Изобретение относится к весоизмерительной технике и может использоваться в промышленности, сельском хозяйстве и на транспорте для взвешивания железнодорожного подвижного состава в движении.
Известен способ потележечного взвешивания вагонов на ходу, по которому определяют направление движения с помощью крайних путевых датчиков, определяют момент наезда каждой тележки на весы путем подсчета числа наезжающих осей двумя путевыми датчиками с выбранным расстоянием между ними, исключают локомотив с помощью схемы наезда, определяют момент выезда каждой тележки путем подсчета числа осей с помощью путевых датчиков, установленных по краям платформы, формируют по сигналам наезда и выезда сигнал “Измерение”, взвешивают тележку, суммируют веса тележек попарно и регистрируют (1).
Недостаток известного способа заключается в применении для идентификации объектов путевых датчиков, ненадежно работающих в сложных условиях промышленного производства, особенно при широко применяемой очистке путей выхлопами турбинных двигателей.
Известен принятый за аналог способ потележечного взвешивания вагонов на ходу, включающий непрерывное измерение нагрузки на весовую платформу, длина которой меньше базы вагонов, но больше базы локомотива, подсчет числа находящихся на весовой платформе осей вагона по ступеням изменений нагрузки на весовую платформу, регистрацию нулевых значений нагрузки на платформу, запоминание ближайших наибольших значений нагрузки перед нулевыми значениями и регистрация их как вес первой тележки, подсчет числа n подряд съехавших осей перед нулевым значением нагрузки и регистрацию веса второй тележки после наезда n осей подряд (2).
Недостатком аналога является тот факт, что в обращении, хотя и весьма редко, имеются локомотивы с базой, большей, чем у вагонов, и наоборот. Так, у локомотива ТГМ-6А расстояние (провал) между осями в середине - 5,9 метра, а у платформы для горячих грузов - 4,5 метра. Имеются и другие объекты с меньшей базой (например, хопперы). Таким образом, разделять объекты на локомотивы и вагоны по базе (провалу) в середине объекта можно только для ограниченной категории объектов. Кроме того, на весовой платформе аналога (длиной 5,4 м) очень непросто осуществить сколько-нибудь точное взвешивание 4-осной тележки 8-осного вагона. Длина такой тележки составляет 5,05 м, так что все измерение нужно произвести на длине пути 5,4-5,05=0,35 м. При не самой большой скорости объекта 7,2 км/ч (2 м/с) время измерения всего 0,17 с, что составляет лишь долю периода собственных колебаний вагонов (в среднем 2,5-4,0 Гц). Измерение с требуемой точностью в такой короткий промежуток времени представляет сегодня скорее научную, но не практическую задачу.
Задачей, на решение которой направлено изобретение, является создание универсальной автоматической системы, способной без активного участия человека взвешивать все типы вагонов, обращающихся на железных дорогах, а также распознавать все типы локомотивов. Потележечное взвешивание принципиально точнее, чем поосное или поколесное, хотя бы потому, что устраняет влияние перераспределения осевых нагрузок тележки непосредственно в процессе взвешивания имеющимися в тележке механизмами - балками и пружинами. При потележечном взвешивании все оси тележки находятся на весах, и неважно, как усилия распределены между осями тележки.
Однако вследствие наличия многих типоразмеров тележек (2-, 3- и 4-осных) вагонов и локомотивов, а также многообразия баз и расстояний между сцепками не существует весовой платформы такой длины, которая обеспечила бы одновременно удовлетворительную идентификацию объектов (без применения путевых датчиков) и достаточное время измерения.
В самом деле, для взвешивания в движении, например, 4-осной тележки, длина которой по осям составляет 5,05 метра, требуется весовая платформа хотя бы на метр длиннее (т.е. 6 м), а при такой длине не могут быть обособлены и взвешены тележки других объектов (например, многие типы хопперов). Все технические решения, известные до настоящего времени, носили частный характер, т.е. были предназначены для какой-то группы типов вагонов.
