Предлагаемое изобретение относится к оптическому приборостроению, в частности к зеркальным и зеркально-линзовым телескопам космического базирования при решении задач высокоточного измерения взаимного углового положения между нормалями к плоским зеркальным поверхностям, привязанным к соответствующим механическим базам.
Во многих прикладных задачах требуемая точность измерения азимутального угла между нормалями к плоским зеркальным поверхностям составляет величины менее десяти угловых секунд. Есть широкий класс приборов, обеспечивающих измерение углов разворота вокруг оптической (визирной) оси, так называемых углов скручивания - С.П. Буюкян. «Видеоизмерительные системы». М.: МИИГАиК, 2008. [1].
Существуют два традиционных способа решения задачи измерения угла скручивания. Первый способ решает задачу методами геометрической оптики. Этот метод ставит результирующую точность измерения в зависимость от размеров оптических баз, т.е. в конечном итоге от размеров устройств. Кроме того, существуют серьезные проблемы в получении высокой точности при наличии смещений и наклонов контрольных баз. У геометрических схем лучшие результаты соответствуют погрешности измерения угла скручивания ±15ʺ при полном измерении угла ±1,5°.
Второй способ решения задачи измерения угла скручивания основан на методах физической оптики, а именно на применении поляризованного излучения.
Известно устройство вертикального переноса направления (УВПН) - О.Л. Олендский, М.Н. Сокольский, В.П. Трегуб. «Поляризационный канал переноса азимутального направления по вертикали». «Оптический журнал», №76, октябрь 2009 г. [2].
Поляризационный УВПН состоит из излучателя, поляризатора, модулятора Фарадея, анализатора и приемника. Излучатель обеспечивает световой луч нужной интенсивности, поляризатор делает этот луч плоскополяризованным. Модулятор обеспечивает раскачку плоскости поляризации по гармоническому закону без постоянной составляющей по углу. Анализатор преобразует модуляцию плоскости поляризации по углу в амплитудную модуляцию интенсивности светового потока. Фотоприемник преобразует модулированный световой поток в электрический сигнал, который проходит узкополосную фильтрацию с целью выделить сигнал с частотой модуляции. При нулевом угле скручивания поляризатора относительно анализатора электрический сигнал равен нулю. Таким образом, данная схема выполняет роль ноль-датчика в составе следящей системы, в которой привод разворачивает поляризатор относительно анализатора.
УВПН [2] обеспечивает точность передачи азимутального направления не хуже ±3ʺ, причем точность самого поляризационного канала в составе прибора не хуже ±2ʺ, а также позволяет передавать азимутальное направление по вертикали до 3-х метров при смещениях нижней контрольной базы относительно верхней в поперечном направлении до ±40 мм.
Также аналогами могут служить автоколлиматоры унифицированные АКУ-0,2; АКУ-0,5; АКУ-1 (0,2; 0,5; 1 - цена деления секундной шкалы), предназначенные для визуального измерения углов и непрямолинейности направляющих, для определения взаимного углового расположения осей и плоскостей в пространстве, а также используются в качестве нуля-индикатора.
Автоколлиматоры имеют двухкоординатную окулярную головку, что позволяет одновременно производить измерения в двух плоскостях без дополнительной настройки. Автоколлиматоры АКУ-0,2 и АКУ-0,5 применяются для проведения измерений в лабораториях цехов прецизионного производства. Автоколлиматор АКУ-1 применяется для проведения измерений на рабочих местах в цехах машиностроительных предприятий.
Главным недостатком как УВПН, так и автоколлиматоров является отсутствие возможности трехмерного измерения. То есть, в первом случае мы получаем только один угол разворота, а во втором - 2, но ни один из приведенных аналогов не дает полной картины - трех углов измерения.
Наиболее близким по своей технической сущности к предлагаемому изобретению является система контроля деформации крупногабаритных платформ, представленная в статье «Стабилизация космической платформы с помощью трех автоколлиматоров», изв. ВУЗов, Приборостроение, 2014, т. 57, №7, стр. 69-75 [3].
