(5) ГРЕЙФЕР
| название | год | авторы | номер документа |
|---|---|---|---|
| Многочелюстной грейфер | 1988 |
|
SU1646979A1 |
| Грейфер для бревен | 1988 |
|
SU1548152A1 |
| Двухчелюстной грейфер | 1981 |
|
SU1020357A1 |
| Двухчелюстный грейфер | 1974 |
|
SU527367A1 |
| Грейфер | 1980 |
|
SU954356A1 |
| Многочелюстной грейфер | 1982 |
|
SU1070114A1 |
| Двухчелюстной грейфер для очистки дна ограниченных водных бассейнов с балочным перекрытием | 1983 |
|
SU1076396A1 |
| Одноканатный грейфер | 1984 |
|
SU1181978A1 |
| ГРЕЙФЕР СФЕРИЧЕСКИЙ | 2011 |
|
RU2469947C1 |
| Одноканатный грейфер | 1982 |
|
SU1052472A1 |
1
Изобретение относится к подъемнотранспортной технике, в частности к грейферам.
Известен грейфер, содер)кащий портальную раму, ш.арнирно соединенные с ней челюсти в виде двуплечих рычагов и расположенные на стойках рамы приводные механизмы смыкания челюстей, включающие подвижные звенья flj.
Однако такое конструктивное решение грейферного механизма не позволяет значительно снизить удельную металлоемкость, так как величина момента сил сопротивлений зачерпыванию, действующих на каждую челюсть такого грейфера, изменяется в очень незначительных пределах и может быть принята за постоянную величину. Согласно третьему закону Ньютона - закону равенства действия и противодействия - момент действующих сил равен моменту сил сопротивления (без учета сил инерции, которые приблизитель
НО равны 0). Момент действия сил Мл равен:
% где FQ - сила, развиваемая каждым
гидроцилиндром механизма
смыкания челюстей и действующая на соответствующую челюсть;
С - длина плеча этой силы отно, сительно оси поворота челюсти.
Так как в процессе Поворота челюсти на угол, больший 90, длина плеча & f const, а изменяется (приблизительно )1., то сила-F, развиваемая каждым гидроцилиндром, является также непостоянной величиной, т.е. Fq- Var (приблизительно
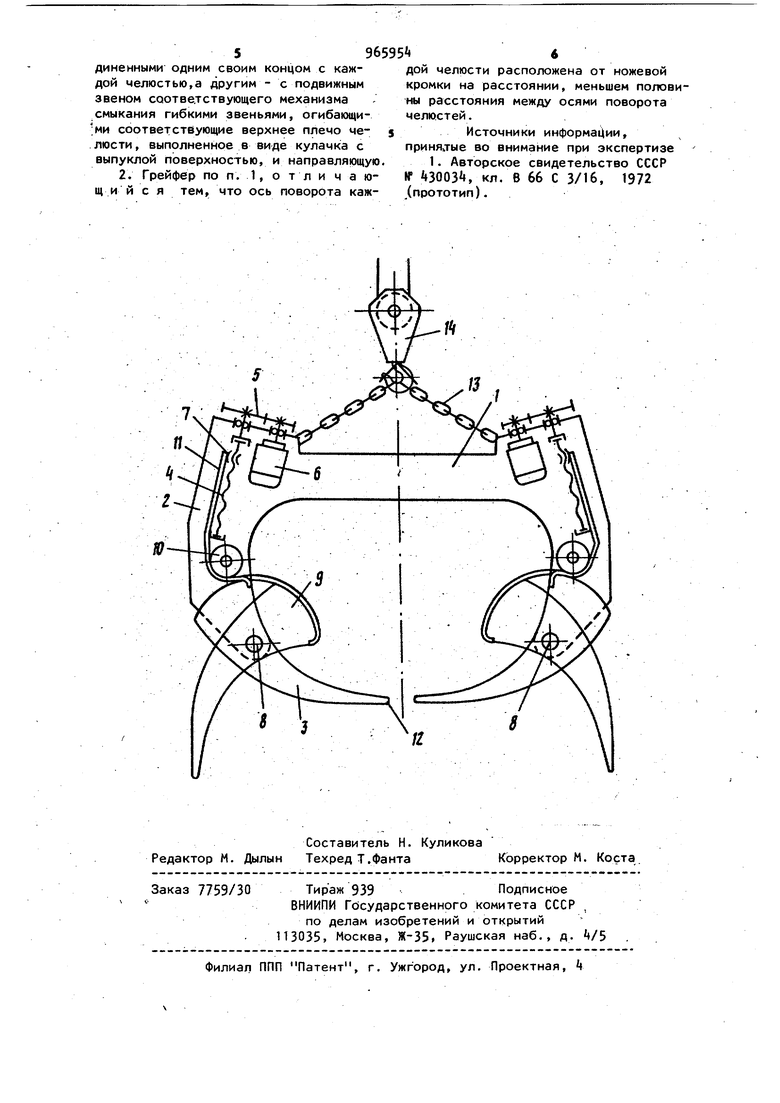
9f Р создании грейферов такой конструкции расчеты на прочность челюстей, а равно и других несущих звеньев грейфера, на которые также действуют силы F, развиваемые механизмом смыкания челюстей, ведутся по максимальному их зна чению. Следствием этого является нежелательная значительная удельная мё таллоемкость такого грейфера. Цель изобретения - снижение удель ной металлоемкости грейфера. Поставленная цель достигается тем что грейфер-снабжен размещенными в. нижней части стоек рамы направляющими и соединенными одним своим концом с каждрй челюстью, а другим - с подвижным звеном соответствующего механизма смыкания гибкими звеньями, . огибающими соответствующие верхнее плечо челюсти, выполненное в виде кулачка с выпуклой поверхностью, и направляющую. . . , Кроме того, ось поворота каждой, челюсти может быть расположена ot . ножевой кромки на расстоянии, меньшем половины расстояния между осями поворота челюстей. На чертеже изображен предложенный грейфер. Грейфер содержит портальную раму со стойками 2, шарнирно прикрепленные к стойкам 2 челюсти 3 и механизм смыкания челюстей. Механизм