Технический результат достигается за счет того, что предлагаемый авторами поэлементный способ взвешивания предусматривает “чистое” потележечное взвешивание только для 2-осных или (при несколько большей длине весовой платформы) 3-осных тележек. Заметим, что в 6-осных вагонах (3-осные тележки) перевозятся - обычно навалом - малоценные грузы, так что взвешивание 3-осной тележки в два приема (две оси + еще одна) вполне допустимо по достигаемой точности. 4-осная тележка, состоящая из двух 2-осных, взвешивается также в два приема, т.е. все же потележечно, хотя между 1-й и 2-й тележками имеется механизм уравновешивания. Заметим, что 8-осные вагоны, в которых используются 4-осные тележки, используются в народном хозяйстве весьма редко. Таким образом, поэлементное взвешивание предоставляет лучшие условия для 2-осных тележек, составляющих 95% отечественного парка вагонов. Для других типов тележек - условия удовлетворительные.
Существенность технического решения заключается в том, что способ поэлементного взвешивания железнодорожных объектов, включающий измерение и запоминание показаний d1, d2... dn нагрузки на весы от первого до последнего максимума при проезде каждой оси или группы осей, определение веса оси или группы осей как среднего показаний и запоминание результата, подсчет числа осей на весах по ступеням нагружения и разгружения, регистрацию в качестве значений веса первой и второй тележек выбранных результатов перед и после состояния “весы свободны” в соответствии с осностью тележек, определение веса вагона как суммы весов тележек, дополняют тем, что осность и типы тележек распознают по комбинациям ступеней нагружения - разгружения, а длину платформы L выбирают по формуле
Mminmo+Мт>L>Мт+Lи,
где - Мminmо - минимальное межосевое расстояние между соседними вагонами во взвешиваемых составах, Мт - база 2-осной тележки, lи - минимально необходимый путь измерения.
Дополнительно, из показаний d1, d2... dn после определения средних значений для выбранных результатов исключают по известному критерию выбросы и повторяют вычисление средних значений.
Кроме того, при первичной и последующих поверках весов прокатывают по весам в прямом и обратном направлениях объекты, определяют и заносят в память весового терминала коэффициенты направления Кн, а в процессе работы результаты взвешивания соответствующих тележек каждого вагона умножают на коэффициенты направления.
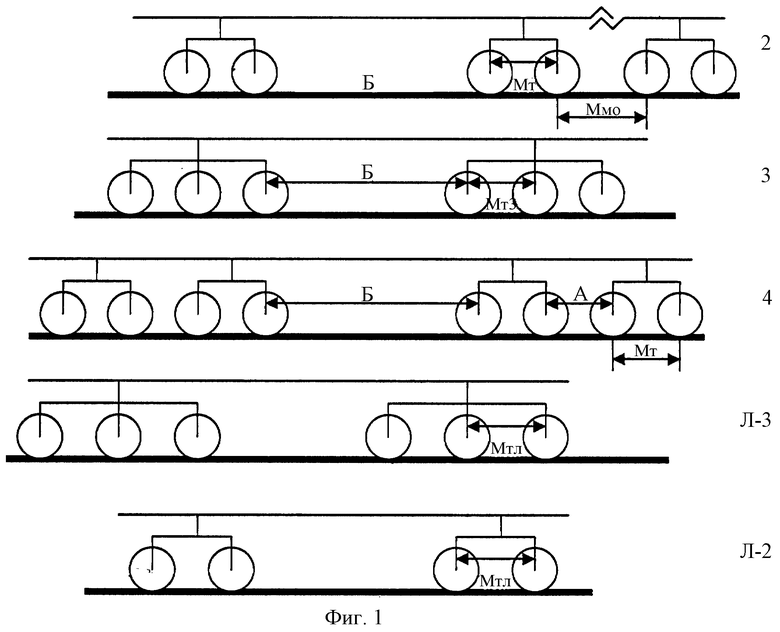
На фиг.1 изображены кинематические схемы объектов, с которыми оперирует способ, на фиг.2 - блочная схема устройства, реализующего способ, на фиг.3, 4, 5, 6 приведены диаграммы нагружения - разгружения, возникающие при проезде железнодорожных объектов, показанных на фиг.1, по весам при различных длинах платформы. Фиг.7 поясняет принцип обработки измерительного сигнала. Фиг.8 поясняет используемый в способе метод учета неровностей пути.