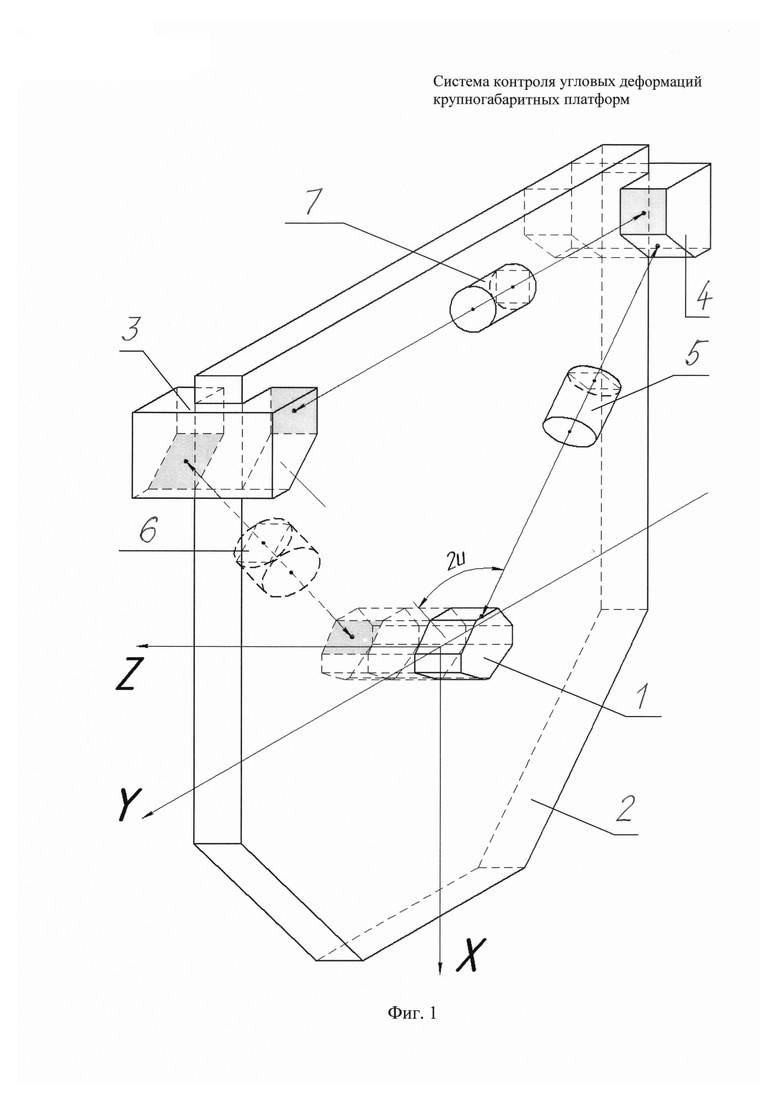
Изначально система контроля угловых деформаций крупногабаритных платформ (Фиг. 1) представляет собой платформу 1 с закрепленными на ней базовым контрольным элементом (БКЭ) 2 и контрольными элементами (КЭ) 3, 4. БКЭ 2 и КЭ 3, КЭ 4 представляют собой призмы с аттестованными между собой зеркальными гранями и расположены так, что нормали к их граням составляют между собой треугольник. На каждой стороне образованного треугольника расположены три двухкоординатных автоколлиматора (АК) 5, 6, 7, каждый из которых выдает по два угла разворота граней КЭ 3 и КЭ 4, между которыми он расположен, друг относительно друга.
БКЭ 2 считается неподвижным, и все отклонения измеряются относительно него, поэтому при измерениях автоколлиматорами АК 5 и АК 7 не возникает никаких неопределенностей, в то время как при измерении автоколлиматором АК 6 угла разворота КЭ 3 и КЭ 4 вокруг оси х возникает неопределенность, т.е. автоколлиматор АК 6 не может определить, какой из контрольных элементов КЭ 3 или КЭ 4 развернулся, в результате чего система становится двухмерной.
Для того чтобы система контроля угловых деформаций крупногабаритных платформ стала трехмерной, эту задачу решают в прототипе двумя способами:
1) один из контрольных элементов КЭ 3 или КЭ 4 должен иметь два, заведомо известных положения в пространстве, для чего в систему контроля угловых деформаций крупногабаритных платформ вводится механизм поворота контрольного элемента, что в значительной степени снижает точность контроля угловых деформаций и усложняет всю систему контроля в целом.
