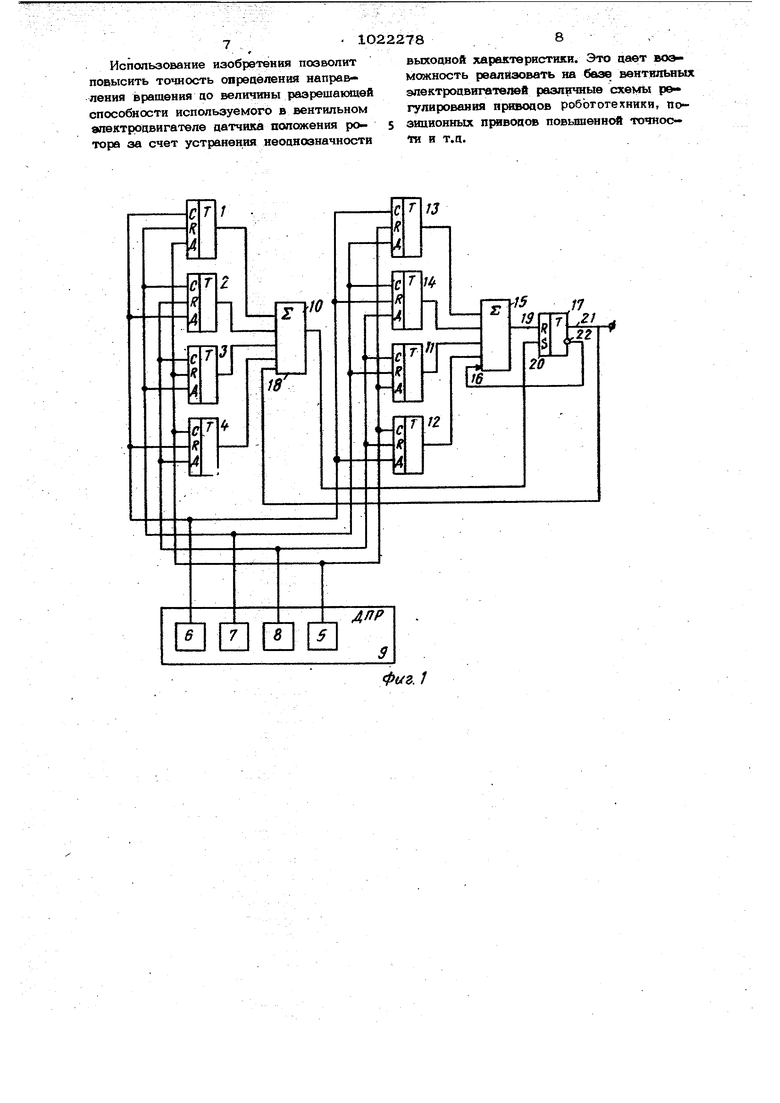
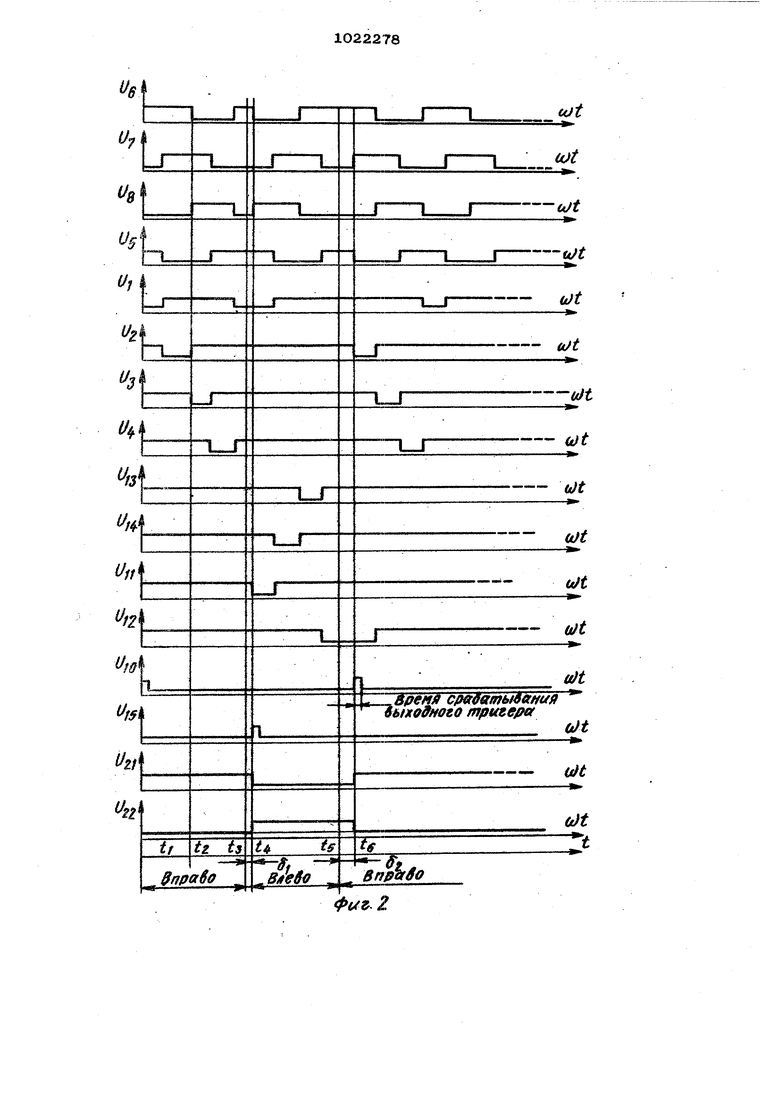
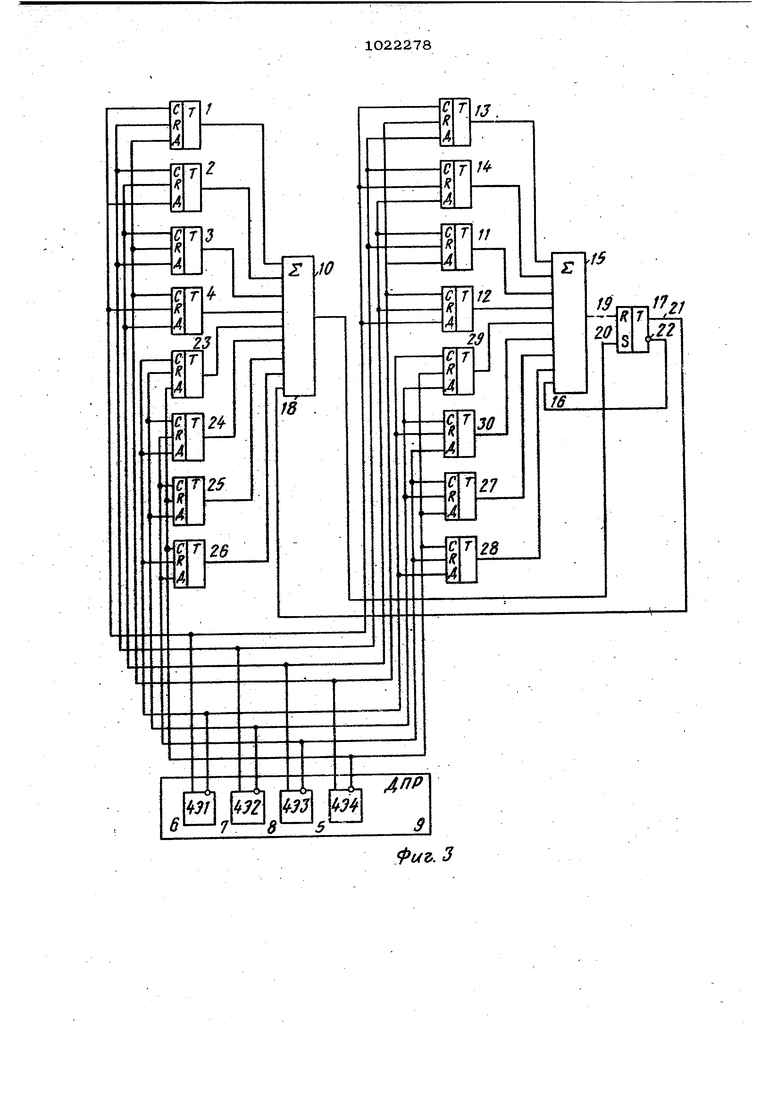
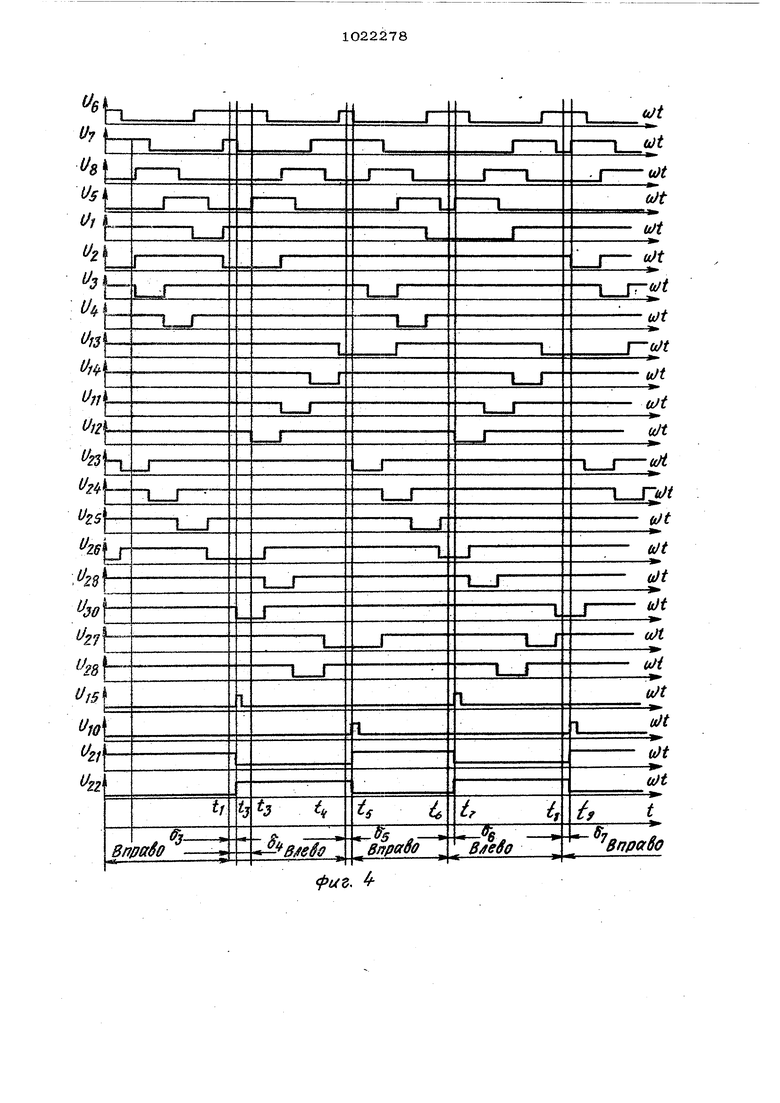
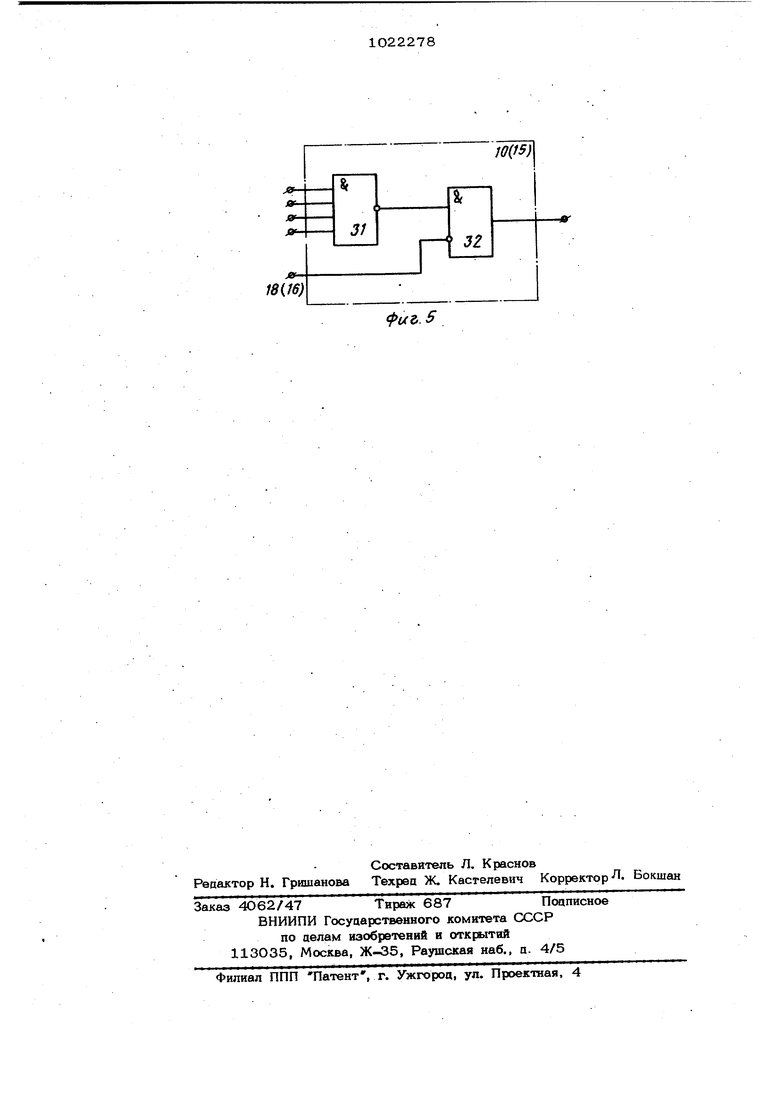
11 Изобретение относится к электротехнике, в частности к электропривоау, и мо жет быть использовано для получения инфо яиацин о направлении вращения вен- тильйого электроавигателя и в устройствах цля зашиты электродвигателей от неправильного направления вращения. Известно устройство для определения направления вращения, выполненное на базе вентильного электродвигателя, содержащее в общем случае синхронную мащину, m -чгекционная обмотка которой подключена к коммутатору на ГП тран- . зисторах, каждый из которых включен в диагональ выпрямительного моста. Транзисторы коммутатора управляются от чувствительных элементов датчика положения ротора jQ , Недостатком такого датчика является его сложность, вызванная необходимость введения в его функциональную схему ил синхронной мащины, или дополнительной обмотки в синхронную машину вентильного электродвигателя. Наиболее близким к изобретению является устройство для определения направления вращения вентильного электродвигателя, содержащее первую группу D -триггеров, в когаместве равном числу m каналов датчика положения ротора вентильного электродвигателя, выходы В-триггеров поаключены к входам первого логического cyMMaTppai в каждой D-три гере информационный вход подключен к прямому выходу одноименного канала датчика положения ротора, а входы Трактуемый и VcTaHOBKa нуля подключены к прямым выходам сявцунзоисс по направлению вращения (И+1)-го и ()-4го каналов датчика положения ротора соответственно 2 , Недостатком известного устройства является низкая точность, вызванная неоднозначностью выходной харгистертсти ки при различных реально существующих режимах работы. Цель изобретения повышение точности за счет