Существенные отличия применительно к данному способу имеют пять типов железнодорожных объектов (фиг.1). Это двухосные (позиция 2), трехосные (позиция 3) и четырехосные (позиция 4) тележки соответственно четырехосного, шестиосного и восьмиосного вагонов, а также трехосные (позиция Л-3) и двухосные (позиция Л-2) тележки шестиосного и четырехосного локомотивов, причем последние необходимо в большинстве случаев распознать и исключить из числа взвешиваемых объектов. Существеннным и универсальным различием между вагонами и локомотивами является межосевое расстояние тележек. У вагонов (поз. 2, 4 фиг.1) оно составляет Мт=1,85 метра, а у локомотивов (поз. Л-3 и Л-2) Мтл=2,1 метра. У трехосной тележки межосевые расстояния Мтз=1,75 метра. Расстояние между двухосными тележками четырехосной тележки А=1,35 метра. Эти геометрические размеры играют важное значение для понимания работы способа.
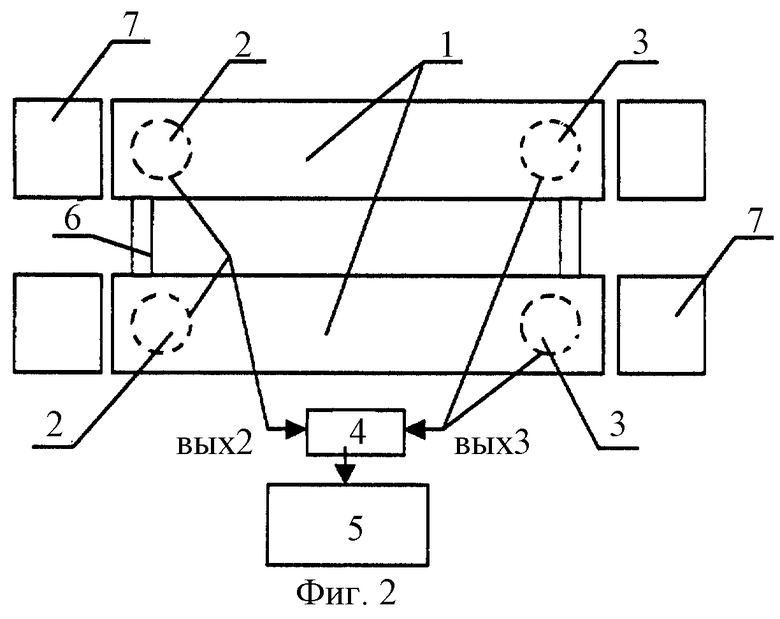