2) на один из контрольных элементов КЭ 3 или КЭ 4 наклеивают небольшой зеркальный клин с аттестованным углом при вершине. Это приводит к необходимости дополнительного конструктивного решения, поскольку появляется необходимость обработки одновременно двух измерительных марок на приемнике автоколлиматора АК 6, что снижает поле зрения автоколлиматора, как минимум в 2 раза, поскольку под каждую измерительную марку необходимо будет отвести свою зону на приемнике автоколлиматора АК 5 во избежание взаимного перекрытия марок.
Задачей предлагаемого изобретения является улучшение характеристик системы контроля угловых деформаций крупногабаритных платформ по точности измерений, упрощение конструкции и алгоритма обработки информации.
Для решения поставленной задачи предлагается система контроля угловых деформаций крупногабаритных платформ, которая, как и прототип, содержит крупногабаритную платформу с закрепленными на ней базовым контрольным элементом и двумя контрольными элементами, представляющими собой призмы с аттестованными между собой зеркальными гранями и размещенными в вершинах треугольника, образованного нормалями к граням контрольных элементов, причем на каждой стороне треугольника расположено по одному двухкоординатному автоколлиматору.
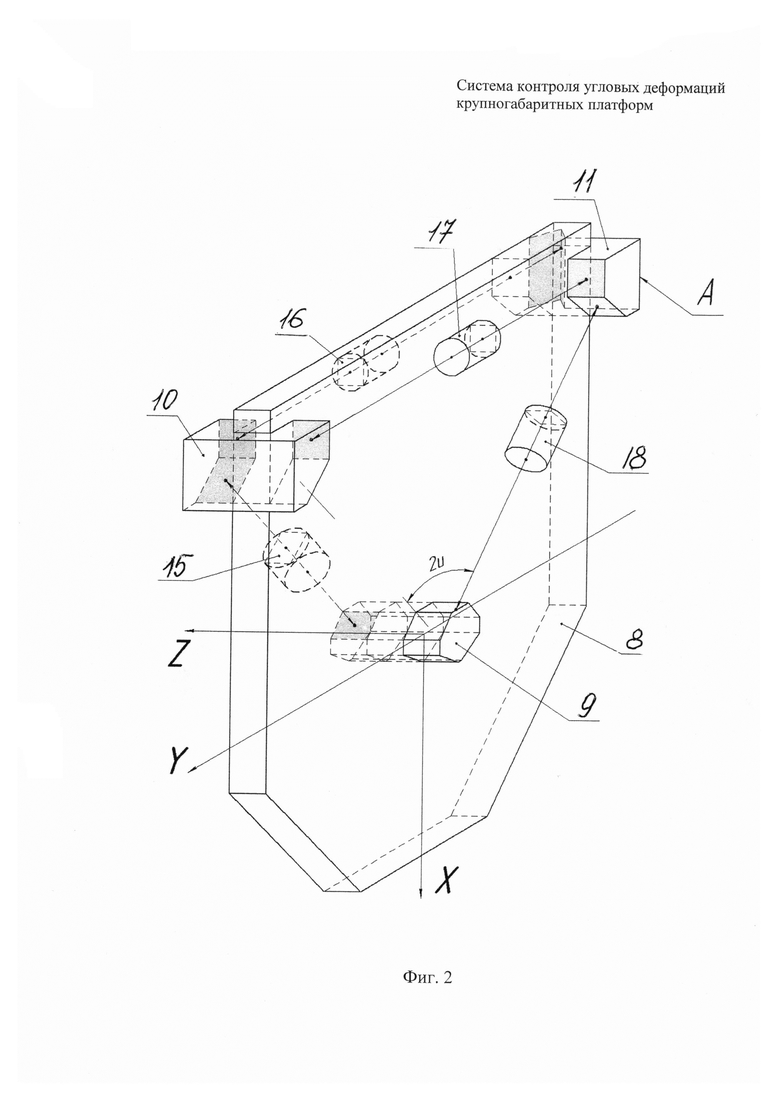
В отличие от прототипа в систему контроля угловых деформаций крупногабаритных платформ дополнительно включен двухкоординатный автоколлиматор, размещенный между двумя контрольными элементами с другой стороны платформы, кроме того, один из контрольных элементов выполнен в форме призмы с крышей.
Сущность изобретения заключается в том, что дополнительный двухкоординатный автоколлиматор, благодаря крыше, расположенной на одной из граней контрольного элемента, не чувствует разворота грани призмы вокруг оси х, то есть он выдает значение разворота второго контрольного элемента вокруг оси х относительно базового контрольного элемента. Таким образом, устраняется неопределенность во взаимном положении контрольных элементов, и система может контролировать угловые деформации крупногабаритной платформы вокруг трех координатных осей.
