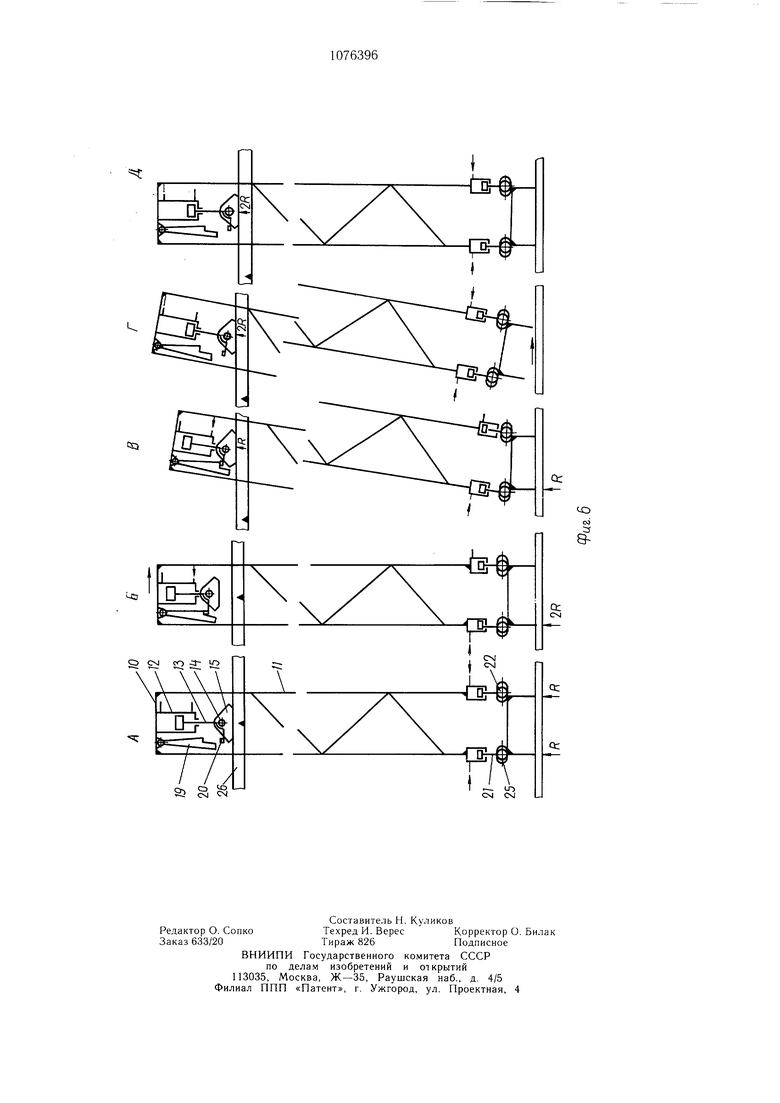
Изобретение относится к подъемно-транс11()|)Т110Й технике, конкретнее к двухчелюстiHiiM грейферам, и может быть использовано для очистки различных поверхностей, например, дна ограниченных водных басгей нов. Известен двухчелюстной грейфер для очистки дна ограниченных водных бассейнов с балочным перекрытием, содержащий раму с опорными стойками на концах и в центральной части, уста-новленные в нагфавляющих рамы каретки с челюстями и механизм смыкания челюстей, кинематически связанный с приводом, размещенным на траверсе, соединенной с рамой стержневой фермой 1. Однако известный грейфер обладает недостаточно высокой производительностью, так как передвижение его вдоль очищаемой поверхности с помощью подъемного механизма не может обеспечить оптимальный щаг перемещения грейфера для прохождения скребками челюстей всей очищаемой поверхности. Для качественной очистки дна необходимо, чтобы щаг перемещения грейфера не превышал длины скребка челюсти. Если же щаг перемещения грейфера больше длины скребка, то на очищаемой поверхности остаются загрязненные участки. В некоторых случаях, учитывая характер собираемого со дна материала и необходимость соблюдения при этом техники безопасности, такие явления нежелательны. Это касается, например, очистки дна бассейнов выдержки кассет атомных реакторов. Если же щаг перемещения грейфера значительно меньше длины скребка, то снижается его производительность. Кроме того, недостатком известного грейфера является также необходимость постоянного использования грузоподъемного механизма для его перемещения вдоль очищаемой поверхности. Однако непрерывное использование грузоподъемного механизма на вспомогательных работах затруднено, так как с помощью этого же механизма ведутся основные работы, на выполнение которых его периодически переводят. Это вызывает непроизводительные потери времени на переналадку подъемного механизма, увеличивая тем самым продолжительность очистки дна бассейна и уменьщая эксплуатационную производительность грейфера. Цель изобретения - повыщение пооизводительности грейфера путем автономного перемещения его с заданным шагом. Для достижения поставленной цели двухчелюстной грейфер для очистки дна ограниченных водных бассейнов с балочным перекрытием, содержащий раму с опорными стойками на концах и в центральной части, установленные в направляющих рамы каретки с челюстями и механизм смыкания челюстей, кине.матически связанный с приводом, размещенным на траверсе, соединенной с рамой стержневой фермой, снабжен закрепленными на траверсе с возможностью взаимодействия с балочным перекрытием аутригерами с упорами на выдвижных щтоках, щарнирно прикрепленными одними плечами к траверсе с возможностью взаимодействия с упорами аутригеров ступенчатыми рычагами, соединенным с другими плечами рычагов посредством тяг пневмоцилиндром и смонтированными на продольных стержнях фермы вблизи их нижних концов выдвижными наконечниками с горизонтальными пальцами, при этом каждая опорная стойка центральной части рамы выполнена с поперечным пазом, в котором расположены пальцы соответствующего наконечника. На фиг. 1 изображен грейфер без опорных стоек на концах рамы, общий в-ид; на фиг. 2 - то же, вид сбоку; на фиг. 3 - вид А на фиг. 2; на фиг. 4 - разрез Б-Б на фиг. 3; на фиг. 5 - разрез В-В на фиг. 1; на фиг. 6 - приведена схема пере.