Изобретение относится к сельскохозяйственному машиностроению, в частности к транспортным средствам сельскохозяйственного назначения.
Известно устройство для автоматического вождения тракторного агрегата на склонах, включающее датчики положения трактора и сельскохозяйственной машины, подключенные к блоку управления механизма поворота трактора и блоку управления механизма поворота сельскохозяйственной машины .
Наиболее близким к предлагаемому является транспортное средство сельскохозяйственного назначения, содержаш;ее энергетическую тележку и шарнирно связанную с ней посредством сцепного устройства с гидроцилиндрами и датчиком разности давлений технологическую тележку, снабженную устройством раздельного управления силовыми приводами ведущих колес и навесными устройствами для присоединения сельскохозяйственных орудий 2.
Известные транспортные средства имеют недостаточную стабильность прямолинейного движения.
Цель изобретения - повышение стабильности прямолинейного движения.
Это достигается тем, что транспортное средство снабжено силоизмерительными
датчиками, укрепленными на навесных устройствах, блоком формирования сигнала разворачивающего момента, сумматором, инвертором и блоками нелинейности, причем входы сумматора связаны с блоком формирования сигнала разворачивающего момента и датчиком разности давлений, а выход - с устройством управления силовым приводом одного из ведущих колес
технологической тележки посредством блока нелинейности и с устройством управления силовым приводом другого ведущего колеса технологической тележки посредством инвертора и блока нелинейности.
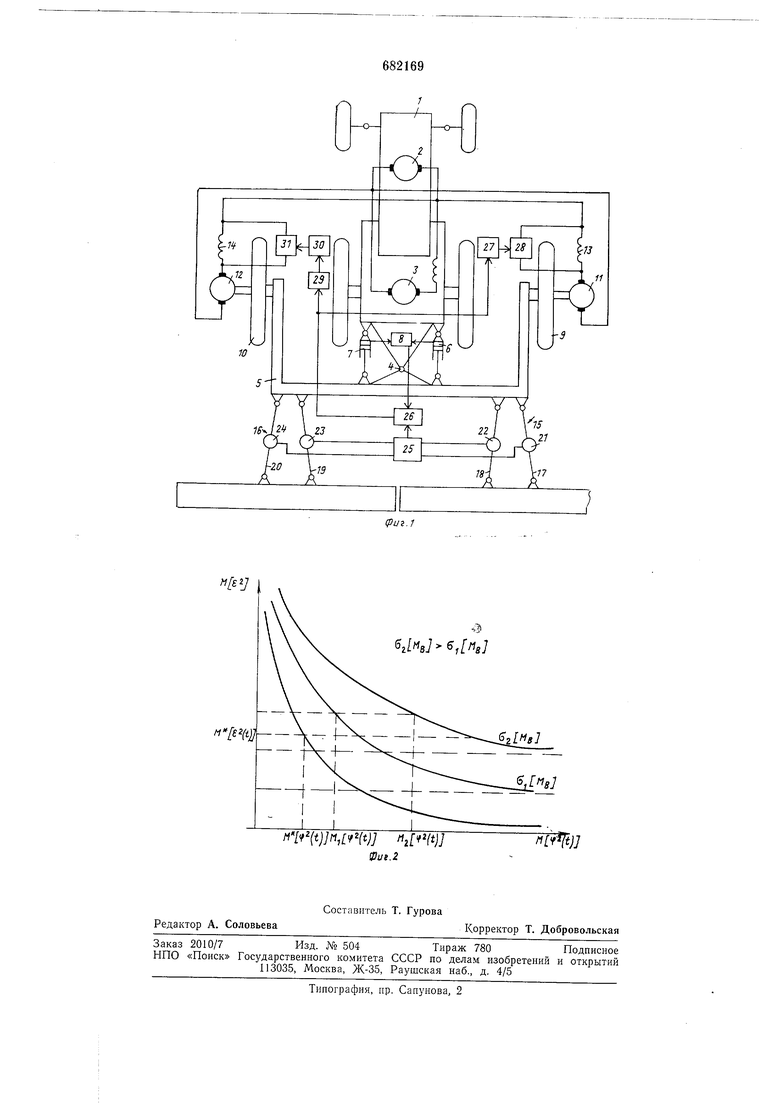
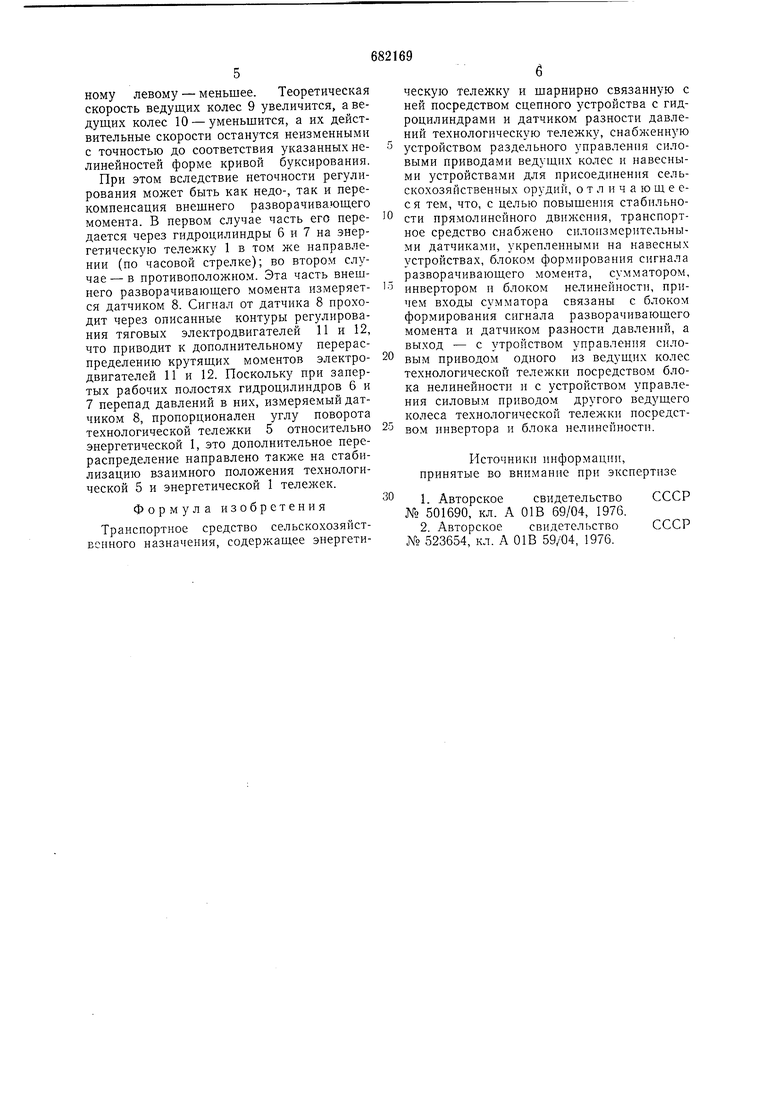
На фиг. 1 показана схема транспортного средства сельскохозяйственного назначения; на фиг. 2 - зависимость точности движения от интенсивности управляюпл,их воздействий.
Транспортное средство содержит энергетическую тележку 1 с дизельгенератором 2 и тяговым электродвигателем 3 заднего моста. С ней посредством вертикального шарнира 4 соединена технологическая тележка 5. Шарнир 4 блокирован гидроцилиндрами 6 и 7. В их рабочих полостях установлен датчик 8 разности давлений. Технологическая тележка 5 имеет силовые приводы ведущих колес 9 и 10, выполненные в
виде тяговых электродвигателей соответственно 11 и 12, управляемых с помощью обмоток возбуждения 13 и 14 и навесные устройства 15 и 16 для присоединения сельскохозяйственных орудий, в тяги 17, 18, 19 и 20 которых встроены силоизмернтельные датчики 21, 22, 23 и 24. Устройство раздельного зправления силовыми приводами ведущих колес 9 и 10 включает обмотки возбуждения 13 и 14, блок 25 формирования сигнала разворачивающего момента, сумматор 26, блок нелинейности 27, блок 28 регзлирования магнитного потока в обмотке возбзждения 13 тягового электродвигателя 11, инвертора 29, блок иелинейности 30 и блок 31 регулироваиия магнитного потока в обмотке возбуждения 14 тягового электродвигателя 12.