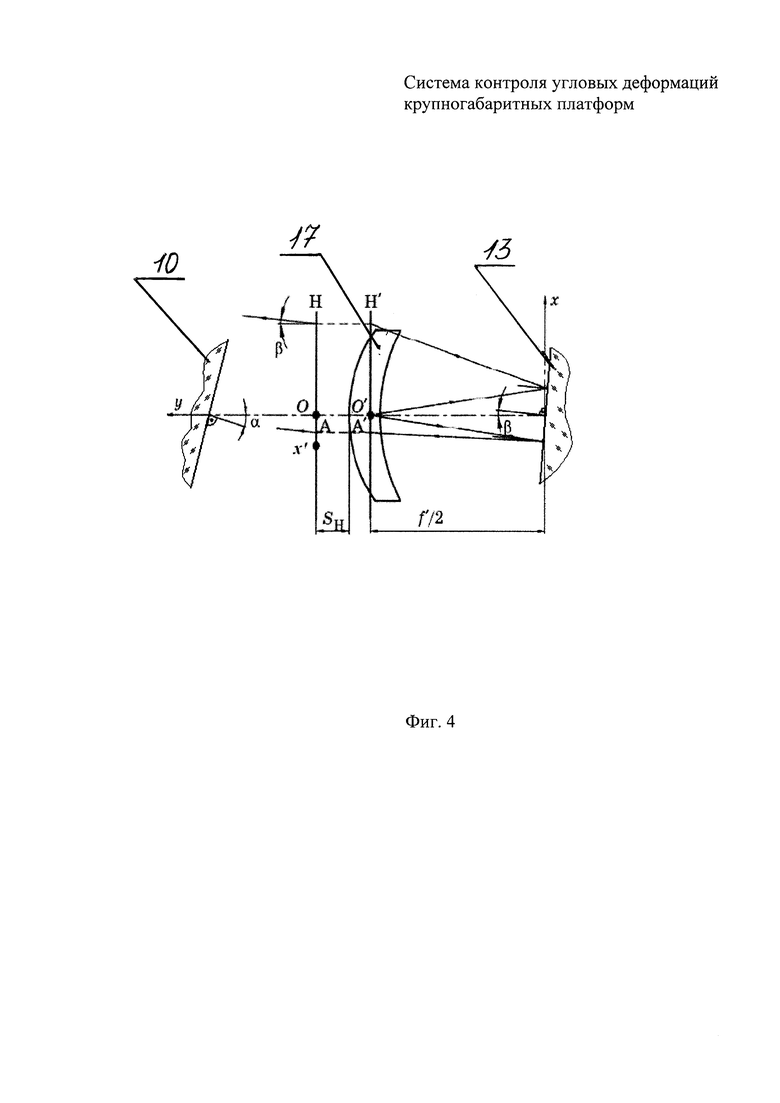
Сущность предложенного технического решения поясняется чертежами: фиг. 1 - прототип системы контроля угловых деформаций крупногабаритных платформ, фиг. 2 - предлагаемая система контроля угловых деформаций крупногабаритных платформ, фиг. 3 - контрольный элемент системы контроля угловых деформаций крупногабаритных платформ, фиг. 4 - оптическая схема работы системы.
Система контроля угловых деформаций крупногабаритной платформы (Фиг. 2) содержит платформу 8 с закрепленными на ней базовым контрольным элементом (БКЭ) 9, контрольными элементами (КЭ) 10 и 11. БКЭ 9, КЭ 10 представляют собой призмы с аттестованными между собой зеркальными гранями. КЭ 11 (Фиг. 3) представляет собой призму с крышей 12 с частично зеркальными аттестованными между собой гранями 13, смонтированную на оправе 14. БКЭ 9, КЭ 10 и КЭ 11 расположены так, что нормали к их граням составляют между собой треугольник. На каждой стороне образованного треугольника расположены двухкоординатные автоколлиматоры (АК) 15, 16, 17 и 18.
Система контроля угловых деформаций крупногабаритной платформы работает следующим образом.