мещения грейфера в одном направлении. Грейфер содержит раму 1 с опорными стойками 2 на ее концах и стойками 3 и 4 в центральной ее части. В направляющих рамы 1 симметрично относительно вертикальной оси грейфера установлены подвижные вдоль нее каретки 5. С каретками 5 соединены с возможностью поворота в вертикальной плоскости, а также с возможностью возвратно-поступательного пере.мещения челюсти со скребками 6. Механизм смыкания челюстей включает отклоняющие блоки 7, установленные на раме 1, и гибкие тяги 8, охватывающие отклоняющие блоки 7 и связанные с каретками бис приводом 9. Привод 9 размещен на траверсе 10, соединенной с рамой 1 стержневой фермой, имеющей продольные стержни 11. На траверсе 10 закреплены аутригеры, каждый из которых представляет собой пневмоцилиндр 12 двухстороннего действия с укрепленным на его щтоке 13 посредством щарнира 14 опорным бащмаком 15. На траверсе 10 закреплен пневмоцилиндр 16, шток 17 которого кинематически связан через тяги 18 со ступенчатыми рычагами 19, щарнирно укрепленными на траверсе 10 с возможностью взаимодействия с упора.ми 20, смонтированными на штоках 13 пнев.мсщилиндров 12. На концах продольных стержней 11 фермы установлены выдвижные наконечники 21 с пальцами 22. Наконечники 21 щарнирно прикреплены к щтокам 23 пневмоцилиндров 24 одностороннего действия, смонтированных на концах продольных стержней 11 фермы. В опорных стойках 3 и 4 центральной части рамы 1 выполнены поперечные пазы 5 под пальцы 22. Над поверхностью водного бассейна, подлежащего очистке, расположено балочное перекрытие 26. Работа грейфера описана на примере очистки HiM дна бассейна выдержки кассет атомных реакторов. В этом случае балочным перекрытием 26 служит технологически предусмотренная фасонная крышка с перекрывающимися прорезями: центральной продольной и перпендикулярными ей поперечными. При этом габаритный размер грейфера по длине должен соответствовать ширине бассейна, габаритный размер рамы 1 по ширине - ширине ноперечной прорези С помощью грузоподъемного механизма грейфер с сомкнутыми челюстями опускают в крайнюю поперечную прорезь крышки бассейна. На некотором расстоянии от дна включают привод 9 и через посредство гибких тяг 8 каретки 5 перемещаются вдоль рамы 1, раскрывая челюсти грейфера. Далее грейфер опускают на дно и он, опираясь на опорные стойки 2-4, принимает устойчивое положение. При этом штоки 13 пневмоцилиндров 12 втянуты, штоки 23 пневмоцилиндров 24 выдвинуты, увеличивая тем самым за счет выдвинутых наконечников 21 длину продольных стержней 11 фер.