2.Привод по п. 1, отличающийся тем, что полость, образованная первым и вторым поясками второго золотника, соединена с источником рабочей жидкости через проточку первого золотника, последняя выполнена с положительным перекрытием ее третьим пояском первого золотника, а полость, образованная вторым и третьим поясками второго золотника, соединена со сливом и камерой гидродвигателя через полость, образованную вторым и третьим поясками первого золотника.
3.Привод по п. 1, отличающийся тем, что, с целью расширения, диапазона применения, он снабжен дополнительным гидродвигателем с рабочими камерами, а первый золотник - четвертым пояском, выполненным равным по диаметру его третьему пояску и расположенным между последним и пружиной, и дополнительной проточкой, выполненной с положительным перекрытием ее четвертым пояском и связанной с одной из камер дополнительного гидродвигателя, при этом проточна первого золотника, подключенная к источнику рабочей жидкости, размещена между его третьим и четвертым поясками, а полость, образованная вторым и третьим поясками второго золотника, связана с другой камерой дополнительного гидродвигателя.

| название | год | авторы | номер документа |
|---|---|---|---|
| ОГРАНИЧИТЕЛЬ МОЩНОСТИ ЭЛЕКТРОГИДРАВЛИЧЕСКОГО СЛЕДЯЩЕГО ПРИВОДА | 2006 |
|
RU2309302C1 |
| РЕДУКЦИОННЫЙ КЛАПАН | 2006 |
|
RU2312265C1 |
| ГИДРОУСИЛИТЕЛЬ | 2006 |
|
RU2307960C1 |
| Гидравлический следящий привод | 1982 |
|
SU1019117A1 |
| Гидравлическое распределительное устройство | 1981 |
|
SU1064054A1 |
| Гидравлический привод | 1988 |
|
SU1606748A1 |
| Устройство для управления гидравлическим двигателем | 1982 |
|
SU1030587A2 |
| Регулятор расхода жидкости | 1982 |
|
SU1113784A1 |
| Способ управления гидродвигателем и устройство для его осуществления | 1980 |
|
SU922340A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 2006 |
|
RU2311567C1 |

1. ГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИй ПРИВОД, содержащий гидродвигатель регулируемой скорости с рабочими камерами, гидравлическое следящее устройство, связанное с источником рабочей жидкости, сливом и с гидродвигателем через двухпозиционное распределительное устройство, имеющее два ступенчатых, золотника, первый поясок каждого из которых выполнен большего диаметра, чем подпружиненный второй поясок, причем пружинные полости золотников соединены между собой, торцовая полость первого золотника, образованная в гильзе его первым пояском, соединена со следящим устройством и пружинной полостью второго золотника, торцовая полость которого, образованная в гильзе его первым пояском, соединена с полостью, образованной первым и вторым поясками первого золотника и связанной со сливом, отличающийся тем, что, с целью повышения точности слежения и надежности- в работе, первый золотник снабжен тре-, тьим пояском, выполненным равньш по д-иаметру его второму пояску и расположенным между последним и пружиной, а гильза первого золотника выполнена с проточкой, подключенной к источнику рабочей жидкости, второй золотник снабжен третьим по:яском, выполненным равным по диаметру его первому пояску и расположенным между последним и вторым пояском, полость, образованная первым и третьим поясками вто(Л рого золотника, соединена с одной из камер гидродвигателя и с источником рабочей жидкости, а полость, образованная вторым и третьим поясками второго золотника, соединена со сливом и другой камерой гидродвигателя.