Устройство, реализующее способ (фиг.2), содержит, например, весы, состоящие из балок 1, опирающихся на тензодатчики 2 и 3 (например, типа С16А С3 фирмы НВМ), выходы которых вых.2 и вых.3 подсоединены к измерительному преобразователю 4 (например, типа Микросим 0801 фирмы Метра), стандартным интерфейсом (например, RS-485), связанным с персональным компьютером 5 (например, Pentium). Балки 1 соединены между собой и фундаментом упорами 6. На балки 1 и подъездные пути 7 уложены рельсы (на фиг.2 не показаны).
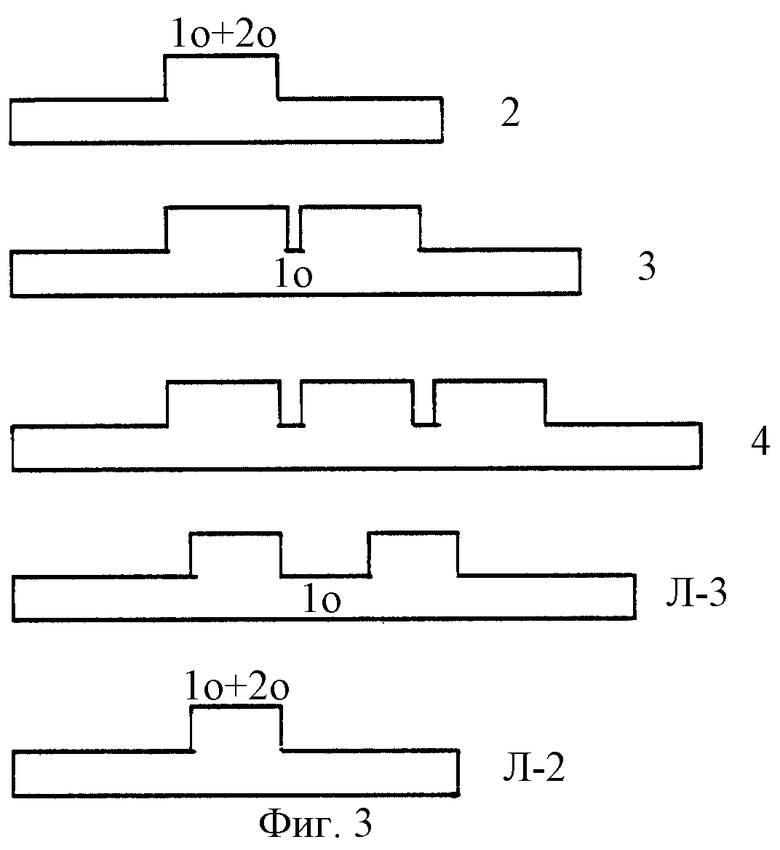
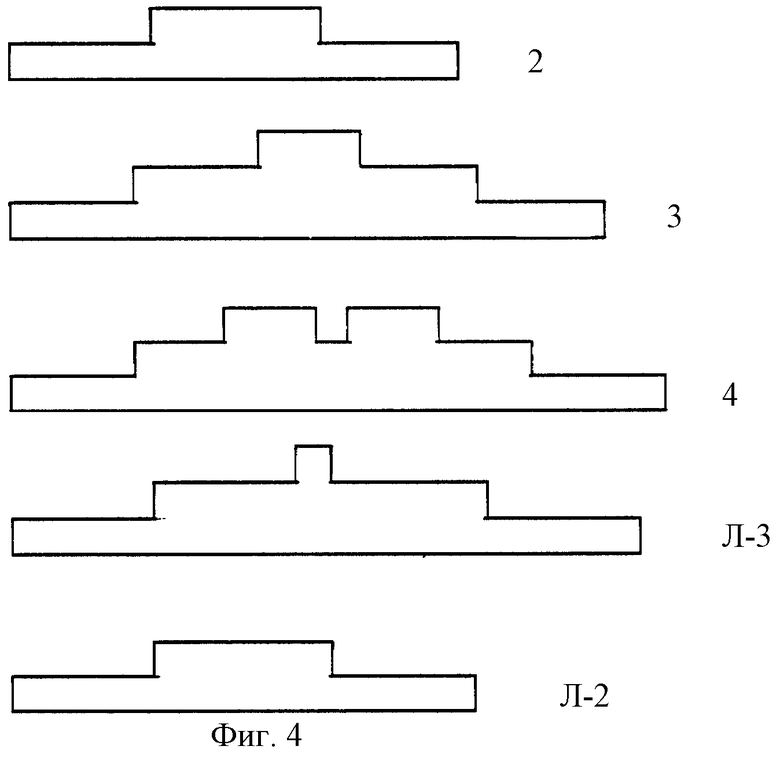
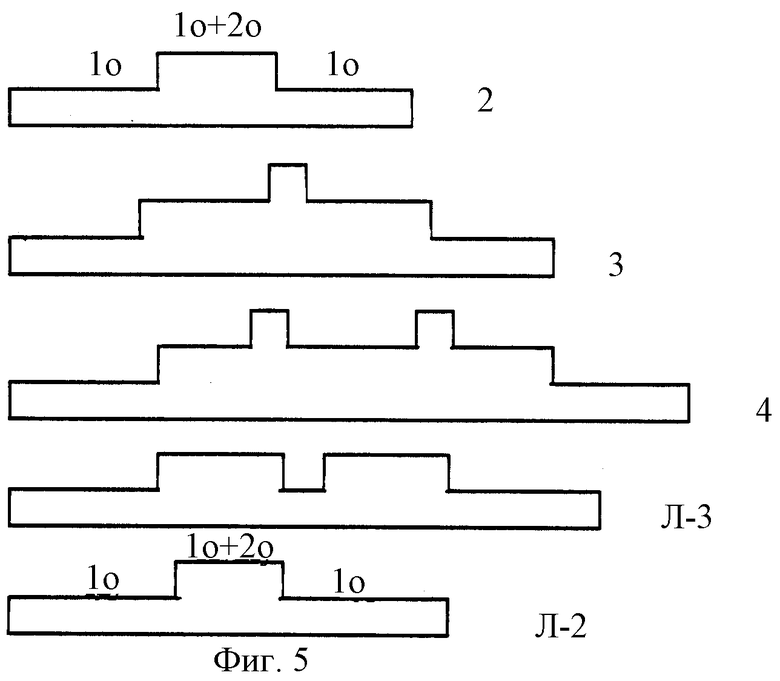
На фиг.3 приведены в относительном масштабе диаграммы нагружения - разгружения тележками объектов, показанных на фиг.1, весов с длиной платформы L от 2,2 до 3,1 метра, на фиг.4 - с длиной платформы от 4,2 до 5,0 метров, а на фиг.5 - с длиной платформы от 3,2 до 4,1 метра.
