QO
rpaHcnopriibiM средствам сельскохозяйственного назкаченип к ма1И и1но-трактор1:Ч М агрегатам.
Известно транспортное средство сельскохозяйственного назначе Н1я, содержащее энергетическук) тележку и iiia) связанную с ней посредством cucnHoio у;-т)ойства с гидрощ-ктппдрами н датчиком разности давлений технологическую тележку, снабженную устройством разде:1ьпого управления си.повыми приводами ведупщх колес и навесными уст)ойствами для присоединения сельскохозяйственных орудий I.
Данное транснортное с)едетво имеет недостаточную стаби;1ьнос1Т) нрямо.чипейпого движения.
Наиболее б..тизким по технической сущностн к нредлагае.мому яч.чяется )тное сред.ство се.1вскохозяйств(пно1о назначения, содержащее электрические двнгатели привода колес, соединенные с регуляторами тока возбуждения, я блок формирования сигнала ynpaBJiennsi, связапн1ий с входом регу.чятора тока В(;збуждения одного борта транспортного средства непосредствен
но, а с входом регулятора д) борта
посредство.м инвертора 2| Недостаток известней )
чтгюпства - узкий ре1улнрован я крутян,его МОтяговых :1..тектроMeirra и часто1ч,: вранхсния
двигате.лей Hpii нрав;|ени
n.ii с ПОМОН1ЫО
нос.ледова1елы1ой обмс)ткг
возбу.жденпя и
инерционность отработки 1р111 одами иравого 1 левого ведущих ко.пес 1-ехнологической тележки касательных ci;;: ,:ii;; тя1и д.чя созДания HOBOp;i4HBaioui,ero : омспта,, из-за чего комненсация BHeiiii-icix; разворачиваю цея с заго момента осУ1иест 5ляет
Г1аздьп5анг;ем.
Цель изобретения pacHiHjiCiiHe диапазона и повьинепие оперативности )вапия новорачиваюн|,его 1омента гг)анспортного средства.
Поставленная не.И: .тосппас-тси тем, что транснортное средство сел ьск{.хозяй ет венного назначения снабжено рс.с.ляторами напряжения и блоками расн|.)еде;1е11ия сигналов управления по бopтa i транспортного средства, один из Bi ixo;u)B каждо1Ч1 ii3 которых евязап с уп)ав,лякици ; входом регулятора напряжеп;.1я, а второй с управляющим входом регулятора тока возбсждения, причем один из блоков растределсния сигна.юв уп|)ав:1ен11я соединен с б.юком формирования сигнала у 1равления через инвертор.
Каждый б.кж р.аспределения сигналов управления имеет ()орсируюи1ее звено, соединенное с выходом Гхтока, связанно1Ч.) с регулятором напряжения, пропорциональное звено и инвертирующее звено, соединяющее пропор.ионалы5ое звено е выходом блока, связанного с регуляторо.м тока возбуждення, тричем входы форсирующего и пропорционального звеньев соединены с входом блока.