мы, шток 17 пневмоцилиндра 16 втянут, упоры 20 не взаимодействуют со ступенчатыми рычагами 19. Грейфер отцепляют от грузоподъемного механизма. Включают привод 9 механизма смыкания челюстей и через посредство гибких тяг 8 каретки 5 начинают сближаться, а скребки 6 челюстей сгребают находящийся на дне бассейна материал. Возможность поворота челюстей в вертикальной плоскости, а также возможность возвратно-поступательного их движения позволяют собирать материал со дна бассейна, имеющего неровную поверхность, и предотвращают крощение частиц собираемого материала (фиг. 6, положение А - опорные реакции, действующие на стойки 2-4, одинаковы и равны R) После того, .как челюсти грейфера сомкнутся, необходимо переместить грейфер на расстояние, большее длины скребка. Для этого увеличивают давление воздуха в поршневой полости пневмоцилиндра 16, шток 17 его выдвигается и через тяги 18 поворачивает ступенчатые рычаги 19. Затем увеличивают давление воздуха в штоковых полостях пневмоцилиндров 12, штоки 13 втягиваются до тех пор пока упоры 20 не коснутся верхних ступеней ступенчатых рычагов 19. Далее в полости пневмоцилиндра 24, расположенного первым по направлению перемещения грейфера, снижают давление воздуха до атмосферного (фиг. 6, положение Б). Вследствие этого ферма под действием .момента силы тяжести поворачивается относительно оси пальца 22 дальнего по направлению перемещения грейфера выдвижного наконечника 21 стержня 11 до тех пор, пока опорные башмаки 15 не коснутся балочного перекрытия 26 (фиг. 6, положение В). При этом движение пальца 22 в пазе 25 снимает изгибающие моменты, действующие на продольные стержни 11 при повороте фермы. Затем увеличивают давление воздуха в порщиевых полостях пневмоцилиндров 12, их щтоки 13 выдвигаются на максимальную величину и грейфер вывешивается на балочном перекрытии 26, опираясь на него опорными башмаками 15. Стойки 2-4 рамы 1 отрываются от поверхности дна бассейна (фиг. 6, положение Г). За счет того, что опорная точка грейфера в этот момент смешена по горизонтали относительно его центра тяжести по направлению перемещения грейфера, последний перемещается на определенное расстояние от первоначального положения. Благодаря значительной величине сопротивления водной среды колебания грейфера будут сильно затухающими, вследствие чего довольно быстро центр тяжести грейфера и опорная точка окажутся расположенными на одной вертикали (фиг. 6, положение Д). Включают привод 9 и через посредство гибких тяг 8 челюсти грейфера раскрываются, собранн1 1Й материал высыпается на тот участок дна, который будет обрабатываться грейфером позже. После этого раскрытый грейфер перемещают аналогичным образом в обратном направлении, устанавливают его на опорные стойки 2-4 и скребками 6 челюстей собирают .