Изобретение относится к судовождению, а именно к способам и устройствам автоматического управления курсом судна, в частности к системам судовых авторулевых.
Известен авторулевой, содержащий элемент сравнения истинного и заданного курсов, связанный с устройством формирования сигнала управления, включающего операционный, дифференциальный и интегральный усилители с сумматором, управляющий сигнал с которого через усилитель передается на исполнительный механизм кормового руля; а также датчик положения руля, связанный со входом сумматора (а.с. SU 460535, опубл. 15.02.1975).
Известно устройство управления движением судна, содержащее датчик и задатчик направления движения, датчики угла перекладки руля, угловой скорости судна, выходы которых подключены через суммирующий усилитель к рулевому приводу (а.с. SU 979204, опубл. 07.12.1982).
Известны различные системы управления курсом судна, включающие элементы прогнозирования, встроенные как на входе системы, например задатчик курса с прогнозированием (а.с. SU 610721, опубл. 15.06.1978), так и в саму систему авторулевого.
В вышеприведенных системах авторулевого отсутствует адекватная математическая модель движения реального судна, и/или прогнозирования движения, что определяет значительное "рыскание", которое может привести к перегрузке привода пера руля, особенно в случае изменения внешнего воздействия на судно, а также невозможности использования авторулевого при боковом ветре, сильном волнении и т.п.
Известно устройство для управления движением судна, содержащее датчики угла перекладки руля и курса, задатчик курса, блок производной, суммирующий блок, регулятор рулевого привода, дифференциатор, блок модели движения судна, выполненный в виде электронного интегратора (а.с. SU 1150155, опубл. 15.04.1985). Реализация электронной модели осуществлена на элементах вычислительной техники в простейшем случае в виде инерционного звена. Используемая математическая модель, способ определения ее параметров и характер взаимосвязи между блоками системы не позволяют эффективно использовать известное устройство без корректора крутизны закладки руля, а также определяют относительно медленную реакцию при изменении внешнего воздействия на судно.
Известно устройство прогнозирования будущего состояния корабля, содержащее датчики угла дифферента, угловой скорости, скорости хода корабля, блок памяти, вычислитель, индикаторы, блоки уставок, компараторы, задатчик интервала времени прогноза, блок внешнего воздействия, блок управления воздействием, блок программы работы (патент RU 2189624, опубл. 20.09.2002). Известен способ прогнозирования фазового состояния судна (патент RU 2221726, опубл. 20.01.2004). Способ основан на использовании фазовых координат судна: угловой скорости и угла дифферента, а также программных возмущающих и управляющих сил, действующих на судно. Их подают на вход электронной модели движения судна, работающей в ускоренном масштабе времени. На ее выходе вырабатываются предсказанные значения угловой скорости и угла дифферента в будущий момент времени. Сигналы прогнозируемых значений скорости и угла, вырабатываемые на выходе модели, сравнивают с их допусками: при превышении ими допуска выдают сигнал оператору о сбое в системе, и процесс прогнозирования прекращается, а при непревышении допусков измеренные фазовые координаты судна принимают за начальные и вводят их на вход модели вместе с сигналами, пропорциональными упомянутым силам. Циклы вычисления значения прогнозируемой угловой скорости и прогнозируемого угла дифферента повторяют. Устройство, реализующее способ, содержит блок измерения, блок памяти, программные блоки, электронную модель движения судна, динамическую модель судна, блок индикаторов и блок оценивания. Вышеописанные устройства и способ, с учетом применяемой математической модели, могут быть эффективно использованы только для управления движением судна при периодически повторяющихся сильных возмущающих воздействиях, величина которых и время приложения заранее известны.