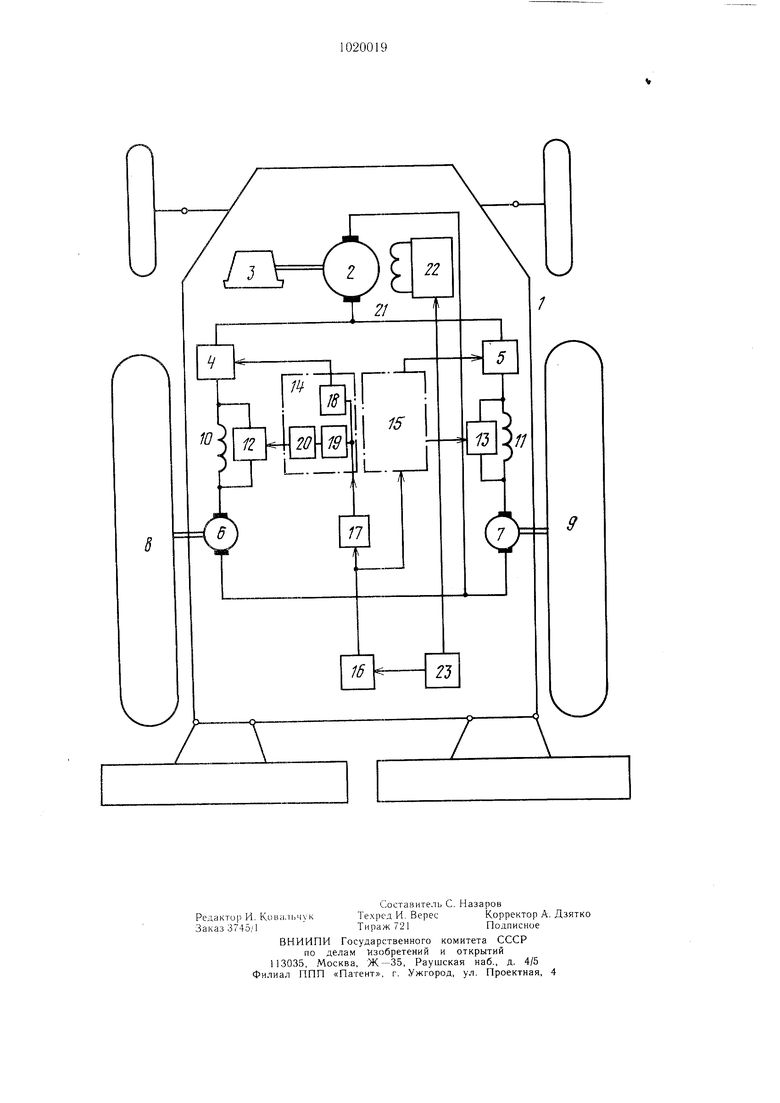
На чертеже изображена схема транспортного средетва.
Транснортное средство 1 оборудовано тяговым генератором 2, нриводи.мым тепловым двигателем 3 и питающим посредством регуляторов 4 и 5 напряжения тяговые электродвигатели б и 7, соединенные с колесами
0 8 и 9 соответственно левого и правого борта транспортного средства. Электродвигатели б и 7 имеют обмотки 10 и 11 возбуждения паралле;1ьно которым подсоединены регуляторы 12 и 13 тока возбуждения. Управляющие входы регуляторов 4, 12 и 5, 13 соеS динены посредством блоков 14 и 15 распределения сигналов управления с блоком 16 формирования сигнала управления, причем вход блока 15 распределения сигналов управления соединен с выходом блока 16 неносредственно, а блок 14 - посредством, инвертора 17,
Блок 14 распределения сигналов управления содержит форсирующ,ее звено 18, соединяющее вход блока 14 с первым его выходом, и пропорциональное звено 19, соединяющее вход блока 14 с его вторым выходом посредством инвертирующего звена 20 С первым выходом блока 14 соединен управляющий вход регулятора 4 напряжения э.1ектродвигателя 6,, а с вторым - управляющий вход регулятора 12 тока возбуждения,
0 регулирующего ток в обмотке 10 возбуждения электродвигателя 6. Структура блока 15 распределения сигналов управления аналогична структуре блока 14.
Об.мотка 21 возбуждения тягового генератора 2 соединена с регулятором 22, свя.5 запным с системой 23 автоматического ре1ллирования, которая связана с блоком 16 формирования сигнала управления.
Транспортное средство работает следующим образом.