материал, находящийся ранее на данном участке дна бассейна, а также высыпанный на него после предыдущего перемещения грейфера в прямом направлении. Причем, если для ограничения величины перемещения грейфера в прямом направлении служат верхние ступени ступенчатых рычагов 19, то для ограничения величины перемещения его в обратном направлении служат нижние ступени тех же рычагов 19. Суммарное перемещение грейфера в прямом направлении - шаг грейфера равен разности величин прямого и ооратного хода и не превышает длины скребка 6. Таким образом, скребки 6 челюстей грейфера обрабатывают всю поверхность дна бассейна. После последнего цикла работы грейфер с сомкнутыми челюстями при помощи грузоподъемного механизма извлекается из бассейна и собранный материаоТ высыпается в специальный контейнер. Предлагаемый двухчелюстной грейфер позволяет качественно проводить очистные работы без использования грузоподъемного механизма. При этом благодаря автоно.мному перемещению грейфера снижается время очистки бассейна приблизительно на I -1,5 сух, что позволяет увеличить на столько же эксплуатационное время грейфера и повысить таким образом его эксплуатационную производительность.
Б-Б
21

| название | год | авторы | номер документа |
|---|---|---|---|
| Двухчелюстной грейфер | 1981 |
|
SU1020357A1 |
| КРАН-МАНИПУЛЯТОР МЕТАЛЛОВОЗНЫЙ | 1998 |
|
RU2140367C1 |
| КРАН-МАНИПУЛЯТОР ЛЕСОВОЗНЫЙ | 1999 |
|
RU2169673C2 |
| Устройство для очистки дренажных колодцев | 1989 |
|
SU1701835A1 |
| КРАН-ПОГРУЗЧИК (ВАРИАНТЫ) | 2006 |
|
RU2317248C2 |
| ПОГРУЗЧИК | 2002 |
|
RU2230698C2 |
| Грейфер для рытья траншей | 1978 |
|
SU831908A1 |
| КРАНОМАНИПУЛЯТОРНАЯ УСТАНОВКА | 1999 |
|
RU2167803C2 |
| Транспортное средство для перевозки длинномерных грузов | 1978 |
|
SU766920A1 |
| УСТРОЙСТВО ДЛЯ СМЕНЫ СТРЕЛОЧНЫХ ПЕРЕВОДОВ | 2002 |
|
RU2230148C2 |


ДВУХЧЕЛЮСТНОЙ ГРЕЙФЕР ДЛЯ ОЧИСТКИ ДНА ОГРАНИЧЕННЫХ ВОДНЫХ БАССЕЙНОВ С БАЛОЧНЫМ ПЕРЕКРБ1ТИЕМ, содержащий раму с опорными стойками на концах и в центральной части, установленные в направляющих рамы каретки с челюстями и механизм смыII i кания челюстей, кинематически связанный с приводом, размещенным на траверсе, соединенной с рамой стержневой фермой, отличающийся тем, что, с целью повышения производительности, он снабжен закрепленными на траверсе с возможностью взаимодействия с балочным перекрытием аутригерами с упорами на выдвижных щтоках, щарнирно прикрепленными одними плечами к траверсе с возможностью взаимодействия с упорами аутригеров стуI пенчатыми рычагами, соединенным с другими плечами рычагов посредством тяг пневмоцилиндром и смонтированными на продольных стержнях фермы вблизи их концов выдвижными наконечниками с горизонтальными пальцами, при этом каждая опорная стойка центральной части рамы SS выполнена с поперечным пазом, в котором (Л расположены пальцы соответствуюп1,его наконечника. о 26 О5 СО со О5 
о
со
3
8
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Авторское свидетельство СССР по заявке № 3313337/11, кл | |||
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