Выходы силоизмерительных датчиков 21, 22, 23 и 24 связаны с входами блока 25 формирования сигнала разворачивающего момента, а выход блока 25 - с одним из входов сумматора 26, другой вход сумматора связан с выходом датчика 8 разности давлений в гидроцилиндрах 6 и 7. Выход сумматора 26 подключен через блок нелинейности 27 к входу блока 28 регулирования магнитного потока в обмотке возбуждения 13, а через инвертор 29 и блок нелинейности 30 к входу блока 31 регулирования магнитного потока в обмотке возбуждения 14. При совпадении линии действия равнодействзющей сил сопротивления орудий с осью симметрии агрегата или при движении с выглублеииыми орудиями внешний разворачивающий момент, а еледовательно, сигнал на выходе блока 25 равен нулю. Если при этом угол поворота передних управляемых колес энергетической тележки равен нулю, т. е. управляющее воздействие водителя отсутствует, сигнал на выходе датчика 8 также равен нулю. Следовательно, па выходе сумматора 26 будет нулевой сигнал. При этом токи возбуждения тяговых электродвигателей 11 и 12 будут одинаковы и крутящие моменты их равны.
При отклонении линии действия равнодействующей сил сопротивления орудий от оси симметрии агрегата, например вправо, т. е. при действии на технологическую тележку 5 разворачивающего момента в паправлении по часовой стрелке и нулевом угле поворота передних управляемых колес энергетической тележки 1 сигнал на выходе блока 25, пропорциональный величине этого момента, будет положительным. Этот сигнал проходит через сумматор 26, блок нелинейности 27 к блоку 28 регулирования магнитного потока тягового электродвигателя 11, вызывая увеличение его крзтящего момента. Сигнал, пройдя через инвертор 29, блок нелинейности 30 к блоку 31 регулирования магнитного потока тягового электродвигателя 12, вызывает уменьшение его крутящего момента. Касательная сила
тяги, развиваемая правым ведущим колесом тележки 5, приводимым электродвигателем 11 будет больще, а касательная сила тяги, развиваемая левым ведущим колесом 10, приводимым электродвигателем 12, меньще.
Их разность, действуя на плече, равном колее технологической тележки 5, дает момент в горизонтальной плоскости, равный по величине и противоположный по направлению внешнему разворачивающему моменту, что н обеспечивает его компенсацию.
В случае педо- или перекомпенсации впешнего разворачивающего момента вследствие отклонения действительных значений коэффициентов еценления и буксования от запрограммированных в блоке нелинейности по кривой буксования сигнал на выходе датчика 8, суммируясь в сумматоре 26
с сигналом на выходе блока 25, оказывает корректирующее воздействие на систему. Если часть внешнего разворачивающего момента, действующего по часовой стрелке и оставшаяся недокомпенсированной, передается через гидроцилиндры 6 и 7 на энергетическую тележку, то сигнал на выходе датчика 8, пропорциональный величине недокомпепсированной части момента, передаваемой через гидроцилиндры 6 и 7, увеличит сигнал на выходе сумматора 26 и вызовет соответственно дополнительное увеличение момента тягового электродвигателя 1 I и дополнительное уменьшение момента тягового электродвигателя 12.
Описанное транспортное средство сельскохозяйственного назначения работает следующим образом.