0При движении тепловой двигатель 3 транспортного средства 1 приводит тяговый генератор 2, напряжение которого, регулируемое системой авто.матического регулирования 23, приложен к электродвигателям 6 и 7 посредством индивидуальных ре уляторов нанряжения 4 и 5, имеющих некоторую начальную уставку регулирования, вследствие чего напряжение на электродвигателях 6 и 7 несколько меньше напря жения генератора 2, Электродвигатели 6
Q и 7 развивают одинаковые (или приблизительно одинаковые вследствие неизбежного разброса характеристик) крутящие моменты, а связанные с ними колеса 8 и 9 - приблизительно одинаковые касательные тяги. Их совместное действие создает результирую5 тую силу тяги, приложенную к транспортному средству в направлении его движения, При этом сигнал управления на выходе блока 16 формирования сигнала управления отсутствует и, соответственно, отсутствуют сигналы на управляющих входах регуляторов 4 и 5 напряжения и регуляторов 12 и 13 тока возбуждения. Последние так же, как и регуляторы 4 и 5 напряжения, имеют начальную уставку и создают некоторое снижение тока в обмотках 10 и 11 возбуждения по сравнению с токами якорей электродвигателей 6 и 7 и, следовательно, некоторое начальное ослабление поля тяговых электродвигателей 6 и 7. При появлении внещнего разворачивающего момента вследствие отклонения линии действия равнодействующей сил сопротивления орудий от оси симметрии устройства -1 г блок 16 формирования сигнала управления формирует на своем выходе сигнал управления, пропорциональный этому разворачивающему моменту (знак его зависит от направления момента). Пройдя через инвер,-,, тор 17, сигнал изменяет знак и на входы бло1Л изменяет ,, ,,-ков 14 и 15 поступают сигналы одинаковой поступают величины, но разного знака. Блоки 14 и 15 распределения сигнала управления распределяют эти сигналы между двумя своими выходами, причем одна часть их поступает на входы регуляторов 4 и 5 напряжения, а другая часть, пройдя через инвертор и изменив знак, на входы регуляторов 12 и 13 тока возбуждения. Если, например, разворачивающий момент действует на устройство по часовой стрелке, то сигналы на выходе регуляторов 4, 5, 12 и 13 будут такими, что регулятор 4 напряжения начнет уменьщать напряжение на электродвигателе 6, снижая его ток, а регулятор 12 тока возбуждения будет увеличивать ток в его обмотке 10 возбуждения, усугубляя уменьщение якорного тока. Вследствие этого крутящий момент на валу электродвигателя 6 снизится. Соответственно снизится касательная сила тяги на колесе 8; Поскольку знаки сигналов на входе регуляторов 4 и 12, связанных с электродвигателем 6, противоположны знакам сигналов на входе регуляторов 5 и 13, связанных с электродвигателем 7, регулятор 5 напряжения начнет увеличивать напряжение а регулятор 13 тока возбуждения - уменьщать ток в обмотке 11 возбуждения электродвигателя 7. Ток последнего будет увеличиваться, как и крутящий момент на его валу и касательная сила тяги на связанном с ним колесе9. Разность касательных сил тяги колес 9 и 8, действуя на плече, равном колее транспортного средства 1, создает поворачивающий момент в горизонтальной плоскости, действующий против часовой стрелки, т. е. противоположно разворачивающему моменту сил сопротивления ору дий, что приведет к стабилизации прямолинейного движения средства 1. Силы сопротивления создающие разворачивающий момент, являются следствием многих факторов и имеют случайный характер. Величина их меняется во времени также случайным образом; однако известно, что они содержат низко- и высокочастотные составляющие. Эти же составляющие содержит и сигнал управления на выходе блока 16. Блоки 14 и 15 распределения сигналов управления распределяют сигналы управления между регуляторами напряжения и тока возбуждения таким образом, что для низкочастотной составляющей сигнала управления большая доля его поступает на управляющие входы регуляторов 12 и 13 тока JlTlIWillnC DvVWADi ptl VilTlJUjJUD I j П 1 О L l ГЧ d возбуждения, что определяется соотнощением коэффициентов передачи звеньев 18 и 19, высокочастотной составляющей большая доля поступает на управляющие входы регуляторов 4 и 5 напряжения вследствие i fj, прохождения сигнала через форсирующее gи ч и .у В результате этого быстроменяющиеся возмущения ликвидируются посредством воздействия в основном на напряжение питания электродвигателей тягового привода, а устойчивые медленноменяющиеся возмущения - посредством воздействия в основном на магнитные потоки электродвигателей, что благоприятно сказывается на протекании переходного процесса регулирования, Если нужно выполнить разворот транспортного средства 1, например влево, блок 16 формирования сигнала управления формирует по команде водителя сигнал того же знака, что и в описанном выще случае. Сигнал этот распределяется блоками 14 и 15 по регуляторам 4, 5, 12 и 13 и вызывает их , ., .. реакцию, аналогичную реакции при отработке поворачивающего момента, что приводит к появлению такого же по направлению поворачивающего мо.мента, причем при резком повороте вначале изменяется напряжение на электродвигателях, а затем происходит взаимное изменение поля электродвигателей за счет изменения их токов возбуждения, в то время как величины напряжения возвращаются почти к первоначальным значениям, задаваемым системой 23 автоматического регулирования, Одновременное и согласованное регулирование как напряжения, так и тока возбуждения электродвигателей тягового привода транспортного средства 1 относительно величин, задаваемых основной системой автоматического регулирования 23, расширяет диапазон регулирования крутящего момента электродвигателей и, следовательно, увеличивает максимальное значение поворачивающего момента машинно-тракторного агрегата в процессе стабилизации прямолинейного движения и на развороте.