Изобретение относится к гидроавтоматике и может быть использовано в гидросистемах копировальных станков и автоматов. Известен гидравлический следящий привод, содержащий гидродвигатель регулируемой скорости с рабочими камерами, гидравлическое следящее устройство, связанное с источником рабочей жидкости, сливом и с гидродвигателем через распределительное у&тройство, имеющее два подпружиненных золотника с полостями, образованными их поясками в гильзах, и связанными между собой, а также с источником рабочей жидкости и сливом 1. Недостатком известного привода является ограниченность скорости и -сложность конструкции распределительного устройства. Известен также гидравлический следящий привод, содержащий гидродвигатель регулируемой скорости с рабочими камерами, гидравлическое следящее устройство, связанное с источником рабочей жидкости, сливом и гидродвигателем через двухпозиционное распределительное устройство, имеющее два ступенчатых золотника, первый поясок каждого из которых выполнен большего диаметра, чем подпружиненный второй поясок, причем пружинные полости золотников соединены между собой, торцовая полость первого золотника, образованная в гильзе его первым пояском, соединена со следящим устройством и пружинной полостью второго золотника, торцовая полость которого, образованная в гильзе его первым пояском, соединена с полостью, образованной первым и вторым поясками первого золотника и связанной со сливом 2. Недостатками известного привода являются низкие точность и надежность, а также узость диапазона применения из-за большой величины зоны переключения распределительного устройства. Целью изобретения является повышение точности и надежности работы и, кроме того, расширение диапазона применения. Указанная цель достигается тем, что в гидравлическом следящем приводе, содержащем гидродвигатель регулируемой скорости с рабочими камерами, гидравлическое следящее устройство, связанное с источником рабочей жидкости, сливом и гидродвигателем через двухпозиционное распределительное устройство, имеющее два ступенчатых золотника, первый поясок каждого из которых выполнен большего диаметра, чем подпружиненный второй поясок, причем пружинные полости золотников соединены между собой, торцовая полость первого золотника, образованная в гильзе его первым пояском, соединена со следящим устройством и пружинной полостью второго золотника, торцовая полость которого, образованная в гильзе его первым пояском, соединена с полостью, образованной первым и вторым поясками первого золотника и связанной со сливом, первый золотник снабжен третьим пояском, выполненным равным по диаметру его второму пояску и расположенным между последним и пружиной, а гильза первого золотника выполнена с проточкой, подключенной к источнику рабочей жидкости, второй золотник снабжен третьим пояском, выполненным равным по диаметру его первому пояску и расположенным между последним и вторым пояском, полость, образованная первым и третьим поясками второго золотника, соединена с одной камер гидродвигателя и с источником рабочей жидкости, а полость, образованная вторым и третьим поясками второго золотника, соединена со сливом и другой камерой гидродвигателя. Кроме того, полость, образованная первым и вторым поясками второго золотника, соединена с источником рабочей жидкости через проточку первого золотника, последняя выполнена с положительным перекрытием ее третьим пояском первого золотника, а полость, образованная вторым и третьим поясками второго золотника, соединена со сливом и камерой гидродвигателя через полость, образованную вторым и третьим поясками первого золотника.
При этом привод снабжен дополнительным гидродвигателем с рабочими камерами, а первый золотник - четвертым пояском, выполненным равным по диаметру его третьему пояску и расположенному между последним и пружиной, и дополнительной проточкой, выполненной с положительным перекрытием ее четвертым пояском и связанной с одной из камер дополнительного гидродвигателя, при этом проточка первого золотника, подключенная к источнику рабочей жидкости, размещена между его третьим и четвертым поясками, а полость, образованная вторым и третьим поясками второго золотника, связана с другой камерой дополнительного гидродвигателя.
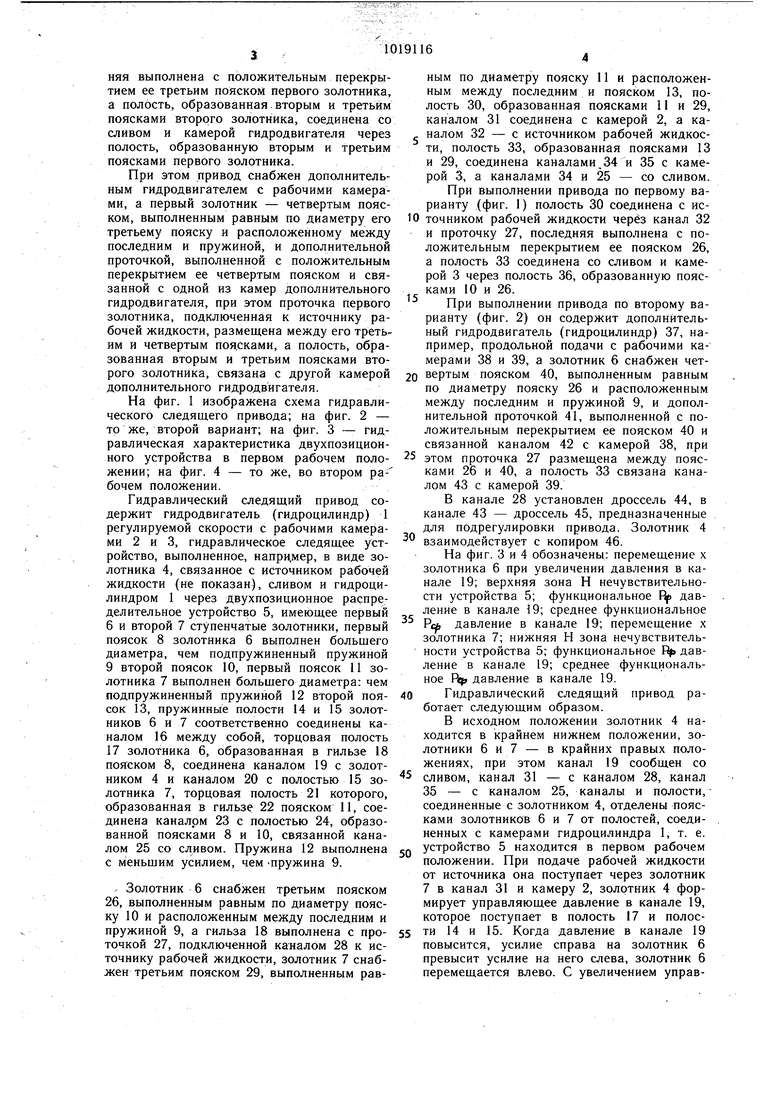
На фиг. 1 изображена схема гидравлического следящего привода; на фиг. 2 - то же, второй вариант; на фиг. 3 - гидравлическая характеристика двухпозиционного устройства в первом рабочем положении; на фиг. 4 - то же, во втором рабочем положении.
