Изобретение относится к весоизмерительной технике и может использоваться в народном хозяйстве для взвешивания железнодорожного подвижного состава в движении и статике.
Известен способ, реализованный в вагонных весах 7260S/1+1 фирмы МЕТЛЕР ТОЛЕДО, предназначенных для статического взвешивания сцепленных и расцепленных вагонов и цистерн, по которому вагоны устанавливают на грузоприемную платформу, состоящую из двух блоков со вставкой, если геометрические размеры вагонов позволяют их установку, после чего производят взвешивание (1).
Недостаток известных весов состоит в том, что на их платформу умещается незначительное число типов вагонов, находящихся в обращении, что делает его устройством ограниченного применения.
Известен также способ, принятый за прототип и реализованный в весах «ВЕСТА-СД» фирмы АСИ, по которому производят на различных типоразмерах весовых платформ повагонное взвешивание с расцепкой и без расцепки в статике: 4-, 6- и 8-осных вагонов или повагонное взвешивание в движении тех же вагонов (2).
Прототип не свободен от недостатков.
Поскольку железнодорожные объекты весьма разнообразны по геометрии (длина, размеры по сцепке, базы, типы тележек и др.), понятно, что на любых конкретных весах - без применения специальных приемов - можно взвесить только часть объектов. Это значительное неудобство для производственников, которым приходится устанавливать несколько типов весов или использовать весы заведомо больших размеров. Так и фирма АСИ предлагает несколько типоразмеров весов «ВЕСТА-СД» для различных типов вагонов, а режим взвешивания в движении ограниченного применения и не может быть использован для выбранных вагонов во взвешиваемом составе, как часто требуется.
Задачей предлагаемого изобретения является создание универсального способа взвешивания железнодорожных объектов, совмещающего достоинства статического и динамического способов.
Технический результат достигается за счет того, что размеры весовых платформ и вставки подбираются так, чтобы при проезде разных типов объектов комбинации наездов и выездов однозначно определяли, какая тележка проехала и когда ее можно корректно взвесить. Кроме того, имеется возможность перейти со взвешивания в движении на статическое взвешивание.
Существенность технического решения заключается в том, что при способе взвешивания железнодорожных объектов в статике и движении, включающем их перемещение по весам, состоящим из двух весовых платформ со вставкой, измерение быстродействующим АЦП кодов нагрузок, определение выездов и наездов осей, фиксацию состояний «весы свободны» (ВС), при проезде объектов составляют уникальные комбинации наездов (Н) и выездов (В), на выбранных комбинациях взвешивают тележки, при совпадении времени взвешивания для 1-й и 2-й тележек объекта производят повагонное взвешивание, при несовпадении - потележечное взвешивание, о начале возможности повагонного взвешивания подают сигнал на остановку состава для проведения взвешивания в статике, при этом измерение в статике прекращают по команде компьютера «конец измерения» (КИ), формируемой по достижении заданного числа упомянутых кодов, а в движении - по первому наезду или выезду оси после начала измерения. Кроме того, локомотив из состава идентифицируют по отношению продолжительностей проезда по платформе первой оси и двух осей вместе
На фиг.1 изображены кинематические схемы объектов, которыми оперирует способ, фиг.2 показывает в масштабе соотношение размеров весов и объектов, фиг.3 дает блок-схему весов, реализующих способ, фиг.4, 5, 6 поясняют действие способа.
Сделаем пояснения к фиг.1. Специалисты РЖД употребляют термин «база вагона», понимая под этим расстояние между серединами тележек объектов, как это обозначено на фиг.2. Поскольку в последнее время наиболее употребительным направлением в конструировании вагонных весов стали двухплатформенные весы (и в этом есть свой резон - ведь все взвешиваемые объекты двухтележечные!), для нас более удобно различать у объекта два параметра: «база +», соответствующая расстоянию между наиболее удаленными внешними осями объекта, и «база -» - просвет между крайними внутренними осями первой и второй тележек, как это показано на фиг.1.
На магистральных и внутренних путях РФ обращаются пять типов железнодорожных объектов (фиг.1). Это двухосная (позиция 2), трехосная (позиция 3) и четырехосная (позиция 4) тележки соответственно четырехосного, шестиосного и восьмиосного вагонов, а также трехосные (позиция Л-3) и двухосные (позиция Л-2) тележки шестиосного и четырехосного локомотивов, которые необходимо в большинстве случаев распознать и исключить из числа взвешиваемых объектов.
