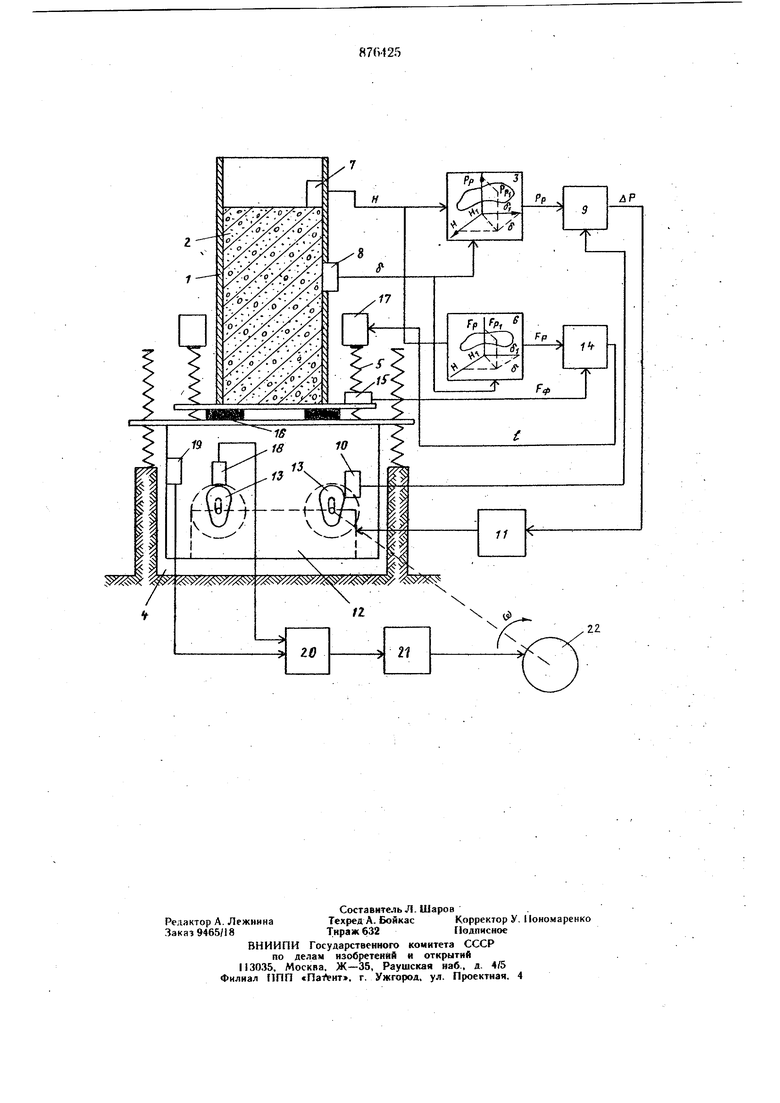
На чертеже представлена функциональ-, ная схема устройства, реализующего предлагаемый способ.
Для применяемой при формовании в форме 1 бетонной смеси 2 предварительно строятся тарировочные зависимости между опти- ,,, мальной величиной амплитуды вынуждающей силы Р. оптимальной частотой а/о колебаний и высотой И бетонной смеси при различных степенях уплотнения, т.е. Рр f,(H,S); w fj(H,S)/
Завксимость Рр f((HiS) закладывает- is ся в основу работы функционального преобразователя 3, задачей которого является формирование на выходе сигнала, соответствую цего оптимальной (расчетной) величине амплитуды вынуждающей силы Рр (например значению амплитуды Рр при высоте стоя бетонной -смеси Н( и степени его уплотнения S ).
Зависимость tJe fa.OtS), выраженная через величину силы прижатия формы I к вибровозбудителю 4 с помощью пружин 5, 25 закладывается в основу работы функционального преобразователя 6, задачей которого является формирование на выходе сигнала, соответствующего оптимальной (расчетной) величине собственной частоты колебаний формы с помещенной в ной бетонной сме- зо СЬЮ {Р(з(НЛ)).
С помощью датчика 7 высоты и датчика 8 степени уплотнения (плотности) бетонной смеси измеряются величина Н высоты и величина S степени уплотнения и преобра- зуются в сигналы, которые подаются на соответствующие разноименные входы, функциональных преобразователей 3 и 6,
С выхода преобразователя 3 снимается сигнал Рр оптимальной (расчетной) величины амплитуды вынуждающей силы и на- 4о правляется в качестве эталонного на один из выходов элемента 9 сравнения, к другому входу которого от датчика 10 подводится сигнал Яр, характеризующий величину фактической амплитуды вынуждающей силы. Разность сигналов на выходе элемента 9 сравнения подается к исполнительному блоку 11, который формирует сиг налы, управляющие приводом регулятора 12 изменения амплитуды вынуждающей силы до достижения равенства между Рф и Рр. Требуемое изменение величины F фактической амплитуды вынуждающей силы может быть достигнуто, например, соответствующим изменением момента эксцентриков (статического момента массы Дебалансов 13)
Во втором канале управления с выхода $5 преобразователя 6 снимается сигнал Fp оптимальной (расчетной) величины силы прижатия формы, характеризующий достижение
равенства собственной частоты формы и оптимальной частоты для бетона, и направляется в качестве эталонного на один из входов элемента 14 сравнения, к другому входу которого от датчика 15 подводится сигнал Rp, отражающий величину фактической силы прижатия формы I к вибровозбудителю 4 пружинами 5 через упругие прокладки 16. Разность сигналов ДР Рр-Rp на выходе элемента 14 сравнения подается к исполнительному устройству 17, обеспечивающему, например, изменением величины поджатия пружин 5 требуемое регулирование силы прижатия формы до достижения равенства между Рц, и Рр.
Настройка на резонансный режим (третий канал управления) системы вибраторформа осуществляется по известному способу. Для этого предусмотрен специальный канал управления, состоящий из датчика 18 положения дебаланса в момент удара, датчика 19 момента прохождения дебалансом оптимального положения, преобразователя 20 и исполнительного устройства 21, управляющего скоростью вращения вала приводного двигателя 22,
В тех случаях, когда импульсы от датчиков 18 и 19 не совпадают по времени и зависимости от величины и знака рассогласования, преобразователь 20 формирует управляющий сигнал, по которому исполнительное устройство 21 производит требуемую корректировку на ходу скорости вращения с вала возбудителя колебаний, добиваясь совпадения по времени этих сигналов и обеспечивая тем самым по.адержание заданного режима работы.
Формула изобретения
Способ автоматического управления режимом работы виброплощадок со свободным прижатием формы для формования изделий по авт. св. № 774942, отличающийся тем, что, с целью повышения равномерности уплотнения бетонной смеси, дополнительно строят тарировочную зависимость оптимальных значений частоты колебаний от высоты и степени уплотнения бетонной смеси, для измеренных значений высоты слоя и степени его уплотнения по тарировочной зависимости определяют оптимальные значения частоты колебаний, сравнивают их с фактическими значениями и по результатам сравнения регулированием величины силы .прижатия формы к возбудителю колебаний изменяют собственную частоту формы с бетонной смесью до равенства с оптимальной частотой для уплотняемого слоя бетонной смеСи.
Источники информации, принятые во внимание гэри экспертизе 1. Авторское свидетельство СССР № 774942, кл. В 28 В 1/08, 1978.