смыкания челюстей 3 включает винт 4, приводимый в движение через зубчатую переда чу 5 электродвигателем 6, и гайку 7 с корпусом. Челюсти 3 представляют собой двуплечие рычаги с осями 8 поворота, причем верхние плечи рычагов выполнены в виде кулачка 9 с выпуклой поверхностью. На нижней части каждой стойки укреплены направляющие: 10. К верхнему плечу каждой челюсти 3 прикреплено одним концом гибкое звено 1 1 - стальной канат, охватывающий поверхность кулачка 9 при открывании и смыкании челюстей. Далее гибкое зве но 11, огибая направляющую 10, вторым концом прикреплено к корпусу гайки 7. При этом ось гибкого звена 11 плавно сопряжена с продольной осью гайки 7. Расстояние от оси 8 поворота каждой из челюстей 3 до ножевой кромки 12 этой челюсти меньще половины расстояния между осями 8 поворота обеих челюстей. Грейфер подвешен на гибких тягах 13 к крюковой обойме 1А крана. Грейфер работает следующим образом. Грейфер с раскрытыми челюстями 3 опускают на материал и включают элект родвигатель 6. Гайка 7 передвигается вверх по винту , перемещая конец гибкого звена 11. Гибкое звено 11, огибая направляющую 10 и поверхность кулачка 9 поворачивает челюсти 3 относительно осей 8. Челюсти 3 смыкаются, забирая материал. Высыпание груза из грейфера производится при вращении винта Ц в обратную сторону. Челюсти 3 под действием собственного веса и веса материала поворачиваются относительно осей 8 и занимают исходное для зачерпывания положение. Благодаря гибкой связи между челюстью и подвижным элементом механизма смыкания челюстей длина плеча силы, развиваемой механизмом смыкания челюстей и действующей на челюсти, остается приблизительно постоянной величиной. Поэтому в данной конст- рукции величинаэтой силы варьируется -в весьма незначительных пределах. Это дает возможность избежать перегрузок, а.при создании реальных конструкций таких грейферов расчеты на прочность челюстей и других несущих звеньев производить по относительно меньшим, чем в прототипе, значениям действующих сил fx . Следствием этого является мейьшая удельная металлоемкость предлагаемых грейферов. Кроме того, выполнение расстояния от оси поворота челюсти до ее ножевой, кромки меньшим половины расстояния между осями поворота противоположных Челюстей обеспечивает минимально возможную длину челюстей. Это снижает момент сил сопротивлений зачерпыванию, а соответственно нагрузку на челюсти и, таким образом, также уменьшает удельную металлоемкость грейфера. Помимо этого, этрт признак позволяет получить переменную площадь зева, способствующую лучшему обжатию грузов различной конфигурации и с различной площадью поперечного сечения. Формула изобретения 1. Грейфер, содержащий портальную раму, шарнирно соединенные с ней челюсти в виде двуплечих рычагов и расположенные на стойках рамы приводные механизмы смыкания челюстей, включающие подвижные звенья, о т личающийся тем, что, с целью снижения удельной металлоемкости, он снабжен размещенными в нижней части стоек рамы направляющими и сое