уст(анения неоднозначности выходной характеристаки. Поставленная цель достигается тем, что устройство для определения направления вращения вентильнснч) электродвигателя, содержащее первую группу 0-три геров, в количестве равном числу упквяа лов датчика положения ротора вентильно электродвигателя, выходыВ риггерсш подключены щ, входам пегого логическо го сумматора, в каждом)-триггере информацисвшый вход подключен к прямому 78 выходу соответствующего п -го канала датчика положения ротора, а входы Тактируемый и Установка нуля подключены к прямым выходам (П+1)-го и (П+2)о каналов датчика положения, ротора соответственно, дополнительно снабжено второй группой изшЮ- риггеров, вторым управляемым логическим сумматором с Ш входами и выходным триггером, а перм вый логический сумматор выполнен с управляющим входом, в каждомD-триг гере второй группы информационный вход подключен к прямому выходу соответ ствующего И -го канала датчика положения ротора, а входы Тактируемый и Установка нуля подключены к прямым выходам (n-l)-ro и (п-2)-го канала датчика положения ротора соответственно, выходы D-триггеров второй группы подключены к входам второго управляемого логического сумматора, выход которого подключен к входу Установка нуля выходного триггера, к входу Установка единицы icoTOporo подключен выход первого логического сумматора, управляющие входы первого и второго логических сумматоров подключены соответственно к прямому и инверсному .выходам выходного триггера. Устройство дополнительно снабжено третьей и четвертой группами, состоящими каждая изlnD-триггеров, каждый логический сумматор снабжен m допо/шительными входами, а каждый канал датчика положения ротора выполнен с инверсным выходом, выходы D - триггеров третьей и четвертой групп подключены к инверсным выходам каналов датчика положения ротора аналогично подключению.