Изобретение относится к подъемно-транспортной технике, в частности к двухчелюстным грейферам.
Известен двухчелюстной грейфер, содержащий навешиваемую на грузоподъемный механизм раму с направляющими, установленные в них каретки, размещенные на раме ограничители хода кареток, соединенные с каретками с возможностью поворота в вертикальной плоскости челюсти и приводной механизм смыкания челюстей, включающий в себя отклоняющие блоки и охватывающие их гибкие элементы 1.
Эксплуатационные, возможности известного грейфера ограничены, так как он не может быть использован для очистки различных поверхностей.
Цель изобретения - расширение эксплуатационных возможностей путем обеспечения очистки дна ограниченных водных бассейнов.
Для достижения этой цели двухчелюстной грейфер, содержащий навешиваемую на грузоподъемный механизм раму с направляющими, установленные в них каретки, размещенные на раме ограничители хода кареток, соединенные с каретками с возможностью поворота в вертикальной плоскости челюсти и приводной механизм смыкания челюстей, включающий в себя отклоняющие блоки и охватывающие их гибкие элементы, снабжен установленными на концах рамы и в ее центральной части опорными стойками и ограничителями поворота челюстей, каждая из которых представляет собой скребок, соединенный с кареткой посредством вилки с возможностью возвратнопоступательного перемещения, при этом с вилкой скребок соединен посредством упругого элемента и щарнира, ось которого перпендикулярна рабочей плоскости скребка.
Кроме того, каретка представляет собой вертикальную пластину, расположенную с зазором в направляющих рамы, а соединение каждой вилки с соответствующей вертикальной пластиной может включать в себя смонтированную в нижней части последней ось, расположенную в пазах, выполненных в вилке, при этом ограничители поворота челюстей представляют собой закрепленные в нижней части рамы кронштейны с упорами для упомянутых вилок.
При этом гибкие элементы механизма смыкания челюстей закреплены на вилках, попарно соединены между собой и посредством грузовых тяг связаны с приводом.
Рама на концах и опорные стойки снабжены выступающими над ними роликами для перемещения грейфера.
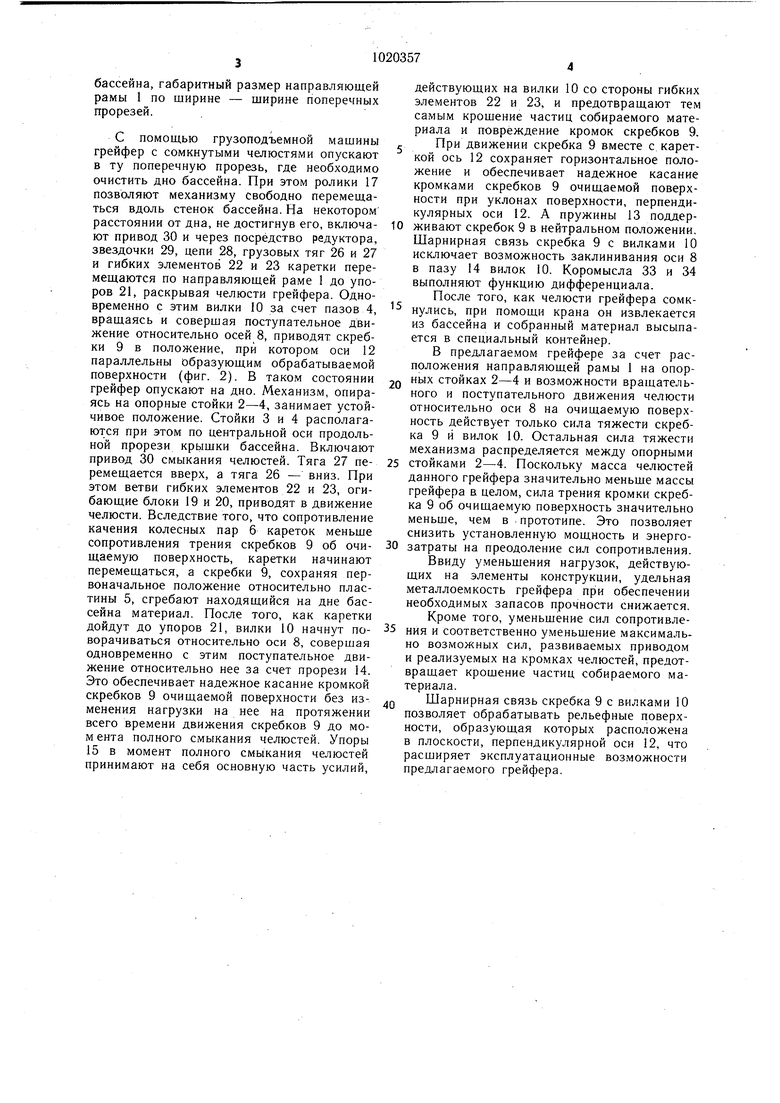
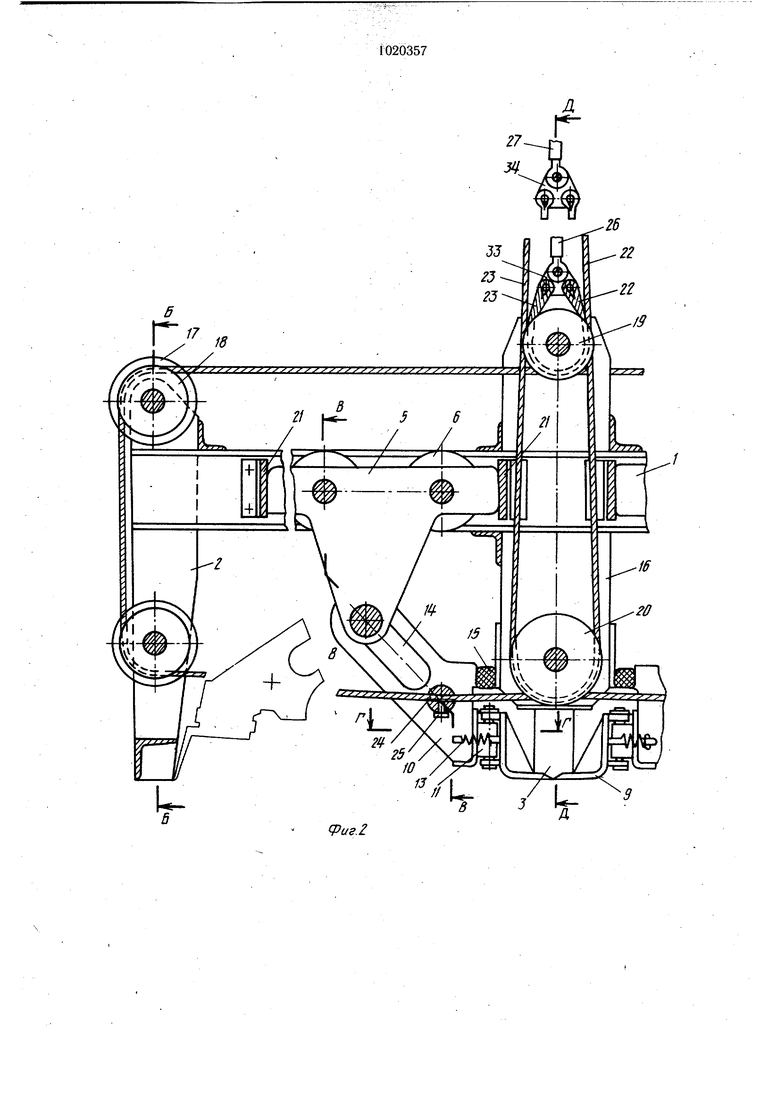
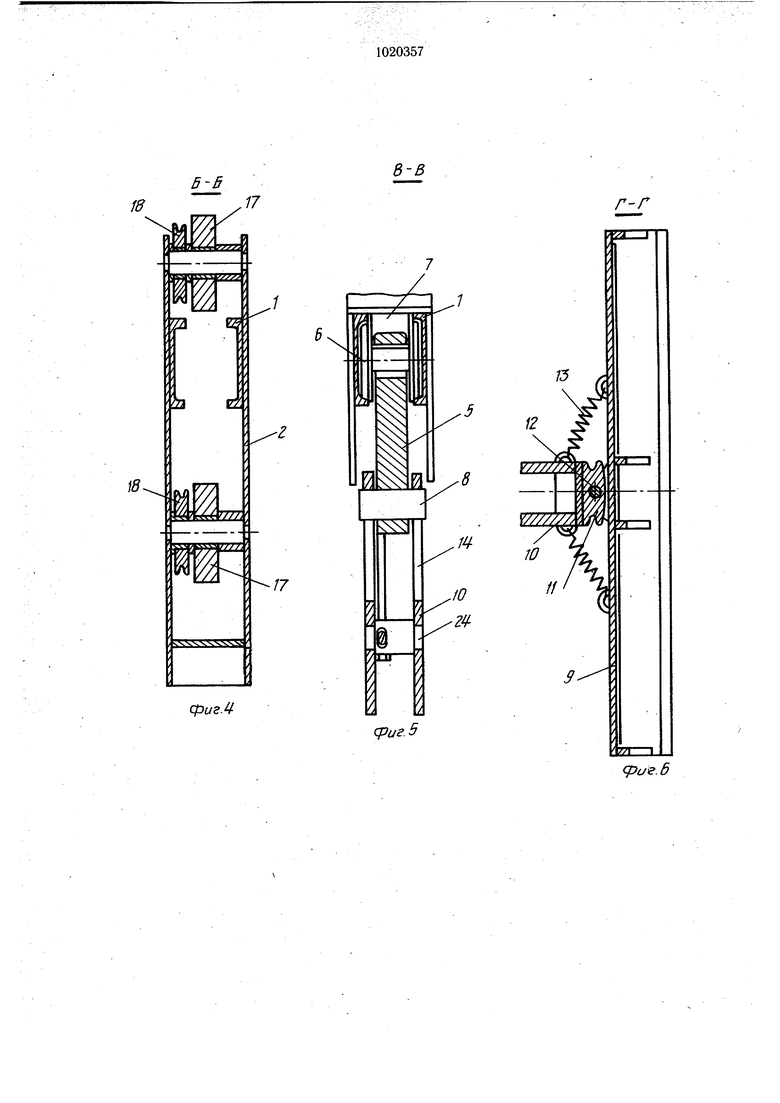