Как видно из диаграмм фиг.3, при длине весов до 3,1 метра одинаковые фигуры ("образы") имеют 2-осные (вагоны обозначены “2”, локомотивы -“Л-2”) и 3-осные (вагоны обозначены “3”, локомотивы - “Л-3”) тележки вагонов и локомотивов, и для их распознавания необходимо анализировать продолжительность нагружений, которая - в отличие от формы - зависит от скорости объекта. "Горб" 1о+2о (1-я ось+2-я ось) на позиции 2 появляется при длине весов, большей Мт=1,85 метра, а на позиции Л-2 при длине, большей Мтл=2,1 метра. Поскольку речь идет о поэлементном взвешивании, то минимально возможная длина весов должна быть больше Мт на величину пути измерения Lи, которую сложно представить менее 0,5 метра при скоростях движения 5-10 км/ч. Следовательно, совпадение диаграмм нагружения - разгружения для 2-осных тележек вагонов и локомотивов при поэлементном взвешивании неизбежно. Что касается “провалов” 1о на поз. 3 и Л-3, появляющихся потому, что длина L=3,1 метра меньше, чем длина 3-осной тележки 2·Мтз=3,5 метра и тем более меньше длины трехосной тележки локомотива 2·Мтл=4,2 метра, то с увеличением длины весов (см. фиг.5) “образы” трехосных тележек вагонов и локомотивов становятся разными. При дальнейшем увеличении длины весов L свыше 4,2 метра (2·Мтл=4,2 метра!) указанные диаграммы (3 и Л-3) изменяют форму (см. фиг. 4) и вновь становятся похожими. Кроме того, длина весов L должна быть меньшей, чем Мт+Ммо (см. фиг.1), чтобы при выезде 2-осной тележки из межсцепного пространства выезжало в любом случае только две оси, иначе не определить осность тележки. Наиболее приемлемой с точки зрения идентификации объектов и достаточного времени для измерения, на взгляд авторов, является длина L от 3,2 до 4,0 метра (фиг.5), при которой совпадают только “образы” 2-осных тележек вагонов и локомотива (2 и Л-2), различаемые дополнительно отношением участков, нагруженных одной или двумя осями.
Фиг.5 построена для длины L=3,65 метра. Для такой же длины построена фиг.6, показывающая диаграммы нагружения - разгружения при стыковке в составе различных тележек. Поясним с их помощью возможность осуществления способа.
При длине L=3,65 метра весы всегда разгружаются в центре каждого объекта, безразлично - вагона или локомотива, но не всегда разгружаются в стыке между вагонами, т.к. имеются объекты (например, хопперы или цистерны) с расстоянием между сцепками Ммо (см. фиг.1, поз. 2) порядка межосевого расстояния тележек Мт. Если mмо>l, весы высвобождаются как в середине, так и в междусцепном пространстве вагона или локомотива. В этом случае, как это видно из фиг.5, тележка каждого объекта имеет специфический неизменный при любых скоростях объекта вид (“образ”), закладываемый в память компьютера 5 при пуске весов. Двухосная тележка (поз. 2 фиг.5) отличается от двухосного локомотива (поз. Л-2 фиг.5) тем, что отношение продолжительностей участков, нагруженных одной и двумя осями L1o/L(1o+2o), равно 2,05 для тележек вагонов и 2,7 для тележек локомотивов. Возможно различать вагоны и локомотивы и по другим признакам, например по весу. Локомотив обычно существенно тяжелее вагона.