их прямых выходов к входам О -триггеров первой и второй групп соответственно, выходы D-триггеров третьей и четвертой групп подключены к дополнителЕшым входам первого и второго логических сумматоров соответственно. На фиг 1. представлена функциональная схема устройства аля определения направления вращения с двумя группа. ми 13-триггеров; на фиг. 2 - эпюры напряжений, поясняющие работу устройства с двумя группами;D-триггеров, на фиг. 3 - функциональная схема уст ройства с четырьмя группамиТЗ-тригеrepC)Bj на фиг. 4 - эпюры напряжений, псжснякяцне работу устройства с четырьмя группами триггеров; на фиг. 5 пример вьшолнения логического сумматора. Устройство цля опрецеления направления вращения вентильного электроцвигателя (фиг. 1) содержит первую группу D-триггеров 1 - 4, в количестве равном числу m каналов 5-8 цатчика 9 положения ротора вентильного электродвигателя, .выхоцыВ-триггеров поаключень -к вхоцам первого логического сумматора Ю, в каждом Б-триггере (1 - 4) информационный)-вход пооключен к прямом выходу одноименного П-го канала 5-8 датчика 9 положения ротора, а входы Тактируемый - С и Установка нуля R подключены к прямым выходам следующих по направлению вращения (|1-ь1)го (6,7,8 и 5) и (n+2).fo (7,8,5 и 6) каналов датчика 9 положения ротора соответственно. Устройство также снабжено второй группой из Б -триггеров И - 14 вторым логическим сумматором 15 с И1 входами и управляющим входом 16 и выходным триггером 17, а первый логический сумматор Ю выполнен с управляювш входом 18, в кaждo 4- D -триггере 11 - 14 второй группы информационный подключен к прямому выхсжу одноименного fl-гчэ канала 5г8 датчика 9 положения ротора соответственно, выходы 1)-|Трип7еров 11 - 14 второй группы под ключены к входам .