Изобретение относится к судовой автоматике, в частности к авторулевым.
По основному авт. св. № 460534 известен авторулевой, содержащий подключенные к элементу сравнения задатчик и датчик угла курса, а также соединенные последовательно датчик угла перекладки руля, электронную модель угловой скорости курса судна и суммирующий усилитель мощности, к входам которого подключены выходы датчика угла перекладки руля и элемента сравнения, а выход предназначен для связн с исполнительным механизмом руля судна 1.
Недостатком известного устройства является недостаточная стабилизация угла курса судна.
Цель изобретения - повышение точности стабилизации угла курса судна при снабжении последнего жестким парусным вооружением.
Цель достигается тем, что авторулевой выполнен с датчиком угла перекладки паруса, выход которого связан с входом суммирующего усилителя мощности, а также электронной моделью угловой скорости курса судна относительно угла перекладки паруса, подключенной своим входом к выходу датчика угла перекладки паруса, а выходом - к входу суммирующего усилителя мощности.
На чертеже показана функциональная схема авторулевого.
Авторулевой содержит задатЧик 1 угла курса, элемент 2 сравнения, датчик 3 курса.
суммирующий усилитель 4 мощности, датчик 5 угла перекладки руля, электронную модель 6 угловой скорости курса судна, датчик 7 угла перекладки паруса, электронную
модель 8 угловой скорости курса судна относительно угла перекладки паруса;
Авторулевой работает следующим образом.
Заданное значение величины угла курса судна подается с задатчика 1 угла курса
судна для сравнения с величиной истинного угла курса судна, получаемой с датчика 3 курса, на элемент 2 сравнения. Результат сравнения суммируется на суммирующем усилителе 4 мощности с сигналами с датс чика 5 угла перекладки руля, с датчика 7 перекладки паруса, с сигналом, получаемым с электронной модели 6 угловой скорости курса судна относительно угла перекладки руля, на вход которой подается сигнал с датчика 5 угла перекладки руля, и с сигна0 лом, получаемым с электронной модели 8 угловой скорости курса судна относительно угла перекладки паруса, на вход которой подается сигнал с датчика угла перекладки паруса. Сигнал с суммирующего усилителя мощности подается на исполнительный механизм руля судна.
Предлагаемый авторулевой возможно использовать на ветроходах с обеспечением высокой точности угла курса и уменьщением расхода энергии в рулевом приводе при повороте паруса.
| название | год | авторы | номер документа |
|---|---|---|---|
| Авторулевой | 1983 |
|
SU1183944A2 |
| Устройство для перестройки параметров авторулевого | 1974 |
|
SU528546A1 |
| Система управления ветроходом | 1983 |
|
SU1201802A1 |
| Авторулевой | 1973 |
|
SU460534A1 |
| Авторулевой | 1979 |
|
SU842725A1 |
| Авторулевой | 1975 |
|
SU540258A1 |
| Устройство для управления движением судна | 1983 |
|
SU1150155A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ КУРСОМ СУДНА И СИСТЕМА АВТОРУЛЕВОГО ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 2004 |
|
RU2282884C2 |
| Авторулевой | 1987 |
|
SU1529181A1 |
| АВТОРУЛЕВОЙ С ОЦЕНКОЙ УГЛОВОЙ СКОРОСТИ | 2004 |
|
RU2269451C1 |
АВТОРУЛЕВОЙ по авт. св. № 460534, отличающийся тем,.что, с целью повышения точности стабилизации угла курса судна при снабжении последнего жестким парусным вооружением, он выполнен с датчиком угла перекладки паруса, выход которого связан с входом суммируюш.его усилителя мош,ности, а также электронной моделью угловой скорости курса судна относительно угла перекладки паруса, подключенной своим входом к выходу датчика угла перекладки паруса, а выходом - к входу суммирующего усилителя мощности. (Л со оо 05 1чЭ ьо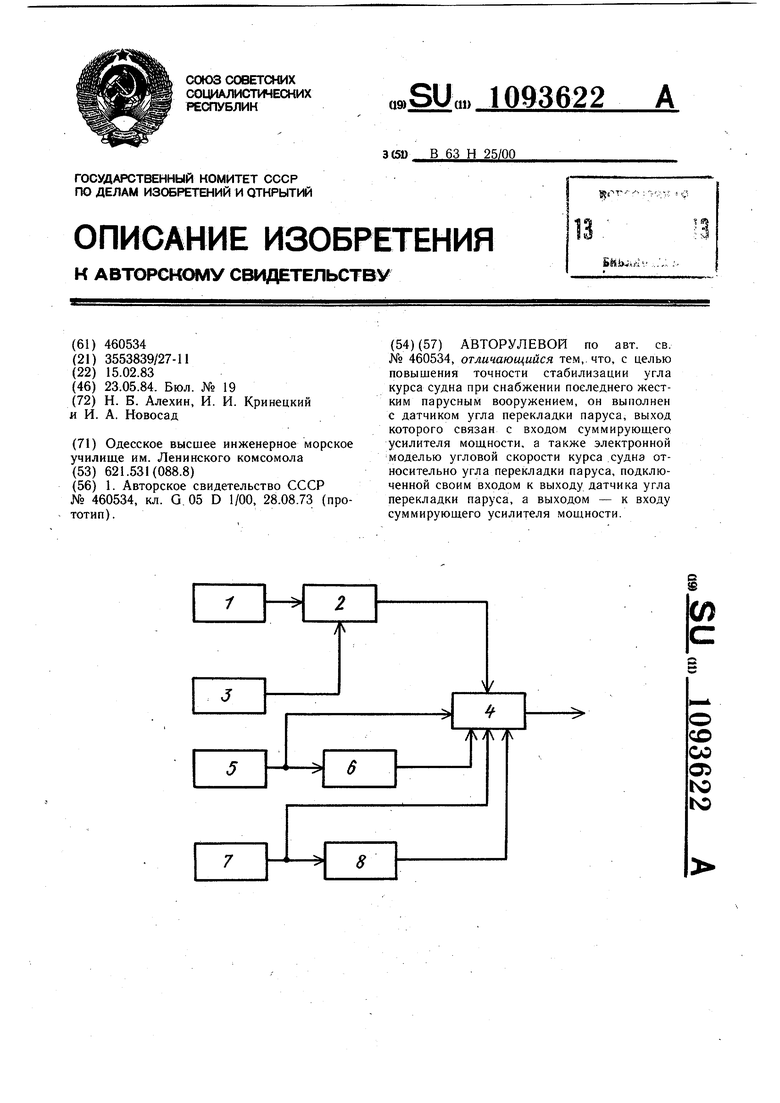
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Авторулевой | 1973 |
|
SU460534A1 |
| G, 05 D 1/00, 28.08.73 (прототип). | |||