Известны различные способы определения параметров математической модели, например определение постоянной времени инерционного звена основывают на измерении входных и выходных сигналов, формировании по ним невязки, которую интегрируют и вырабатывают сигнал, пропорциональный искомому коэффициенту математической модели (а.с. SU 166541, опубл. 19.11.1964). Согласно другому экспериментальному способу (а.с. SU 205913, опубл. 02.12.1967) выходной сигнал с исследуемого объекта запоминают (задерживают), формируют невязку, а затем пропускают через электронную модель исследуемого объекта, по которой варьируют величину коэффициента математической модели объекта. В данных моделях применены постоянные весовые коэффициенты, а достаточно точно можно определить только коэффициент постоянной времени инерционного звена. Однако в процессе плавания в зависимости от условий эксплуатации судна (скорости, глубины под килем, загрузки, крена, угла дифферента, внешних воздействий, динамических характеристик судна) параметры математической модели существенно изменяются, что отрицательно сказывается на качестве автоматического управления. Поэтому используются многопараметрические модели, например, в одном из известных способов (патент RU 2151713, опубл. 27.06.2000) точность определения параметров модели движения судна достигается благодаря использованию сигнала бокового сноса от приемника спутниковой навигационной системы и электронной модели, соответствующей полной математической модели движения судна, причем для подстройки параметров используется двухмерный критерий с переменными весовыми коэффициентами. В другом техническом решении (патент RU 2224279, опубл. 20.02.2004) автоматический регулятор путевого угла включает вычислитель бокового отклонения судна от заданной траектории, блок оценки состояния судна и сумматор, а заложенная в регуляторе математическая модель осуществляет стабилизацию и управление движением судна, включая оценку угла дрейфа судна. Однако такие многопараметрические модели движения судна требуют обработки сигналов нескольких датчиков, сигналы с которых в совокупности все же не могут учесть все условия эксплуатации судна. Кроме этого, задача установки параметров настройки регулятора решается для ограниченного диапазона внешних возмущающих воздействий.
Одним из путей повышения эффективности судовых авторулевых является введение дополнительной нелинейной корреляционной модели движения судна, изменяющей линейную математическую модель, заложенную в автоматическом регуляторе. Например, известна усовершенствованная система судового автопилота (патент US 6611737, опубл. 26.08.2003), в частности, содержащая: корреляционный процессор для получения входных значений и определения на основе нелинейной корреляции прогнозируемых значений, касающихся управления курсом; датчики для определения местоположения судна и состояния судна, сигнал с которых поступает на корреляционный процессор; средства для обеспечения передачи на корреляционный процессор значений, касающихся текущего контроля; прогнозирующий контроллер, работающий на основе линейной модели, изменяющейся во времени в зависимости от данных, полученных с корреляционного процессора, и вырабатывающий обобщенный сигнал управления. Однако используемые многопараметрические математические модели не решают задачу точной надежной настройки регулятора для всего диапазона внешних возмущающих воздействий.
Решаемая техническая задача - повышение эффективности автоматического управления курсом судна с использованием авторулевого за счет уменьшения рыскания судна.
Предлагается способ автоматического управления курсом судна, согласно которому задают требуемый курс судна, определяют величину курсового отклонения между требуемым курсом судна и действительным курсом судна за определенный интервал времени, по курсовому отклонению формируют сигнал управления рулевым приводом, обеспечивающим величину курсового отклонения в пределах заданного допустимого значения. Новым является то, что идентифицируют математическую модель судна по величине угла закладки руля и действительному курсу судна, на базе идентифицированной математической модели судна оптимизируют параметры, необходимые для формирования сигнала управления рулевым устройством, причем сигнал управления рулевым устройством формируют также по скорости курсового отклонения и накопленной величине курсового отклонения.
Сигнал управления рулевым устройством может быть сформирован при помощи пропорционально-дифференциально-интегрального регулятора.
В качестве математической модели судна лучше использовать нелинейную модель с постоянными времени, зависящими от условий эксплуатации судна.
Предлагаемая система авторулевого судна содержит: сумматор, первый вход которого имеет возможность подключения к выходу задатчика курса, а второй вход которого имеет возможность подключения к выходу средства определения действительного курса; автоматический регулятор, первый вход которого соединен с выходом сумматора, второй вход имеет возможность подключения к датчику угла закладки руля, а выход имеет возможность соединения с входом устройства управления рулевым приводом; а также блок математической модели судна. Новым является то, что система дополнительно содержит блок оптимизации параметров автоматического регулятора, вход которого соединен с выходом блока математической модели судна, а выход которого соединен с третьим входом автоматического регулятора, при этом первый вход блока математической модели судна имеет возможность подключения к датчику угла закладки руля, а его второй вход имеет возможность подключения к средству определения действительного курса.