второго управляемого логического сумматора 15, выход кото-, рого подключен к вxoдV /Установка нуля l9 выходного. триггера, к входу Уста нбвка единицы- 5 2О которого поохлючен выход пе{жогч жя вческого су лмагора Ю, управляющие входы 18 и 16 первого 10 и второго 15 логических cyi MatopOB подключены к прямому 21 в вявареному 22 выходам выхоаного триггера 17, ОД1Ш из которых, sanjieMep, прямой 21 является выходом устройства для (опреде/юння направления вращение. Устройство для опрэделеняя направления вращения (фнг. 3), кроме того, со дервкнт третью н четвертую группы, со стоящие каждая взВ-траггеров 23-26 и 27 - ЗО соответственно, а 1саждый лошческнй сумматор снв&«:ен; дополн телшымн входами,- выходыБфрвггеров 23 - 26 и четвертой 7 - ЗО групп подключены .к ннввраай| г выходам каналов 5-8 датчика 9 полсякения ротора аналогично подключению вх првмых выходов к входамБ «триггеров йерв( 1 4 и второй 11 « 14 групп соответствен но, выхоаыВ-тряггеров третьей 23 - 26 и четвертой 27 - ЗО групп ;подключвны. к дополнительным входам первого 1О и второго 15 лсигических с маторо0 со- ответственно. Каждый логический сумматор включает в себя многовходовой логический элемент И-НЕ 31 (фиг. 5) и логический элемент И 32 с одним инверсным входом, являющимся управляю щим входом логического сумматора. Устройство для определения напревления вращения вентильного электродвигателя работает следующим образом. Для примера рассмотрим работу уст ройства, определяющего направление вра« щения вентильного электроовигателя с четырехканальным датчиком положения ро тора, вырабатывающего сигналы алвп«льностью и скрещенными на угол И /2 . При направлении вращения ввнтшплого электродвигателя, напртмер, вправо на интервале времени i;, - tl, датчик 9 положения ротора вырабатывают такую последовательность импульсов U , Ug, tl-j, идХфиг. 