Гидравлический следящий привод содержит гидродвигатель (гидроцилиндр) 1 регулируемой скорости с рабочими камерами 2 и 3, гидравлическое следящее устройство, выполненное, например, в виде золотника 4, связанное с источником рабочей жидкости (не показан), сливом и гидроцилиндром 1 через двухпозиционное распределительное устройство 5, имеющее первый 6 и второй 7 ступенчатые золотники, первый поясок 8 золотника 6 выполнен больщего диаметра, чем подпружиненный пружиной 9 второй поясок 10, первый поясок 11 золотника 7 выполнен большего диаметра: чем подпружиненный пружиной 12 второй поясок 13, пружинные полости 14 и 15 золотников 6 и 7 соответственно соединены каналом 16 между собой, торцовая полость 17 золотника 6, образованная в гильзе 18 пояском 8, соединена каналом 19 с золотником 4 и каналом 20 с полостью 15 золотника 7, торцовая полость 21 которого, образованная в гильзе 22 пояском 11, соединена каналом 23 с полостью 24, образованной поясками 8 и 10, связанной каналом 25 со сливом. Пружина 12 выполнена с меньщим усилием, чем Пружина 9.
. Золотник 6 снабжен третьим пояском 26, выполненным равным по диаметру пояску 10 и расположенным между последним и пружиной 9, а гильза 18 выполнена с проточкой 27, подключенной каналом 28 к источнику рабочей жидкости, золотник 7 снабжен третьим пояском 29, выполненным равным по диаметру пояску 11 и расположенным между последним и пояском 13, полость 30, образованная поясками 11 и 29, каналом 31 соединена с камерой 2, а каналом 32 - с источником рабочей жидкости, полость 33, образованная поясками 13 и 29, соединена каналами 34 и 35 с камерой 3, а каналами 34 и 25 - со сливом. При выполнении привода по первому варианту (фиг. 1) полость 30 соединена с источником рабочей жидкости через канал 32 и проточку 27, последняя выполнена с положительным перекрытием ее пояском 26, а полость 33 соединена со сливом и камерой 3 через полость 36, образованную поясками 10 и 26.
При выполнении привода по второму варианту (фиг. 2) он содержит дополнительный гидродвигатель (гидроцилиндр) 37, например, продольной подачи с рабочими камерами 38 и 39, а золотник 6 снабжен четвертым пояском 40, выполненным равным по диаметру пояску 26 и расположенным между последним и пружиной 9, и дополнительной проточкой 41, выполненной с положительным перекрытием ее пояском 40 и связанной каналом 42 с камерой 38, при
5 этом проточка 27 размещена между поясками 26 и 40, а полость 33 связана каналом 43 с камерой 39.
В канале 28 установлен дроссель 44, в канале 43 - дроссель 45, предназначенные для подрегулировки привода. Золотник 4
взаимодействует с копиром 46.
На фиг. 3 и 4 обозначены: перемещение х золотника 6 при увеличении давления в канале 19; верхняя зона Н нечувствительности устройства 5; функциональное F давление в канале 19; среднее функциональное
РСЬ давление в канале 19; перемещение х золотника 7; нижняя Н зона нечувствительности устройства 5; функциональное Rj давление в канале 19; среднее функциональное Rfj, давление в канале 19.
0 Гидравлический следящий привод работает следующим образом.
В исходном положении золотник 4 находится в крайнем нижнем положении, золотники 6 и 7 - в крайних правых положениях, при этом канал 19 сообщен со
сливом, канал 31 - с каналом 28, канал 35 - с каналом 25, каналы и полости,соединенные с золотником 4, отделены поясками золотников 6 и 7 от полостей, соединенных с камерами гидроцилиндра 1, т. е.
„ устройство 5 находится в первом рабочем положении. При подаче рабочей жидкости от источника она поступает через золотник 7 в канал 31 и камеру 2, золотник 4 формирует управляющее давление в канале 19, которое поступает в полость 17 и полости 14 и 15. Когда давление в канале 19 повысится, усилие справа на золотник 6 превысит усилие на него слева, золотник 6 перемещается влево. С увеличением управляющего давления и хода золотника 6 увеличивается дросселирование (сопротивление) потока рабочей жидкости из канала 35 на слив.