Существенным различием между вагонами и локомотивами являются размеры тележек. У четырехосных вагонов (поз.2 фиг.1) оно составляет Мт2=1,85 метра, у трехосной тележки Мт3=3,5 метра, у четырехосной тележки Мт4=5,05 метра, причем расстояние между двумя двухосными тележками четырехосной тележки А=1,35 метра. У двухосного локомотива (Л-2) Мтл=2,1 метра, а у трехосного Мтл*2=4,2 метра. Эти размеры имеют важное значение для понимания работы способа.
На фиг.2 в масштабе показано расположение двухплатформенных весов и взвешиваемых объектов. Размеры весовых платформ 1 и вставки 2 выбраны для конкретности по 4,5 метра из соображений возможности взвешивания в статике наибольшего количества объектов и минимизации размеров весов. При указанных размерах по параметру «база-» нельзя взвесить только объекты №20-480 (4-осный хоппер) и №22-4024 (8-осный полувагон для руды). Но по параметру «база +» не проходят около 50 объектов (а проходит 200 типов). Чтобы взвесить все типы нужно более чем вдвое увеличить размеры и стоимость весов, т.к. некоторые объекты имеют параметр «база +» до 22 метров.
В железнодорожном составе вагоны соединены сцепками, причем в районе сцепки обычно нет просвета, достаточного для того, чтобы весовая платформа 1 выбранной длины 4,5 метра обнулилась (сформировался сигнал ВС - весы свободны). В то же время в середине объектов такой сигнал ВС формируются всегда, за исключением двух упомянутых в предыдущем абзаце объектов №20-480 и 22-4024.
Основная идея способа заключается в том, чтобы, обеспечив выбором размеров весов возможность взвешивания максимального количества объектов в статике, объекты, не проходящие по параметрам «база +» и «база -», а также все 6-осные и 8-осные объекты взвесить в движении потележечно и достичь, таким образом, 100% провески любого подаваемого состава.
На фиг.3 представлен один из вариантов реализации предлагаемого способа - весы, состоящие из двух весовых платформ 1 и вставки 2, причем весовые платформы 1 вмонтированы в рельсовый путь 3 со шпалами 4. Весовые платформы 1 опираются на тензодатчики 5 и основание 6.
Тензодатчики 5 (например, типа WBK фирмы CAS) через преобразователи 7 аналог-код (например, SLX200 фирмы DATAFORTH Corporation, США) поданы на вход персонального компьютера 8, имеющего выход на сигнализатор 9 (звонок или фонарь).
На фиг.4 показаны уникальные комбинации наездов и выездов осей при проезде по весовой платформе 1 для 2-осной тележки Н-Н-В-В, для 3-осной тележки Н-Н-Н-В-В-В, для 4-осной тележки Н-Н-Н-В-Н-В-В-В. Это справедливо для длины весовой платформы 1 длиной от 3,5 до 5 метров, если нет мешающих осей, например, если тележка идет в составе первой.
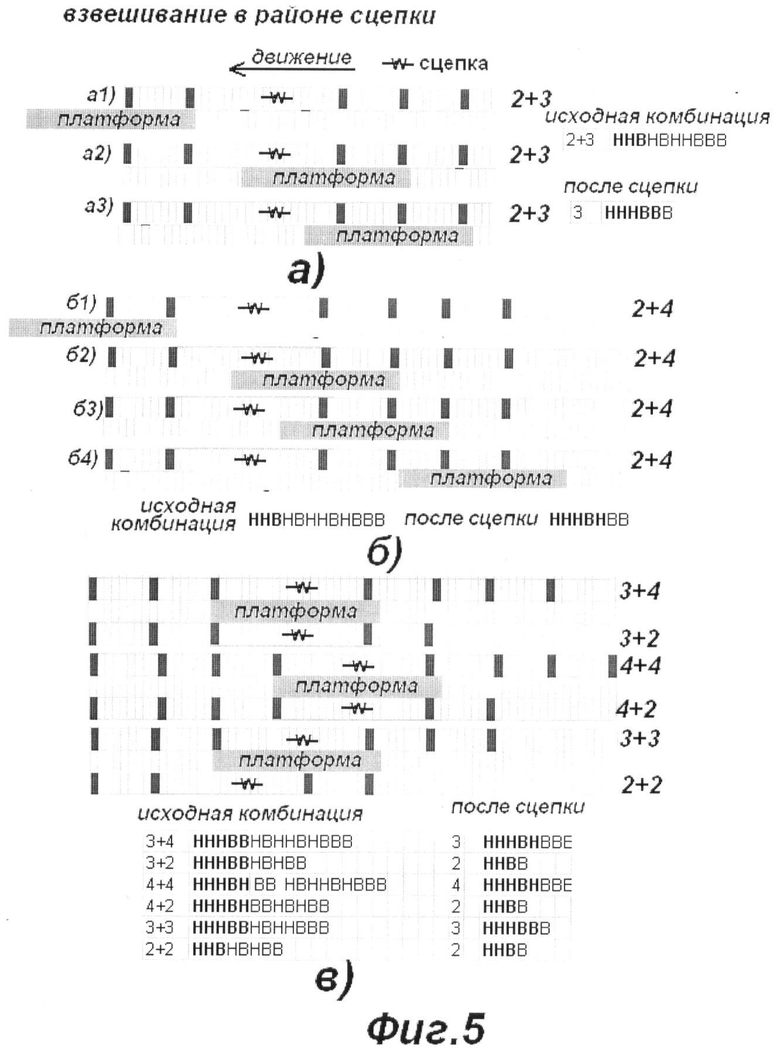