2), при которой провсхоаит по- 5шлен 1е нулевого потенпюла на всех, например, инверсных выходах)- григге- ров 1 - 4. TeaSf например, в времени i пдд. действием положительного фронта сигнала Ug кашша 8 датчика 9 положения ротора на выходе }-ггриггера 3 устанавливается потешшал логтгаеского нуля, так как на его информа1ШО1ш м D -входе вмел место положительный потшшиал с канала 7 датчика 9 положения ротора. Аналогично переключаются и оо тальныеР-триггерял 2-4. Появление отртцатвльных импульсов Uii на выходах1} рЕ1Ггвров 1-4 coofneffn ствует направлению вращения 9ватвяьааг9 электрооввгателя вправо, «тому же направлению вращения соответствует и положительный потенциал выходе 21 выходного триггера 17. При Езмевенвв направления вращения в момент времени i взмешются порядок следования импульсов с оатчика 9 положения ротора. При последовательности импульсов с датчика 9, соответствупшей измененному левому направлению вращения на инте{я«ле времени t.-ic« на выходах D-rrpcrre ров 11, 12, 15 и 14, инверсных, поочередно появляются импульсы и«, и 12 , U,t, . РабоraD-ориггеров 11 - 14 второй группы происходит аналогично работе D-триггвров 1-4 пе1юой группы. На логическом сумматоре 15 происходит суммирование отртцательных импульсов сБ-триггеров 11 - 14, так как на его управляющем входе 16 до момента времени t вмел место .уровень логическаго нуля. Работа логического сумматоpa lO или 15 происходит по законам цифровой логики. В момент времени ij на выхоае логического сумматора 15 появляется положительный уровень U 5 под действием срабатывания 0-триггера 1 Этот уровень вызывает переключение выходного триггера 17 и на его выходе 21 установится урювень логического нуля, а на выходе 22 установится уровень логгической единицы ( ). На управляющем входе 16 логического сумматора 15 появится уровень логичеокой единицы, при этом будет прекращено прохождение информации суммирования на выход логического сумматора 15, При изменении направления вращения слева направо в момент -времени i 5 отрицачельные импульсы снова поочередно будут появляться на выхоцах Б-трипгеров 1-4 первсЛ группы. На управляю щем входе 18 логического