На фиг. 1 представлен грейфер, общий вид; на фиг. 2 - направляющая рама с кареткой в увеличенном размере, несущей челюсть; на фиг. 3 - разрез А-А на фиг. 1; на фиг. 4 - разрез Б-Б на фиг. 2; на фиг. 5 - разрез В-В на фиг. 2; на фиг. 6 -
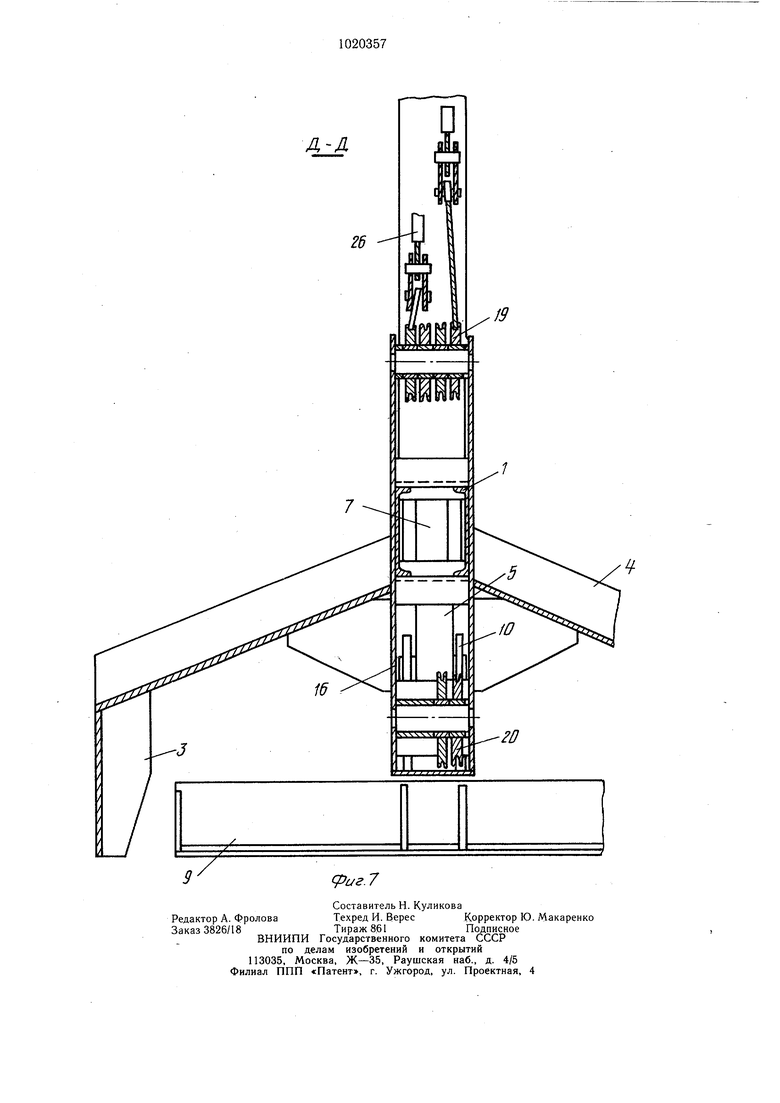
разрез Г-Г на фиг. 2; на фиг. 7 - разрез Д-Д на фиг. 2.
Грейфер содержит направляющую раму 1 с опорными стойками 2 на ее концах и 3 и 4 - в центральной ее части (фиг. 1, 2 и 6). На направляющей раме 1 симметрично относительно вертикальной оси грейфера установлены подвижные вдоль нее каретки. Каждая из кареток (фиг. 2) содержит несущую балку, выполненную в виде
0 вертикальной пластины 5, закрепленной на осях колесных пар 6. Пластина 5 расположена с зазорами в продольном пазу 7 (фиг. 6 и 7) направляющей рамы 1. В нижнюю часть каждой пластины 5 вмонтирована ось 8. Каждая из челюстей грейфера представляет собой скребок 9 ковшеобразной формы, соединенный с вилкой 10 шарнирно при помощи цапф 11 и оси 12, а также пружин 13 (фиг. 5). Корпус цапфы 11, прикрепленной к вилкам 10, ограничивает
д поворот скребка 9 вокруг оси 12. Причем ось 12 перпендикулярна рабочей плоскости скрёбка 9. В вилках 10 сделаны продольные сквозные пазы 14, взаимодействующие с концами оси 8 (фиг. 4). Вилки 10 взаимодействуют с упорами 15, укрепленными на