| название | год | авторы | номер документа |
|---|---|---|---|
| Транспортное средство сельскохозяйственного назначения | 1981 |
|
SU1001880A1 |
| Транспортное средство сельскохозяйственного назначения | 1977 |
|
SU682169A1 |
| Способ управления поворотом транспортного средства | 1981 |
|
SU1020277A1 |
| Электрическая передача переменного тока тягового транспортного средства с микропроцессорной системой управления | 2019 |
|
RU2729767C1 |
| Система управления положением транспортного механизма | 1985 |
|
SU1386955A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРИЧЕСКИМ ПОДВИЖНЫМ СОСТАВОМ | 2000 |
|
RU2179515C2 |
| СПОСОБ УПРАВЛЕНИЯ МОМЕНТОМ ЭЛЕКТРОДВИГАТЕЛЕЙ ПЕРЕМЕННОГО ТОКА ФОРМИРОВАНИЕМ В ЭЛЕКТРОПРИВОДЕ ЧАСТОТНО-РЕГУЛИРУЕМОГО СИГНАЛА И УСТРОЙСТВО, РЕАЛИЗУЮЩЕЕ ЭТОТ СПОСОБ | 2010 |
|
RU2458805C1 |
| Способ регулирования электрической тяговой передачи тепловоза | 2020 |
|
RU2735305C1 |
| Система автоматического управления | 1985 |
|
SU1409964A1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЭЛЕКТРИЧЕСКОЙ ТЯГОВОЙ ПЕРЕДАЧИ ГИБРИДНОГО МАНЕВРОВОГО ТЕПЛОВОЗА | 2012 |
|
RU2511253C1 |
1. ТРАНСПОРТНОЕ СРЕДСТВО СЕЛЬСКОХОЗЯЙСТВЕННОГО НАЗНАЧЕНИЯ, содержащее электрические двигатели привода колес, соединенные с регуляторами тока возбуждения, и блок формирования сигнала управления, связанный с входом регулятора тока возбуждения одного борта транспортного средства непосредственно, а с входом регулятора другого борта посредством инвертора, отличающееся тем, что, с целью расширения диапазона и повышения оперативности регулирования поворачиваюш,его момента транспортного средства, оно снабжено регуляторами напряжения и блоками распределения сигналов управления по бортам транспортного средства, один из выходов каждого из которых связан с управляющим входом регулятора напряжения, а второй - с управляющим входом регулятора тока возбуждения, причем один из блоков распределения сигналов управления соединен с блоком формирования сигнала управления через инвертор. 2. Транспортное средство по п. 1, отличающееся тем, что каждый блок распределения сигналов управления имеет форсирующее звено, соединенное с выходом блока, связанного с регулятором напря жения, пропорциональное звено и инвер(Л тирующее звено, соединяющее пропорциональное звено с выходом блока, связанного с регулятором тока возбуждения, причем входы форсирующего и пропорционального звеньев соединены с входом блока.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Транспортное средство сельскохозяйственного назначения | 1974 |
|
SU523654A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Транспортное средство сельскохозяйственного назначения | 1977 |
|
SU682169A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