При увеличении разворачивающего момента, передаваемого через навесные устройства 15 и 16 на технологическую тележку 5 по часовой стрелке, сумма моментов сил в тягах 17 и 18, измеряемых датчиками 21 и 22, относительно оси симметрии энергетической тележки 1 увеличится, а сумма
моментов сил в тягах 19 и 20, измеряемых датчиками 23 и 24, уменьшится. Вследствие этого сигнал на выходе блока 25, пропорциональный этому разворачивающему моменту, звеличится, а сигнал на выходе сумматора 26 возрастет на ту же величину. Этот сигнал, пройдя через блоки нелинейности 27 и 30, блоки 28 и 31 регулирования магнитных потоков в обмотках возбуждения 13 и 14, вызовет Звеличение крутящего
момента тягового электродвигателя 11 ведущих колес 9 и вследствие наличия иивертора 29 снижение крутящего момента тягового электродвигателя 12 ведущих колес 10. Причем благодаря блокам нелинейноети 27 и 30, равным по абсолютной величине приращениям касательных сил тяги на ведущих колесах 9, 10 будут соответствовать различные величины приращений частоты вращения: более нагруженному
правому борту - большее; менее нагруженному левому - меньшее. Теоретическая скорость ведущих колес 9 увеличится, а ведущих колес 10 - уменьшится, а их действительные скорости останутся неизменными с точностью до соответствия указанных нелинейностей форме кривой буксирования. При этом вследствие неточности регулирования может быть как недо-, так и перекомпенсация внешнего разворачивающего момента. В первом случае часть его передается через гидроцилиндры 6 и 7 на энергетическую тележку 1 в том же направлении (по часовой стрелке); во втором случае - в противоположном. Эта часть внешнего разворачивающего момента измеряется датчиком 8. Сигнал от датчика 8 проходит через описанные контуры регулирования тяговых электродвигателей 11 и 12, что приводит к дополнительному перераспределению крутящих моментов электродвигателей 11 и 12. Поскольку при запертых рабочих полостях гидроцилиндров 6 и 7 перепад давлений в них, измеряемый датчиком 8, пропорционален углу поворота технологической тележки 5 относительно энергетической 1, это дополнительное перераспределение направлено также на стабилизацию взаимного положения технологической 5 и энергетической 1 тележек.
Формула изобретения
Транспортное средство сельскохозяйственного назначения, содержащее энергетическую тележку и шарнирно связанную с ней посредством сцепного устройства с гидроцилиндрами и датчиком разности давлений технологическую тележку, снабженную устройством раздельного управления силовыми приводами ведущих колес и навесными устройствами для присоединения сельскохозяйственных орудий, отличающееся тем, что, с целью повышения стабильности прямолинейного движения, транспортное средство снабжено силоизмерительными датчиками, укрепленными на навесных устройствах, блоком формирования сигнала разворачивающего момента, сумматором,
инвертором и блоком нелинейности, причем входы сумматора связаны с блоком формирования сигнала разворачивающего момента и датчиком разности давлений, а выход - с утройством управления силовым приводом одного из ведущих колес технологической тележки посредством блока нелинейности и с устройством управления силовым приводом другого ведущего колеса технологической тележки посредст-5 вом инвертора и блока нелинейности.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР № 501690, кл. А 01В 69/04, 1976.
2. Авторское свидетельство СССР № 523654, кл. А 01В 59/04, 1976.

| название | год | авторы | номер документа |
|---|---|---|---|
| Транспортное средство сельскохозяйственного назначения | 1981 |
|
SU1001880A1 |
| Транспортное средство сельскохозяйственного назначения | 1981 |
|
SU1020019A1 |
| Транспортное средство сельскохозяйственного назначения | 1978 |
|
SU715042A1 |
| Транспортное средство сельскохозяйственного назначения | 1980 |
|
SU898972A1 |
| Транспортное средство сельскохозяйственного назначения | 1977 |
|
SU649348A1 |
| Установка для испытаний промышленного трактора | 1990 |
|
SU1742665A1 |
| Транспортное средство сельскохозяйственного назначения | 1974 |
|
SU523654A1 |
| Мобильное энергетическое средство | 1988 |
|
SU1504148A1 |
| Устройство управления гидропередачами технологических тележек транспортного средства | 1980 |
|
SU912557A1 |
| Транспортное средство сельскохозяйственного назначения | 1974 |
|
SU534192A1 |