Каждый АК 15, 16, 17, 18 состоит из объектива с вынесенной передней главной плоскостью Н (Фиг. 4), в исходном состоянии во внешней системе координат xy оптическая ось объектива совпадает с осью y. Точка О - главная точка объектива, совпадающая с его узловой точкой. Измерительная марка А совмещается с точкой О. Марка А с увеличением +1 изображается в заднюю главную точку О'. На расстоянии 0,5f', где f - заднее фокусное расстояние объектива, устанавливается зеркальная грань 13 КЭ 11. Параллельный пучок лучей, вышедших из объектива АК 17, отражается от зеркальной грани КЭ 10 и в обратном ходе образует в плоскости Н автоколлимационное изображение марки А. Если зеркальная грань 13 КЭ 11 наклонена относительно оси y на угол β, то из объектива выходит параллельный пучок лучей также под углом β относительно оси y. Если зеркальная грань КЭ 10 наклонена на угол α относительно оптической оси объектива, то изображение марки А смещается в точку с координатой х' в плоскости Н, при этом

Такая оптическая система делает АК нерасстраиваемыми, так как малые смещения объектива АК 17 в плоскости, перпендикулярной оси y, а также малые наклоны объектива не приводят к смещению автоколлимационного изображения марки А, то есть к изменению значения координаты х' и, соответственно, не приводят к изменению контролируемой разности (α-β).
По величине смещения изображения измерительной марки относительно центра ФПУ можно судить о величине деформаций платформы.
Рассмотрим работу системы на примере угловой деформации платформы, вызвавшей разворот КЭ 10 вокруг всех трех осей x, y и z, тогда:
С АК 17, по смещению измерительной марки мы получим данные о взаимном развороте КЭ 10 и КЭ 11 вокруг осей х и z, но не сможем определить, какой из контрольных элементов развернулся.
С АК 16, по смещению измерительной марки мы получим данные о развороте КЭ 11 вокруг оси х и взаимном развороте КЭ 10 и КЭ 11 вокруг оси z, но не сможем определить, какой из контрольных элементов развернулся вокруг оси z.
С АК 15, по смещению измерительной марки мы получим данные о развороте КЭ 10 вокруг осей y и z.
С АК 18, по смещению измерительной марки мы получим данные о развороте КЭ 11 вокруг осей y и z (исходя из данного примера, полученные данные будут равны 0, поскольку развернулся только КЭ 10).
По величине смещения изображения измерительной марки относительно центра ФПУ можно судить о величине угловых деформаций платформы.
Таким образом, предлагаемое изобретение решает поставленную задачу - упрощение конструкции без введения дополнительного механизма поворота, упрощение алгоритма обработки информации, а также улучшение характеристик системы контроля угловых деформаций крупногабаритных платформ по точности измерений, без уменьшения поля зрения автоколлиматора.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство определения астрономического азимута | 2023 |
|