Поскольку в междусцепном пространстве весы высвобождаются не всегда, предыдущий абзац дан для пояснения, а предлагаемый способом алгоритм взвешивания, работающий при любых технологических ситуациях, состоит в следующем. Рассмотрим позиции фиг.6, представляющей диаграммы нагружения - разгружения при проезде по весам различных комбинаций сцепленных тележек: двухосной с двухосной (поз. 2+2), двухосной с трехосной (поз. 2+3), трехосной с четырехосной (поз. 3+4), локомотива с двухосной тележкой (поз. Л+2) и др. Левая часть фиг.6 - это вторые тележки предыдущих вагонов (локомотивов), которые взвешиваются после того, как взвешены первые тележки и определена их осность.
Так, 2-осные тележки взвешиваются (отмечено стрелкой над участком), когда на весы после разгруженного состояния въехало 2 оси, т.е. вся тележка, поскольку первая тележка данного вагона определена ранее как 2-осная. Более сложно - поэлементно - взвешиваются 3-осные и 4-осные тележки. Так, у трехосной тележки (поз. 3+3) взвешивается (отмечено фигурной стрелкой над участком) сначала первая ось, затем через два наезда и один выезд - 2 и 3 оси вместе. За вес тележки принимается сумма всех трех осей. Четырехосная тележка (поз. 4+4) также взвешивается в 2 приема: при наезде первых 2-х осей взвешиваются они, затем после двух наездов и двух выездов взвешиваются две следующие оси. Результатом - сумма взвешиваний.
После второй тележки предыдущего вагона на весы наезжает первая тележка следующего (правая половина фиг.6), причем неважно, высвобождаются между ними весы или нет. В любом случае идентификация первой тележки вагона происходит после ее выезда с весов по следующей логике:
- если тройных наездов перед выездом тележки не было (правая половина поз. 2+2 фиг.6) - проезжает 2-осная тележка;
- если при этом участки 1о и (1о+2о) примерно равны по продолжительности, это тележка вагона, если участок 1о больше участка (1о+2о) (правая половина поз. 2+Л фиг.6) - это локомотив;
- если перед выездом тележки был одиночный тройной наезд (правая половина позиций 3+3, 2+3 фиг.6) - проезжает 3-осная тележка;
- если перед выездом тележки дважды был тройной наезд (правая половина позиций 4+4, 2+4,3+4 фиг.6) - проезжает 4-осная тележка.
Моменты взвешиваний, идущих в результат, т.е. составляющих вес тележек, обозначены на фиг.6 (правая половина) стрелками. Поскольку в процессе измерения непонятно, какая дальше последует комбинация наездов-выездов, взвешивать придется все участки с двойными наездами осей, а потом отдельные выбирать для обработки, а другие - погашать.
Поясним, как происходит процесс измерения, с помощью фиг.7.
При наезде в момент времени to на весы осью объекта нагружаются тензодатчики 2 и 3, измерительный преобразователь 4 начинает с частотой 500 Гц измерять поступающий сигнал и передавать коды (показания) в персональный компьютер 5. Персональный компьютер 5, сравнивая поступающие коды, определяет первый максимум первого участка mах11. После этого все показания от to до t11 погашаются, и компьютер 5 начинает накапливать показания, измеряемые преобразователем 4 в промежутке t11-t12, вычисляя и сравнивая среднее всех показаний от момента t11 и текущее среднее, например, десяти последних показаний. Динамическая составляющая (помеха) реально составляет величину до 10%, поэтому в промежутке от t12 до t21 текущее среднее резко (примерно в 2 раза) возрастает. Компьютер 5 регистрирует наезд очередной оси, определяет, например, перебором и сравнением показаний в окрестностях промежутка t12-t21 максимумы max12 и max21 и погашает все коды (показания) между ними. Аналогично производится формирование блока показаний, соответствующего проезду по весам группы из 2-х осей в промежутке t21-t22 и прочих групп во всех других ситуациях.
После выделения блоков показаний и подсчета их средних значений компьютер 5 определяет принадлежность объекта к одной из диаграмм, описанных в фиг.5, 6. Пусть, например, установлено, что объект - 2-осная тележка. Тогда показания до t21 и после t22 погашаются, а показания внутри этого интервала, соответствующие проезду по весам двухосной тележки, подвергают дополнительной обработке. Из массива показаний промежутка t21-t22, например, по содержательным критериям удаляют выбросы, затем вновь подсчитывают среднее Аср, которое и принимается за вес тележки. Использование содержательных критериев весьма эффективно и просто, т.к. в общем известно, что измеряется. Нагрузка на ось на магистральных дорогах ограничена величиной около 20 тонн. Вес порожних объектов также известен, например тара 4-осного вагона около 20-22 тонн. Динамическая составляющая - по опыту - составляет 5-10%, редко более. Отсюда правило: после вычисления среднего Аср все показания, отличающиеся от Аср, предположим, на 15%, считаются выбросами и исключаются из выборок.