сумматора 10 имеет место уровень логического нуля до момента времени tz. При появлении первого отрицательного импульса на оцном изС-триггеров 1-4 первой группы например О-триггера 2, в момент времени i и при наличии разрещающего уров логического нуля на входе 18, поги- ческий сумматор Ю вырабатывает уровен логической единицы ( Um). Выходной триг iO гер 17 переключается и на выходе 21 устанавливается уровень логической единицы, а логический сумматор Ю прекращает подачу переключающего импульса Ufg Введение обратных связей с выходов выхоцного триггера 17 на управляющие вхо ды логических сумматоров 10 и 15 позволяет исключить недопустимый режим работы выходного триггера, когда за счет разных времен срабатывания на выходах логических сумматоров Ю и 15 могли иметь место одновременно два уровня логической единицьь Переключение выходного триггера 17 (фиг. 2) происходит с погрешностями о относительно истинного момента смены направления вращения. Однако кгикцая из н не будет превышать 5 (|. ОпределяетОт;„ значением разрещающей способно- сти датчика 9 положения ротора, исполь зуемого в данном примере-Опцц / На фиг. 3 показан пример реализации устройства для определения направления вращения, позволяющий получать инфорнмацию о направлении вращения с однознан ной и минимальной погрешностью при использовании датчика положения ротора, вырабатывающего сигналы цлительно10786 стью Зйу 4 1 смещенные относительно друг друга на угол , т.е. датчика, у которого изменение направления вращения может происходить при различных сочетани ях сигналов в каналах. Устройство для определения направления вращения, показанное на фиг. 3, отличается от устройства, изображенного на фиг. 1, наличием третьей и четвертой группы)-триггеров 23-30. Они необходимы для сохранения однозначности погрешности определения направления вращения при неоднозначном срчетании сигналов U с, Ц , U-у, (Jg . 