Автоматический регулятор лучше выполнять в виде пропорционально-дифференциально-интегрального регулятора.
Также автоматический регулятор лучше выполнять в виде микропроцессорной станции, в состав которой также могут входить как блок математической модели судна, так и блок оптимизации.
Лучше, когда блок математической модели судна выполнен с возможностью идентификации текущей математической модели судна.
В качестве средства определения действительного курса как в способе, так и в системе могут быть использованы любые известные средства, например судовой гирокомпас с датчиком курса, феррозонд, система GPS и т.п.
Изобретение поясняется чертежами.
На фиг.1 представлена функциональная схема системы авторулевого судна. Горизонтально стрелкой, выполненной двойной сплошной линией, на фиг.1 условно показан заданный курс судна; горизонтальной стрелкой, выполненной двойной пунктирной линией, - действительный курс судна; вертикальной стрелкой, выполненной пунктирной линией, - возмущение от внешнего воздействия. Латинскими буквами обозначено: Δy - величина курсового отклонения; u - управляющий сигнал; β - угол закладки руля.
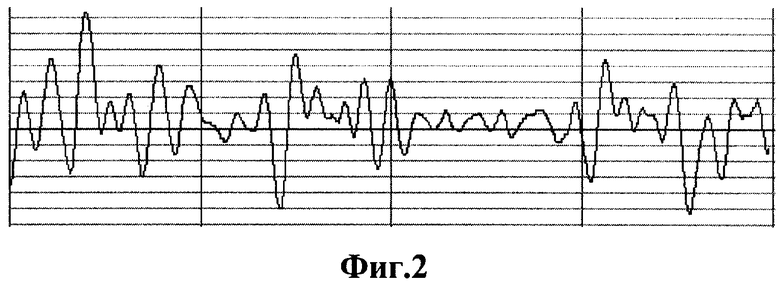
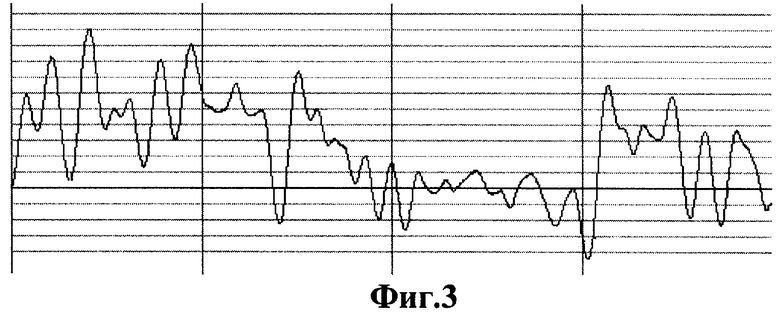
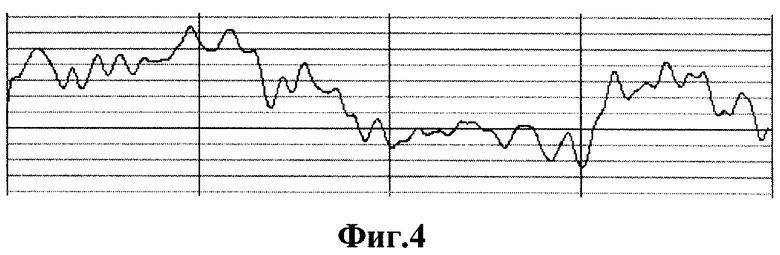
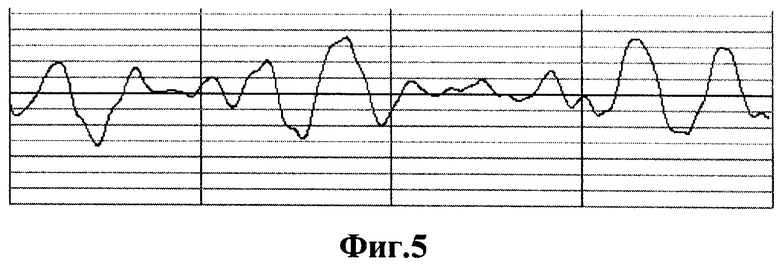
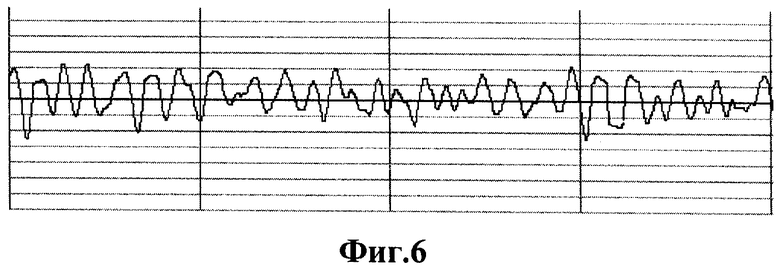
На фиг.2-6 представлены экспериментальные данные процесса идентификации и оптимизации параметров системы авторулевого судна: фиг.2 - курс судна до адаптации; фиг.3 - курс идентифицированной математической модели судна с возмущением; фиг.4 - идентифицированное возмущение; фиг.5 - курс математической модели после оптимизации регулятора; фиг.6 - курс судна с новыми параметрами регулятора.
Изобретение поясняется на примере системы авторулевого судна.
Система авторулевого (см. фиг.1) судна 1 как объекта управления включает автоматический регулятор 2, устройство управления рулевой машиной 3, блок идентификации 4, блок оптимизации 5.
Автоматический регулятор 2 формирует управляющий сигнал для перекладки руля рулевой машиной 3, реализуя при этом пропорционально-дифференциально-интегральную функцию, например, вида