Фиг.5 представляет в масштабе все возможные варианты расположения тележек в районе сцепки, когда крайние оси соседних вагонов разнесены на расстояние около 4 метров. Позиция а): в сцепке 2-осной и 3-осной тележек исходная кодовая комбинация наездов и выездов двухосной и трехосной тележек ННВНВННВВВ. Поскольку двухосная тележка вторая в четырехосном вагоне, ее осность была определена при взвешивании первой тележки. Позиция а1) показывает момент, когда на весовую платформу 1 въехала двухосная тележка, которая взвешивается все время, пока на платформе 1 находятся две оси. Позиция а2) показывает момент, когда на весовую платформу 1 въехало две оси первой тележки второго вагона. Сколько осей у второго вагона неизвестно, поэтому производится взвешивание двух осей. Результат Р2о запоминается. Далее на платформу 1 - позиция а3) - наезжает третья ось. Производится взвешивание трех осей, результат Р3о запоминается. При дальнейшем движении состава по весам 1-я тележка въезжает в межтележечное пространство 6-осного вагона, т.е. последует три выезда подряд. Комбинация НННВВ является признаком трехосной тележки, поэтому в компьютере запоминается осность «3» для взвешивания второй тележки, погашается результат Р2о, а результат Р3о принимается за вес первой тележки шестиосного вагона.
Несколько иначе взвешивается связка с четырехосной тележкой (позиция б). Здесь на позиции б1) показано взвешивание второй тележки четырехосного вагона, а на позиции б2) взвешиваются две первых оси, результат Р2о запоминается. Далее согласно позиции б3) взвешиваются три оси, результат Р3о запоминается. При дальнейшем движении состава по весам происходят выезд и наезд. Комбинация НННВН является признаком четырехосной тележки, поэтому в компьютере запоминается осность «4» для взвешивания второй тележки, погашается результат Р3о, а результат Р2о принимается за вес первой двухосной тележки восьмиосного вагона. На позиции б4) показано взвешивание второй двухосной тележки восьмиосного вагона. Результат Р2о+суммируется с полученным ранее результатом Р2о, образуя вес четырехосной тележки Р4о=Р2о+Р2о+. Остальные связки из позиции 5в) взвешиваются подобным же образом без каких-либо особенностей.
Покажем теперь по фиг.6, выполненной в масштабе, как работает способ. Пусть на двухплатформенные весы справа наезжает состав из 4-осного и 6-осного объектов. Позиция 6а) показывает взвешивание 1-й тележки 4-осного объекта, результат Рт1,2 (здесь и далее - 1-я цифра № тележки, 2-я - № весовой платформы) запоминают. Далее по позиции 6б) взвешивают тележку 2, результат Рт2,2 запоминают.
Позиция 6в) интересна тем, что обе тележки объекта - первая и вторая - находятся на весах, компьютер 8 формирует для машиниста через сигнализатор 9 сигнал о возможности остановиться и произвести взвешивание в статике. При взвешивании в статике получается вес всего вагона Рвс=Рт1,1с + Рт2,2 с. При взвешивании в движении будут получены результаты Рт1,1 и Рт2,2.
Независимо от того, будет ли произведена остановка (которая производится в сегодняшней практике по свистку весовщика), точность взвешивания и в статике будет высокой. Большая часть погрешности (порядка 1%) при взвешивании в движении, когда обычно несколько осей объекта находится на весах, а несколько на рельсовом пути, имеет причиной перераспределение усилий между осями тележки через пружины подвески.