4) в каналах датчика положения ротора в момент реверса. Для этого их входы связаныС инверсными выходами каналов 5-8 датчика 9 положения ротора . Сигналы 4 и (1/ j-U/2 яа выходах D-триггеров 1-4 и 23-26 первой и третьей групп вырабатываются при направлении вращения вертикального электродвигателя вправо. Эти сигналы смещены друг относительно друга на угол1 4-. Аналогично сигналы ( 4 на выходах D-триггеров 11-14 и 27-30 второй и четвертой групп вырабатываются при левом направлении вращения. Эти сигналы смещены друг относительно дру- га на уголi /4 . Такое смещение сигналов позволяет сохранить погрешность однозначной и минимальной для данного типа датчика 9 положения ротора. Так, например, в момент временив2 появляется сигнал наО-триггере ЗО четвертой группы, посредством которого на выходе аатчика направления вращения измeняeIw ся информация. Если бы этот тип цатчц- ка положения ротора бьй использован с устройством для определения напряжения вращения, изображенным на фиг. 1, то смена информации после реверса (Ц) произошла бы только в момент времени ty когда сработает D-триггер 12 второй группы. Из эпюр напряжения (фиг. 4) видно, что использование устройства для определения направления вращения (фиг. .3) позволяет с однозначной и наименьшей погрешностью, не преБьш1ающей разрешающей способности датчика положения ротора, определить направление вращения. Погрешность, при этом будет определяться, г 5 б - пипВ данном случае разрешающая способность датчика 9 положения ротора ра&«e5mi«-- /4.
Использование изобретения позволит повысить точность определения направления вращения цо величины разрешакяцей способности используемого в вентильном впектррцвигателе цатчика положения ротора за счет устранения неоцнозначности
выходной характеристики. Это дает возможность реализовать на базе вентильных электродвигателей различные схемь регулирования пршодов робототехники, позиционных приводов повышенно точности и т.д.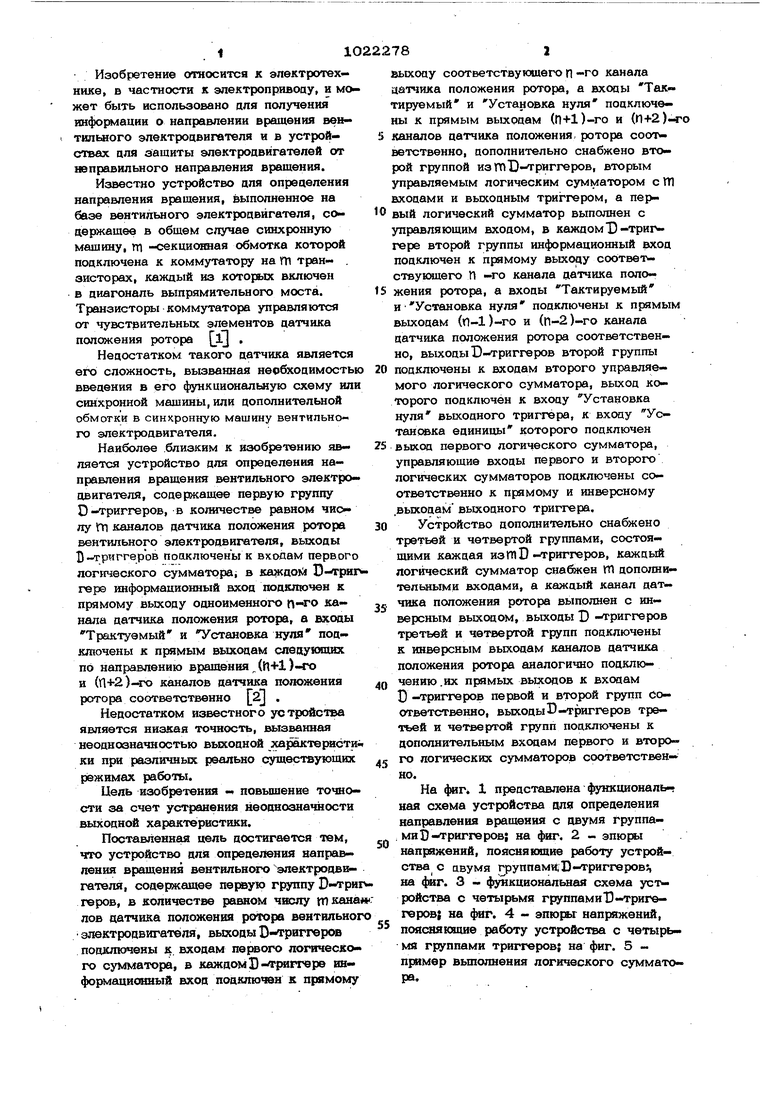