5 кронштейне 16, расположенном в центральной части направляющей рамы 1.
На концах направляющей рамы 1 (фиг. 3) и опорных стоек 2 на одних осях укреплены ролики 17 для свободного движения грейфера вдоль стенок бассейна (в случае чистки
0 дна его), а также отклоняющие блоки 18 механизма смыкания челюстей. Кроме того, отклоняющие блоки 19 и 20 укреплены на кронштейне 16. На направляющей раме 1 установлены ограничители 21 хода кареток. Механизм смь1кания челюстей содержит два
гибких элемента 22 и 23, каждый из которых прикреплен к вилке 10 соответствующей челюсти при помощи оси 24 и винта 25. Далее оба гибких элемента 22 и 23, огибая одной ветвью блоки 18 и 19, а второй - блоки 20 - и 19, попарно соединены между собой и затем с грузовыми тягами 26 и 27. Концы грузовых тяг 26 и 27, в свою очередь, соединены между собой цепью 28, которая огибает звездочку 29, установленную на валу редуктора привода 30. Привод 30 расположен на траверсе 31, связанной с направляющей рамой 1 стержневой фермой 32 трапецеидальной формы. Причем концы гибких элементов 22 и 23 соединены с грузовыми тягами 26 и 27 посредством коромысел 33 и 34. Грейфер навешивается на
0 крюк грузоподъемной мащины.