При дальнейшем продвижении состава 2-я тележка 4-осного объекта будет взвешена еще раз с результатом Рт2,1. В итоге при взвешивании в динамике результат Рвд=(Рт1,2+Рт2,2+Рт1,1+Рт2,1)/2.
Позиции 6г), 6д), 6е) и 6ж) показывают, что 1-я и 2-я тележки 6-осного объекта будут взвешены по два раза каждая. Взвесить данный шестиосный объект в статике на данных весах не представляется возможным, т.к. объект больше габаритов весов.
Результат взвешивания 6-осного объекта будет подсчитан компьютером 8 по формуле: Рвд=(Рт1,2+Рт2,2+Рт1,1+Рт2,1)/2.
Соответственно, каждая тележка восьмиосного объекта будет взвешена за восемь приемов - четыре двухосных тележки каждая дважды.
Исключение локомотива из числа взвешиваемых объектов, если это требуется, производится следующим образом. Межосевое расстояние вагонов 1850 мм, а локомотива 2100 мм. Поэтому при длине весовой платформы 1, равной 4500 мм, длина участка весов, по которой проезжают две оси тележки, для вагона равна 4500-1850·2=800 мм, а для локомотива 4500-2100·2=300 мм.
Соответственно, отношение времен проезда одной и двух осей для вагона равно 2,3, а для локомотива - 7. Поэтому алгоритм исключения простой: при наезде объекта после состояния ВС («весы свободны») на весовую платформу 1 число дискрет, получаемых преобразователем 7 при проезде одной оси, необходимо разделить на число дискрет при проезде двух осей, и при значении частного более заданного (например, 5) исключить объект из числа взвешиваемых.
Взвешивание «коротких» объектов №20-480 (4-осный хоппер) и №22-4024 (8-осный полувагон для руды), не имеющих необходимого просвета, чтобы в межтележечном пространстве сформировался сигнал ВС «весы свободны», производится следующим образом.
Как показано на фиг.5в при взвешивании в сцепке двух двухосных тележек (2+2) образуется комбинация ННВНВНВВ, такая же как и при проезде «короткого» хоппера №20-480. По наступлении двух подряд наездов НН производим взвешивание, комбинация ННВ - признак двухосной тележки. После выезда двух осей от первоначальной комбинации остается ННВВ, опять наезд двух осей подряд - взвешивание второй тележки и подсчет двух выездов, после чего взвешивание по вышеописанной методике той тележки, что следует дальше. Совершенно также осуществляется взвешивание «короткого» 8-осного полувагона №22-4024.
Как понятно из фиг.2, некоторые объекты имеют размеры «база-» и «база+» настолько близкие к просвету между платформами 1 или к максимальному размеру весов, что остановка объектов для статического взвешивания затруднительна или возможна в ручном режиме после ряда попыток. Ряд объектов для металлургических технологий с размером «база -» 4650 мм (например, №23-4090) только по 75 мм на сторону превышают просвет между платформами 1 весов. Остановить такие объекты на весах с первого раза едва ли возможно. Есть подобные объекты и с «базами +».
С учетом вышесказанного способ взвешивания железнодорожных объектов в составе работает следующим образом. При наезде первой тележки состава на первую по ходу платформу 1 ей присваивается №2, а следующей - №1 (фиг.3). Соответственно, когда первая тележка будет находиться на первой платформе 1, а вторая тележка - на второй платформе 1, можно производить взвешивание в статике или повагонное взвешивание в движении. Большинство шестиосных и восьмиосных объектов, обращающихся на дорогах РФ, не помещаются на предлагаемых весах размером 4500·3=13500 мм. Поэтому, если при проезде первой же тележки получают признак шести- или восьмиосного объекта, применяют потележечное взвешивание, т.е. каждая тележка взвешивается дважды, а за результат принимается полусумма. К особенностям способа относится то, что идентификация и измерение осуществляются по двум отдельным каналам для каждой весовой платформы 1, а результаты суммирует персональный компьютер 8. Двухосные тележки также взвешиваются в движении, результаты сохраняются и, если объект «длинный», т.е. не входит на весы, за результат также принимается полусумма четырех измерений. Если объект помещается на весы, то в момент времени, когда обе тележки находятся на весах (см. позицию в) на фиг.6), компьютер 8 выдает команду на сигнализатор 9, оповещая машиниста о возможности остановиться и произвести взвешивание в статике. При этом процедура потележечного взвешивания не прекращается и, если остановки не будет или если на статическое или повагонное в движении взвешивание будет мало времени, результат будет зафиксирован по потележечному принципу. Одновременно с сигналом запускается процедура повагонного взвешивания. В случае статики команду «Конец измерения» формирует персональный компьютер 8 по набору заданного числа кодов (например, 1024) преобразователей 7. Результат измерения в этом случае получают суммированием 1024 кодов с отбрасыванием трех последних десятичных цифр суммы. Число кодов, принятых от преобразователей 7 при повагонном взвешивании в движении, может быть и меньшим, если выезд или наезд какой-то оси произошел ранее набора заданного числа кодов. Результат измерения при этом вычисляется по известному алгоритму с применением приемов цифровой фильтрации. Если число кодов, принятых от преобразователей 7, меньше некоторого наперед заданного числа (например, 50), за результат принимаются данные потележечного взвешивания. Таким образом, результат будет получен всегда, в том числе в случае несостоявшейся остановки объекта.