где ki - коэффициенты усиления; Δy - величина курсового отклонения как разница между действительным курсом, определяемым, например, по данным датчика гирокомпаса, комбинированного с системой GPS, и заданным курсом, например от задатчика курса; Т - интервал времени. Автоматический регулятор учитывает при этом текущий угол закладки руля.
Во время работы системы блок идентификации 4 по величине угла закладки руля β, например, измеряемой датчиком закладки руля (не показан), и действительному курсу идентифицирует текущую математическую модель судна, например, описываемую в общем виде нелинейной функцией
где k - коэффициент усиления, зависящий от скорости судна, площади пера руля и т.п.; Ti - постоянные времени, в частности, зависящие от осадки, обрастания и т.п.; р - оператор Лапласа.
Блок оптимизации 5 во время работы системы на базе идентифицированной блоком 4 математической модели судна оптимизирует параметры вышеприведенной пропорционально-дифференциально-интегральной функции, что значительно упрощает процесс работы автоматического регулятора и минимизирует "рыскание" судна.
Таким образом, задача настройки автоматического регулятора 2 сведена к определению оптимального вектора регулируемых параметров в гиперпространстве допустимых значений этих параметров.
Предлагаемое изобретение было экспериментально апробировано на морском судне водоизмещением 21 тонна - на фиг.2-6 приведены результаты экспериментального исследования процессов идентификации и оптимизации параметров авторулевого для судна при скорости ветра 10-15 м/с и волнении моря 3-4 балла. Проведенные эксперименты показали более высокую эффективность использования предлагаемой системы по сравнению с существующими аналогами, в частности, за счет снижения рыскания, что, как следствие, снижает нагрузки на рулевой механизм, увеличивая срок его службы, а также уменьшает расход топлива, особенно при сильном волнении и ветре. Таким образом практически решается задача точной и быстрой настройки параметров автоматического регулятора для широкого диапазона внешних возмущающих воздействий.