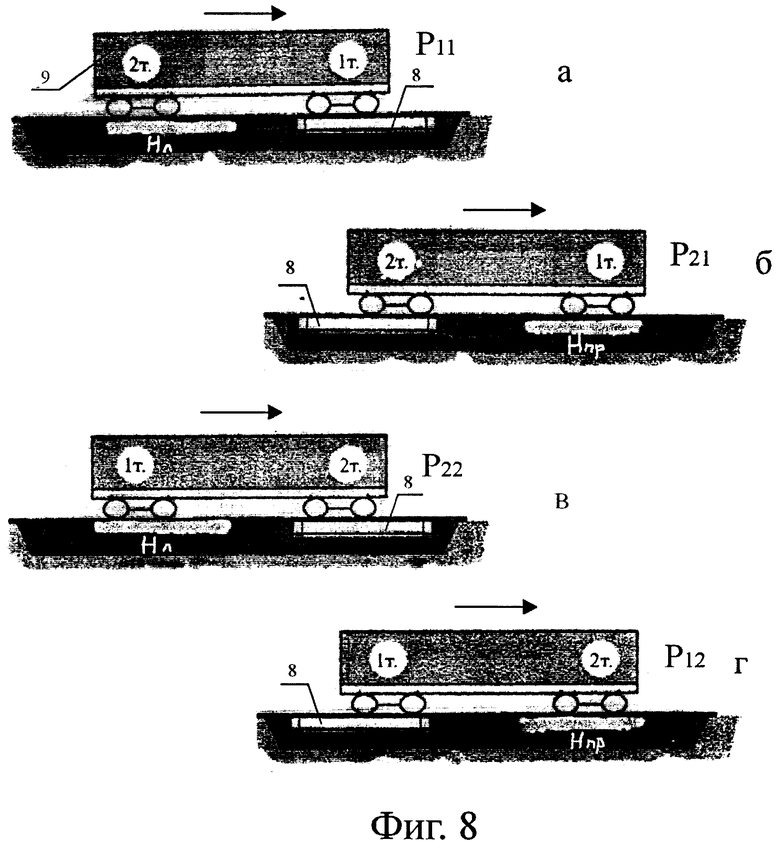
Существенное влияние на точность измерения оказывают силовые и геометрические неровности подъездных путей 7. При этом геометрические неровности могут быть отрихтованы, в отличие от силовых, проявляющихся под нагрузкой. Способ предлагает снизить влияние неровностей подъездных путей 7 на точность измерения следующим образом.
При первичной и текущих поверках весов 8 выполняется следующая процедура (см. фиг.8). По весам 8 прокатывают (позиция а) тележку 1 вагона 9 и запоминают полученное значение веса тележки Р11. (Первый индекс - номер тележки, второй - номер взвешивания.) Заметим, что при перемещении тележки 1 по весам 8 тележка 2 прошла определенный участок подъездного пути 7 Нл слева по фиг.8 от весов, и неровности участка Нл, очевидно, повлияли на результат P11. Далее по весам 8 прокатывают тележку 2 (позиция б) и запоминают полученное значение веса Р21. Заметим, что при перемещении тележки 2 по весам 8 тележка 1 прошла определенный участок подъездного пути 7 Нпр справа по фиг.8 от весов, и неровности участка Нпр, очевидно, повлияли на результат Р21. После этого вагон 9 маневрами на путях разворачивают на 180° и вновь подают на весы 8.
Первой в этом случае по весам 8 прокатывают (позиция в) тележку 2 и запоминают полученное значение веса тележки Р22. Заметим, что при перемещении тележки 2 по весам 8 тележка 1 прошла прежний участок подъездного пути 7 Нл слева по фиг.8 от весов, и неровности участка Нл, очевидно, повлияли на результат Р22 так же, как ранее влияли на P11. Далее прокатывают тележку 2 (позиция г) и запоминают полученное значение веса P12. Заметим, что при перемещении тележки 2 по весам 8 тележка 1 прошла участок подъездного пути Нпр справа по фиг.8 от весов, и неровности участка Нпр, очевидно, повлияли на результат Р12 так же, как ранее на Р21.