Источники информации
1. http://www.mtrus.com/
2. http://www.isasi.ru/modules.php?name=Wagon&go=vestasd




Изобретение относится к весоизмерительной технике и может использоваться для взвешивания железнодорожных объектов в статике и движении. Способ заключается в перемещении объектов по весам, состоящим из двух весовых платформ со вставкой. При этом производится измерение быстродействующим АЦП кодов нагрузок, определение выездов и наездов осей, фиксация состояний «весы свободны» ВС, причем при проезде объектов составляют характерные комбинации наездов Н и выездов В. На выбранных комбинациях взвешивают тележки, при совпадении времени взвешивания для 1-й и 2-й тележек вагона производят повагонное взвешивание, при несовпадении - потележечное взвешивание. Измерение в статике прекращают по команде компьютера «Конец измерения», а в движении - по первому наезду или выезду после начала измерения. Технический результат заключается в возможности взвешивания различных типов ж/д объектов в статике и движении с близкими погрешностями в обоих случаях. 1 з.п. ф-лы, 6 ил.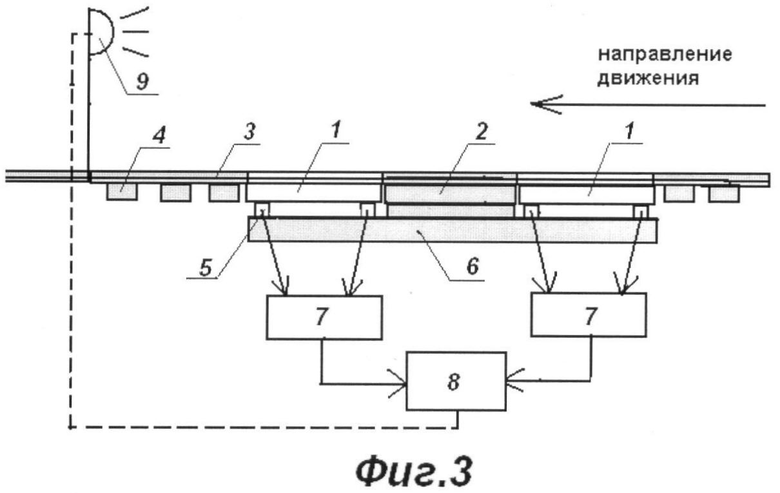
1. Способ взвешивания железнодорожных объектов в статике и движении, включающий их перемещение по весам, состоящим из двух весовых платформ со вставкой, измерение быстродействующим АЦП кодов нагрузок, определение выездов и наездов осей, фиксацию состояний «весы свободны» (ВС), отличающийся тем, что при проезде объектов составляют уникальные комбинации наездов (Н) и выездов (В), на выбранных комбинациях взвешивают тележки, при совпадении времени взвешивания для 1-й и 2-й тележек объекта производят повагонное взвешивание, при несовпадении - потележечное взвешивание, о начале возможности повагонного взвешивания подают сигнал на остановку состава для проведения взвешивания в статике, при этом измерение в статике прекращают по команде компьютера «конец измерения» (КИ), формируемой по достижению заданного числа упомянутых кодов, а в движении - по первому наезду или выезду оси после начала измерения.
2. Способ по п.1, отличающийся тем, что локомотив из состава идентифицируют по отношению продолжительностей проезда по платформе первой оси и двух осей вместе.
| СПОСОБ ПОЭЛЕМЕНТНОГО ВЗВЕШИВАНИЯ ЖЕЛЕЗНОДОРОЖНЫХ ОБЪЕКТОВ | 2002 |
|
RU2239799C2 |
| Способ поосного взвешивания железнодорожных вагонов в движении | 1989 |
|
SU1749719A1 |
| Устройство для взвешивания железнодорожного подвижного состава | 1984 |
|
SU1234728A1 |