Приведенный пример использован только для целей иллюстрации возможности осуществления изобретения и не ограничивает объем правовой охраны, представленный в формуле изобретения, при этом специалист в данной области техники относительно просто способен осуществить и другие пути осуществления изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АВТОМАТИЧЕСКОЙ ПРОВОДКИ СУДНА | 2021 |
|
RU2759068C1 |
| АВТОРУЛЕВОЙ С ОЦЕНКОЙ УГЛОВОЙ СКОРОСТИ | 2004 |
|
RU2269451C1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ПРОВОДКИ СУДОВ | 2005 |
|
RU2277495C1 |
| ОПЫТОВЫЙ МОРСКОЙ МОДУЛЬНЫЙ КОМПЛЕКС | 2021 |
|
RU2760823C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ СУДНОМ ПО КУРСУ И ИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2012 |
|
RU2519315C2 |
| Авторулевой | 1979 |
|
SU842725A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ КУРСОМ СУДНА | 1991 |
|
RU2012919C1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ПРОВОДКИ СУДНА | 2012 |
|
RU2501708C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА С КОМПЕНСАЦИЕЙ МЕДЛЕННО МЕНЯЮЩИХСЯ ВНЕШНИХ ВОЗМУЩЕНИЙ И СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА С КОМПЕНСАЦИЕЙ МЕДЛЕННО МЕНЯЮЩИХСЯ ВНЕШНИХ ВОЗМУЩЕНИЙ | 2014 |
|
RU2564786C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ПРОДОЛЬНЫМ ДВИЖЕНИЕМ СУДНА | 2002 |
|
RU2224279C1 |
Изобретение относится к области приборостроения и может быть использовано в системах управления различного назначения. Технический результат - расширение функциональных возможностей. Для достижения данного результата задают требуемый курс судна, определяют величину курсового отклонения между требуемым курсом судна и действительным курсом судна за определенный интервал времени. При этом параметры математической модели идентификации системы управления судном функционально связывают с величиной угла закладки руля и действительного курсу судна. На основе математической модели судна оптимизируют параметры системы управления рулевым устройством. 2 н. и 6 з.п. ф-лы, 6 ил.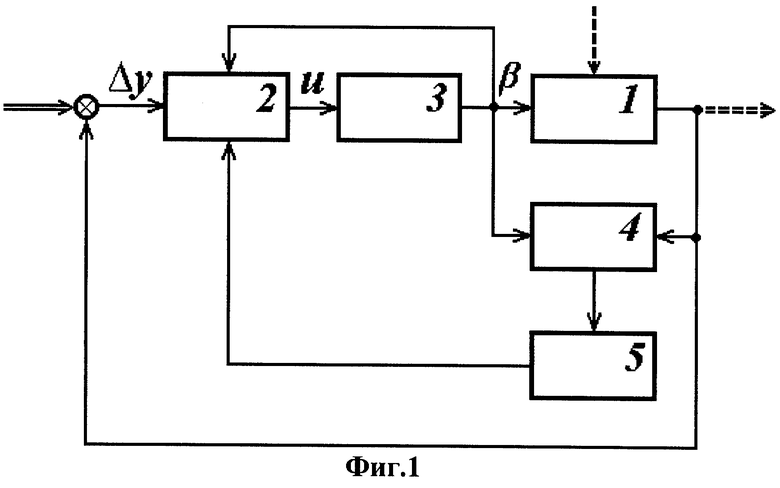
| US 6611737 А, 26.08.2003 | |||
| УСТРОЙСТВО УПРАВЛЕНИЯ ПРОДОЛЬНЫМ ДВИЖЕНИЕМ СУДНА | 2002 |
|
RU2224279C1 |
| СПОСОБ ЭКСПЕРИМЕНТАЛЬНОГО ОПРЕДЕЛЕНИЯ КОЭФФИЦИЕНТОВ МАТЕМАТИЧЕСКОЙ МОДЕЛИ ДВИЖЕНИЯ СУДНА | 1999 |
|
RU2151713C1 |
| СПОСОБ ЭКСПЕРИМЕНТАЛЬНОГО ОПРЕДЕЛЕНИЯ | 0 |
|
SU205913A1 |
| ВОРОНОВ А.А | |||
| Основы теории автоматического управления | |||
| - М.: Энергия, 1965, с.24. | |||