На участке копира 46, перпендикулярном направлению подачи гидроцилиндра 1, управляющее давление повышается до верхней зоны нечувствительности (фиг. 3), золотник 6 перемещается до осевого -среднего положения, канал 35 запирается, гидроцилиндр 1 останавливается.
Если затем профиль копира 46 понижается, золотник 4 смещается вниз, управляющее давление в канале 19 понижается, усилие слева на золотник 6 становится больще, чем усилие справа, золотник 6 смещается вправо до положения равновесия, открывая проход рабочей жидкости из канала 35 на слив, а гидроцилиндр 1 перемещается со скоростью, соответствующей наклону копира 46,
При переходе на повышающийся участок копира 46, золотник 4 поднимается до положения, при котором управляющее давление поднимается выше давления зоны нечувствительности, золотник 6 перемещается влево, полость 24 соединяется с полостью 17 и полостью 21, и золотник 7 перемещается в крайнее левое положение, поскольку пружина 12 выполнена слабее пружины 9, а полость 15 соединяется со сливом, давление в полости 14 также падает, и золотник 6 перемещается в крайнее левое положение, тем самым двухпозиционное устройство 5 переключается во второе рабочее положение и осуществляется реверс гидроцилиндра 1, при этом канал 31 соединяется со сливом , а канал 35 - с источником рабочей жидкости.
Работа устройства 5 осуществляется далее по характеристике изобра Кенной на фиг. 4, при этом с уменьшением управляющего давления и, следовательно, смещения золотника 7 увеличивается дросселирование потока рабочей жидкости, поступающего на слив из полости 30. В результате начинается движение гидроцилиндра 1 в обратном направлении, золотник 4 после реверса устанавливается в промежуточное положение, управляющее давление в канале 19 уменьщается, и золотник 7 перемещается вправо до положения равновесия, а гидроцилиндр 1 перемещается со скоростью, соответствующей наклону профиля копира 46.
При переходе на участок копира 46, перперпендикулярном подаче гидроцилнндра
1, золотник 4 смещается вниз, управляющее давление понижается до нижней зоны нечувствительности (фиг. 4), золотник 7 перемещается вправо в промежуточное положение, перекрывая канал 31, и гидроцилиндр 1 останавливается. При переходе копира 46 вновь на повышающийся участок, золотник 7 несколько смещается вправо, открывая канал 31, и гидроцилиндр 1 продолжает движение со скоростью, соответствующей наклону профиля копира 46.
Далее при новом переходе копира 46 на понижающийся участок, управляюще1е давление падает ниже нижней зоны нечувствительности золотника 7 и 6 перемещаются в крайнее правое положение, полости 21 и 24 соединяются со сливом и, следовательно, двухпозиционное устройство 5 возвращается в первое рабочее положение.
Далее при каждом переходе с понижающегося участка копира 46 на повышающийся и наоборот устройство 5 переключается из одного рабочего положения в другое, а между переключениями осуществляют слежение гидроцилиндра 1 за скоростью и положением копира 46, причем, как видно из описания работы устройства 5, связи полости 21 с полостью. 24, а также полости 14 с полостью 15 являются положительными обратными связями между золотниками 6 и 7, действие этих связей направлено на повыщекие точности и надежности привода При выполнении привода по второму варианту, изображенному на фиг. 2, в первом рабочем положении устройства 5, последнее с помощью полости 36, проточки 41 и поясков 26 и 40 осуществляет управление скоростью продольной подачи гидроцилиндра 37 в обратно пропорциональной зависимости от скорости гидроцилиндра 1, работа которого происходит аналогично описанному выше. Во втором рабочем положении устройства 5 оно также осуществляет управление скоростью подачи гидроцилиндра 37 с помощью полостей 30, 33 и пояска 29.
Таким образом, благодаря осуществлению двухкомпонентного движения расширяется диапазон применения привода, например, в области станкостроения.
Использование изобретения в гидросистемах копировальных станков и автоматов позволит повысить их точность и на;дежность а также расщирить диапазон применения и тем самым повысить эффективность их использования.
39
38
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Сосонкин В | |||
| Л | |||
| Дискретная гидроавтоматика | |||
| М., «Машиностроение, 1972, с | |||
| Способ окисления боковых цепей ароматических углеводородов и их производных в кислоты и альдегиды | 1921 |
|
SU58A1 |
| Видоизменение прибора с двумя приемами для рассматривания проекционные увеличенных и удаленных от зрителя стереограмм | 1919 |
|
SU28A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Авторское, свидетельство СССР № 306292, кл | |||
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| Водоотводчик | 1925 |
|
SU1962A1 |