RU2800187C1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОЙ ОРИЕНТАЦИИ ОБЪЕКТОВ | 2009 |
|
RU2408840C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПЕРЕМЕЩЕНИЙ ИЗОБРАЖЕНИЯ МАРКИ В ЦИФРОВЫХ АВТОКОЛЛИМАТОРАХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2021 |
|
RU2773278C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВ ПОВОРОТА ОБЪЕКТА И ДВУХКООРДИНАТНЫЙ АВТОКОЛЛИМАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2024 |
|
RU2828450C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОГРЕШНОСТИ УГЛОМЕРНОГО ПОВОРОТНОГО СТОЛА | 2021 |
|
RU2779239C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ОТКЛОНЕНИЙ ОТ ПЛОСКОСТНОСТИ ПОВЕРХНОСТИ | 2004 |
|
RU2287776C2 |
| Способ измерения углов,образуемых тремя гранями призмы,и устройство для его осуществления | 1985 |
|
SU1250848A1 |
| СПОСОБ КАЛИБРОВКИ ОПТИКО-ЭЛЕКТРОННОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2635336C2 |
| ДАТЧИК УГЛА ПОВОРОТА | 2017 |
|
RU2644994C1 |
| ТРЁХКООРДИНАТНЫЙ ФОТОЭЛЕКТРИЧЕСКИЙ АВТОКОЛЛИМАТОР | 2017 |
|
RU2650432C1 |

Система контроля угловых деформаций крупногабаритных платформ содержит крупногабаритную платформу, с закрепленными на ней базовым контрольным элементом и двумя контрольными элементами, представляющими собой призмы с аттестованными между собой зеркальными гранями и размещенными в вершинах треугольника, образованного нормалями к граням контрольных элементов. На каждой стороне треугольника расположено по одному двухкоординатному автоколлиматору. Дополнительно в систему контроля угловых деформаций крупногабаритных платформ включен двухкоординатный автоколлиматор, размещенный между двумя контрольными элементами с другой стороны платформы. Технический результат заключается в повышении точности системы контроля угловых деформаций крупногабаритных платформ, упрощение ее конструкции и алгоритма обработки информации. 4 ил.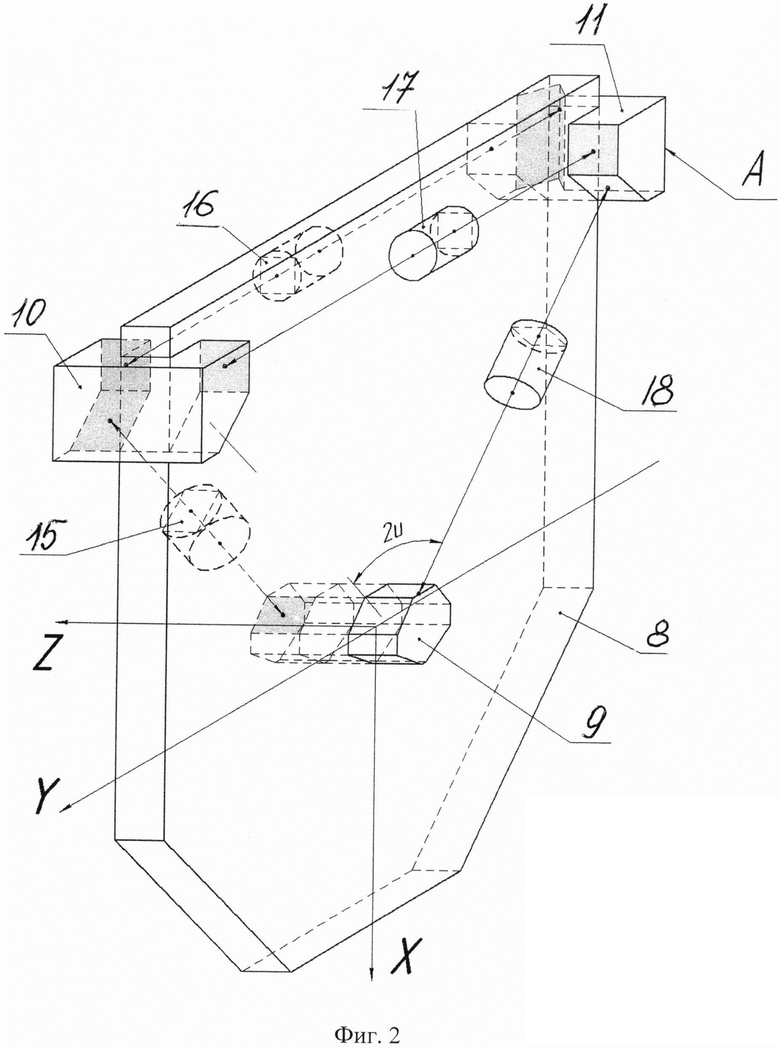
Система контроля деформаций крупногабаритных платформ, содержащая крупногабаритную платформу с закрепленными на ней базовым контрольным элементом и двумя контрольными элементами, представляющими собой призмы с аттестованными между собой зеркальными гранями и размещенными в вершинах треугольника, образованного нормалями к граням контрольных элементов, причем на каждой стороне треугольника расположено по одному двухкоординатному автоколлиматору, отличающаяся тем, что в систему контроля деформаций крупногабаритных платформ дополнительно включен двухкоординатный автоколлиматор, размещенный между двумя контрольными элементами с другой стороны платформы, кроме того, один из контрольных элементов выполнен в форме призмы с крышей.
| Устройство для бесконтактного измерения деформаций | 1980 |
|
SU1101672A1 |
| Лазерный интерферометр для измерения динамических деформаций | 1984 |
|
SU1270555A1 |
| СПОСОБ АРТРОДЕЗА ПРИ ДЕСТРУКТИВНЫХ ПОРАЖЕНИЯХ ГОЛЕНОСТОПНОГО СУСТАВА | 2009 |
|
RU2392892C1 |
| JP H 09126737 A, 16.05.1997. | |||