Работа грейфера приведена на примере очистки им дна бассейна выдержки кассет атомных реакторов. Такие бассейны имеют фасонные крышки с перекрещивающимися прорезями: центральной продольной и перпендикулярными ей - поперечными. В данном случае габаритный размер грейфера по длине должен соответствовать ширине
бассейна, габаритный размер направляющей рамы 1 по ширине - ширине поперечных прорезей.
С помощью грузоподъемной машины грейфер с сомкнутыми челюстями опускают в ту поперечную прорезь, где необходимо очистить дно бассейна. При этом ролики 17 позволяют механизму свободно перемещаться вдоль стенок бассейна. На некотором расстоянии от дна, не достигнув его, включают привод 30 и через посредство редуктора, звездочки 29, цепи 28, грузовых тяг 26 и 27 и гибких элементов 22 и 23 каретки перемещаются по направляющей раме 1 до упоров 21, раскрывая челюсти грейфера. Одновременно с этим вилки 10 за счет пазов 4, вращаясь и совершая поступательное движение относительно осей 8, приводят скребки 9 в положение, при котором оси 12 параллельны образующим обрабатываемой поверхности (фиг. 2). В таком состоянии грейфер опускают на дно. Механизм, опираясь на опорные стойки 2-4, занимает устойчивое положение. Стойки 3 и 4 располагаются при этом по центральной оси продольной прорези крь1шки бассейна. Включают привод 30 смыкания челюстей. Тяга 27 перемещается вверх, а тяга 26 - вниз. При этом ветви гибких элементов 22 и 23, огибающие блоки 19 и 20, приводят в движение челюсти. Вследствие того, что сопротивление качения колесных пар 6 кареток меньше сопротивления трения скребков 9 об очищаемую поверхность, каретки начинают перемещаться, а скребки 9, сохраняя первоначальное положение относительно пластины 5, сгребают находящийся на дне бассейна материал. После того, как каретки дойдут до упоров 21, вилки 10 начнут поворачиваться относительно оси 8, совершая одновременно с этим поступательное движение относительно нее за счет прорези 14. Это обеспечивает надежное касание кромкой скребков 9 очищаемой поверхности без изменения нагрузки на нее на протяжении всего времени движения скребков 9 до мом ента полного смыкания челюстей. Упоры 15 в момент полного смыкания челюстей принимают на себя основную часть усилий.
действующих на вилки 10 со стороны гибких элементов 22 и 23, и предотвращают тем самым крошение частиц собираемого материала и повреждение кромок скребков 9. г При движении скребка 9 вместе с кареткой ось 12 сохраняет горизонтальное положение и обеспечивает надежное касание кромками скребков 9 очищаемой поверхности при уклонах поверхности, перпендикулярных оси 12. А пружины 13 по.адер0 живают скребок 9 в нейтральном положении. Шарнирная связь скребка 9 с вилками 10 исключает возможность заклинивания оси 8 в пазу 14 вилок 10. Коромысла 33 и 34 выполняют функцию дифференциала.
После того, как челюсти грейфера сомкнулись, при помощи крана он извлекается из бассейна и собранный материал высыпается в специальный контейнер.