Очевидно, должно быть P11=P12, a P21=P22, так как тележки взвешивались одни и те же. Однако из-за неровностей подъездных путей 7 результаты измерения будут, скорее всего, различными. Предположим, занижены результаты взвешивания Р11 и Р22, т.е. занижает левый край подъезных путей 7. Возьмем отношения P12/P11=Кн1 и Р21/Р22=Кн2, которые являются масштабирующими коэффициентами направления. Среднее значение (Kн1+ Кн2)/2=Кн по результатам нескольких прокатываний записывают в Кн память компьютера 5 масштабирующий коэффициент. При движении по весам 8 слева направо компьютера 5 умножают на Кн результаты взвешивания первых по ходу тележек, а при движении справа налево - вторых по ходу. Разумеется, для тележек различной осности могут быть как одинаковые, так и различные масштабирующие коэффициенты в зависимости от состояния подъездных путей 7.
Источники информации
1. Взвешивание движущихся объектов. Обзорная информация ЦНИИТЭИ приборостроения. М., 1974, с.21-23.
2. Авторское свидетельство СССР №1016688, G 01 g 19/04, 04.01.82.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ВЗВЕШИВАНИЯ ЖЕЛЕЗНОДОРОЖНЫХ ОБЪЕКТОВ | 2012 |
|
RU2507486C1 |
| СПОСОБ ВЗВЕШИВАНИЯ ЖЕЛЕЗНОДОРОЖНЫХ ОБЪЕКТОВ | 2008 |
|
RU2390735C1 |
| ВАГОННЫЕ ВЕСЫ | 2002 |
|
RU2239800C2 |
| СПОСОБ ПОЭЛЕМЕНТНОГО ВЗВЕШИВАНИЯ АВТОМОБИЛЕЙ | 2002 |
|
RU2239798C2 |
| Способ потележечного взвешивания вагонов на ходу | 1982 |
|
SU1016688A1 |
| Способ взвешивания подвижных объектов | 1986 |
|
SU1453179A1 |
| Устройство для взвешивания железнодорожного подвижного состава | 1984 |
|
SU1234728A1 |
| Устройство для потележечного взвешивания вагонов в движении | 1982 |
|
SU1027530A1 |
| Способ поосного взвешивания железнодорожных вагонов в движении | 1989 |
|
SU1749719A1 |
| Устройство для потележечного взвешивания железнодорожного подвижного состава | 1985 |
|
SU1285324A1 |


Изобретение относится к весоизмерительной технике и может использоваться в промышленности, сельском хозяйстве и транспорте. Способ поэлементного взвешивания железнодорожных объектов включает измерение и запоминание показаний нагрузки на весы от первого до последнего максимума при проезде каждой оси или группы осей, затем определение веса оси или группы осей как среднего показаний и запоминание результата, подсчет числа осей на весах по ступеням нагружения и разгружения и регистрацию в качестве значений веса первой и второй тележек выбранных результатов перед и после состояния “весы свободны” в соответствии с осностью тележек, причем вес вагона определяется как сумма весов тележек. Число осей и тип тележек распознают по комбинациям ступеней нагружения - разгружения. Технический результат заключается в создании универсальной автоматической системы взвешивания различных типов железнодорожных вагонов без участия человека. 2 з.п. ф-лы, 8 ил.
Mmin mo+Mт>L>Mт+Lи,
где Mmin mo - минимальное межосевое расстояние между соседними вагонами во взвешиваемых составах;
Мт - база 2-осной тележки,
Lи - минимально необходимый путь измерения.
| Взвешивание движущихся объектов | |||
| Обзорная информация ЦНИИТЭИ приборостроения | |||
| - М., 1974, с.21-23 | |||
| Способ потележечного взвешивания вагонов на ходу | 1982 |
|
SU1016688A1 |
| Устройство для потележечного взвешивания железнодорожных вагонов в движении | 1984 |
|
SU1174771A1 |
| Устройство для потележечного взвешивания железнодорожных вагонов в движении | 1983 |
|
SU1078256A1 |