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения направления вращения вентильного электродвигателя | 1981 |
|
SU1022277A1 |
| Устройство для управления вентильным электродвигателем | 1983 |
|
SU1166255A1 |
| Устройство для управления вентильным электродвигателем | 1984 |
|
SU1259462A1 |
| Вентильный электродвигатель | 1985 |
|
SU1259430A1 |
| Устройство для определения направления вращения вентильного электродвигателя | 1984 |
|
SU1252901A1 |
| Вентильный электродвигатель с токовым регулированием | 1989 |
|
SU1677807A2 |
| Устройство для управления вентильным электродвигателем | 1985 |
|
SU1277342A2 |
| Устройство для управления вентильным электродвигателем | 1985 |
|
SU1302413A2 |
| Моментный вентильный электродвигатель | 1988 |
|
SU1751836A1 |
| Вентильный электродвигатель | 1987 |
|
SU1508318A2 |
1. yCTPC toTBO ОЛЯ ШРЕдаЛЕНИЯ НАПРАВЛЕНИЯ ВРАЩЕНИЯ ВЕНТИЛЬН Ж ЭЛЕКТРОДВИГАТЕЛЯ, оодернсашее первую группу СЧтригтеров, в количестве, равн(мд числу m кавалсш дат чшса положения ротора вентил1яого электродвигателя, выходы D tBrrepOB подключены к вкоаам первого логического сумматора, в каждом Р «триггере инфор мапионный вход подключен к прямому выходу соответствующего П -г р канала датчика положения, ротора, а входы; ГГактируемый и Установка нуля подключены к прямым выходам 
Фыг. /
Фие Z
Фиъ, 3
фиг,
18(16)
(put.S
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| УСТРОЙСТВО для ПЕРЕВОДА НАГРУЗКИ С ОДНОГО ГЕНЕРАТОРА ПОСТОЯННОГО ТОКА НА ДРУГОЙ | 0 |
|
SU283378A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Разработка систем элехтропр воца для органов управления подвижного объекта | |||
| Отчет МЭИ, rob | |||
| Санный велосипед | 1924 |
|
SU1396A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Дорожная спиртовая кухня | 1918 |
|
SU98A1 |