В предлагаемом грейфере за счет расположения направляющей рамы 1 на опорQ ных стойках 2-4 и возможности вращательного и поступательного движения челюсти относительно оси 8 на очищаемую поверхность действует только сила тяжести скребка 9 и вилок 10. Остальная сила тяжести механизма распределяется между опорными
5 стойками 2-4. Поскольку масса челюстей данного грейфера значительно меньше массы грейфера в целом, сила трения кромки скребка 9 об очищаемую поверхность значительно меньше, чем в прототипе. Это позволяет снизить установленную мощность и энерго0 затраты на преодоление сил сопротивления. Ввиду уменьшения нагрузок, действующих на элементы конструкции, удельная металлоемкость грейфера при обеспечении необходимых запасов прочности снижается. Кроме того, уменьшение сил сопротивле5 НИН и соответственно уменьшение максимально возможных сил, развиваемых приводом и реализуемых на кромках челюстей, предотвращает крошение частиц собираемого материала.
Q Шарнирная связь скребка 9 с вилками 10 позволяет обрабатывать рельефные поверхности, образующая которых расположена в плоскости, перпендикулярной оси 12, что расширяет эксплуатационные возможности предлагаемого грейфера.
ригА
7
18
Л
/J
Л
| название | год | авторы | номер документа |
|---|---|---|---|
| Двухчелюстной грейфер для очистки дна ограниченных водных бассейнов с балочным перекрытием | 1983 |
|
SU1076396A1 |
| Двухчелюстный грейфер | 1974 |
|
SU527367A1 |
| КРАН-МАНИПУЛЯТОР МЕТАЛЛОВОЗНЫЙ | 1998 |
|
RU2140367C1 |
| ГРЕЙФЕР | 1993 |
|
RU2082854C1 |
| Ковшовый грейфер | 1984 |
|
SU1193103A1 |
| КРАН-МАНИПУЛЯТОР ЛЕСОВОЗНЫЙ | 1999 |
|
RU2169673C2 |
| Грейфер для рытья траншей | 1978 |
|
SU831908A1 |
| Грейфер | 1981 |
|
SU972006A1 |
| Грейфер | 1981 |
|
SU965954A1 |
| Грейфер для бревен | 1988 |
|
SU1548152A1 |

1. ДВУХЧЕЛЮСТНОЙ ГРЕЙФЕР, содержащий навешиваемую на грузоподъемный механизм раму с направляющими, установленные в них каретки, размещенные на раме ограничители хода кареток, соединенные с каретками с возможностью поворота в вертикальной плоскости челюсти и приводной механизм смыкания челюстей, включающий в себя отклоняющие блоки и охватывающие их гибкие элементы, отличающийся тем, что, с целью расщирения эксплуатационных возможностей путем обеспечения очистки дна ограниченных водных бассейнов, он снабжен установленными на концах рамы и в ее центральной части опорными стойками и ограничителями поворота челК)Стей, каждая из которых представляет собой скребок, соединенный с кареткой посредством вилки с возможностью возвратнопоступательного перемещения, при этом с вилкой скребок соединен посредством упругого элемента и щарнира, ось которого перпендикулярна рабочей плоскости скребка. 2.Грейфер по п. 1, отличающийся тем, что каретка представляет собой вертикальную пластину, расположенную с зазором в направляющих рамы, а соединение каждой вилки с соответствующей вертикальной пластиной включает в себя смонтированную в нижней части последней ось, расположенную р пазах, выполненных в вилке, при этом ограничите,1и поворота челюстей представляют собой закрепленные в нижней части рамы кронщтейны с упорами для упомянутых вилок. 3.Г рейфер по п. 1, отличающийся тем, что гибкие элементы механизма смыкания челюстей закреплены на вилках, попарно соединены между собой и посредством грузовых тяг связаны с приводом. 4.Грейфер по п. 1, отличающийся тем, что рама на концах и опорные стойки снабО жены выступающими над ними роликами to для перемещения грейфера. о 00 сд -s)
риг.З
18/77
8-В
ГГ
jHI Wt
ef
/Я/7
фиг.4
12
риг. 5
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Торцевой захват к грейферу для бревен | 1955 |
|
SU115033A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
