Изобретение относится к электротехнике, в частности к электроприводу, и может быть использовано для получения информации о направлении времени вентил ного электродвигателя и в устройствах для заишты электродвигателей от неправильного направления вращения. Известно устройство дня определения направления вращения, выполненное на базе вентильного электродвигателя. Оно содержит в общем случае синхронную машину, m - ;екционная обмотка которой под ключена к коммутатору на m -транзисторах, каждый из которых включен в диагональ выпрямительного моста. Транзис- торы коммутатора управляются от чувствительных элементов датчика положения ротора i. Недостатком такого устройства является его сложность, вызванная необходи- мостью введения в его функциональную схему или си нхронной машины, или дополнительной обмотки в синхронную машину вентильного электродвигателя. Наиболее близким к изобретению является устройство для определения направления вращения вентильного электродвигателя, содержащее первую группу П -три геров, в количестверавном числу m каналов датчика положения ротора вентильного электродвигателя, выходы D -триггеров подключены к входам первого логического сумматора, в каждом Р -триггере информационный вход подключен к прямому выходу одноименного П -го канала датчика положения ротора, а входы Тактируемый и Установка нуля подключены к прямым выходам следующих по направлению вращения (п+1)-го и )-го канала датчика положения ротом соответственно 121. Недостатком известного устройства является то, что лишь в одном случае при смене информация на выходе логичес кого сумматора с нулевого сигнала на единичный сигнал ошибки о не превыша ет разрешающей способности датчика положения ротора (o Otnif) При смене информации на выходе логического суммато ра с единичного сигнала на нулевой сигнал ошибки возрастает в три раза((|| Для режимов реверса сигнал ошибки не превышает удвоенной величины разрещакнцей способности датчика положения ро Topa(S 2Sni4n)- Таким образом, ыедостаткюд известно го устррйства является низкая точность, вызванная неоднозначностью выходной ха рактеристики при различных реально существующих режимах работы. Цель изобретения - повышение точности за счет устране1тя неоднозначности выходной характеристики. Поставленная цель достигается тем, что в устройство для определения направления вращения вентильного электродвигателя, содержащее многовходовой логический сумматор и первую группу D -тригеров в количестве, равном числу т каналов датчика положения ротора вентильного электродвигателя, в каждом Г) -м D-триггере информационный и тактируемый входы подключены к прямым выходам -го и (п + 1)-го каналов датчика положения ротора соответственно, один из выходов каждого Т) -триггера подключен к соответствующему входу логического сумматора, выход которого является выходом устройства, дополнительно введены на каждый D -триггер две логические схемы совпадение), а каждый канал датчика положения ротора выполнен с инверсным входом, к входу Установка нуля п -го Б -триггера подключен выход первой логической схемы совпадения, первый вход которой связан с инверсным выходом другого D -триггера, а второй вход пошслючен к выходу второй логической схемы совпадения, первый вход которой подключен к прямому выходу собственного D-триггера, а второй вход - к инверсному выходу (И+1)-го канала датчика положения ротора. Кроме того, первый вход первой логи-, ческой схемы совпадения П -го О -триггера подключен к инверсному выходу (П+1) -го D -триггера. Устройство Дополнительно снабжено второй группой из ГП D-триггерЬв и на каждый из указанных D -триггеров двумя логическими схемами совпадения, а логический сумматор снабжен дополнительными m входами, в каждом ri -м О-триггере второй группы информационный вход подключен к прямому выходу П-го канала датчика положения ротора, тактируемый вход - к инверсному выходу Ш-1 )-го канала датчика положения ротора, а вход Установка нуля - к выходу первой дополнительной логической схемы совпадения, первый вход котороВ подключен к инверсному выходу П -го D-триггера первой группы, а вторсй вход к выходу второй дополнительной логической схемы совпадения, первый вход которой подключен к прямому выходу собственного D -триггера, а второй вход - к прямому выходу (H-l )-го канала датчика положения ротора, один из вы. ходов каждого О -триггера второй группы подключен к соответствукшему дополнительному кзюцу логического сумматора, а первый вход первой логической схемы совпадения п -го Б -триггера первой группы подключен к инверсному выходу (H + l)-roD -триггера группы.
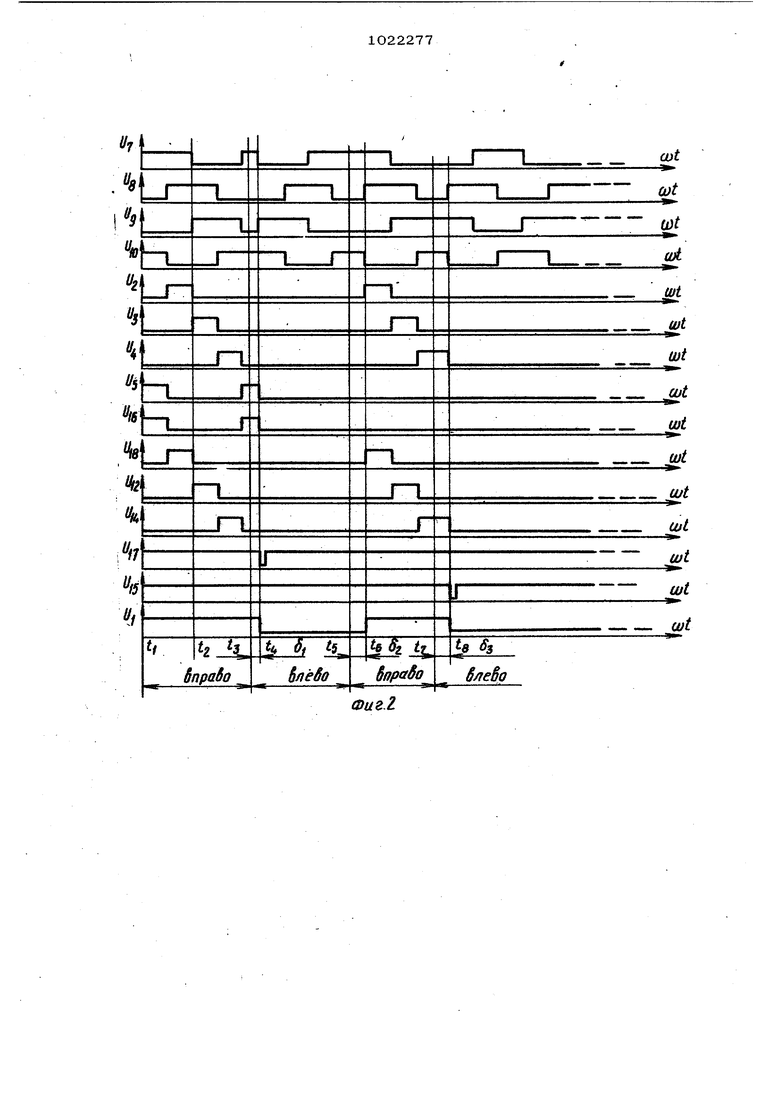
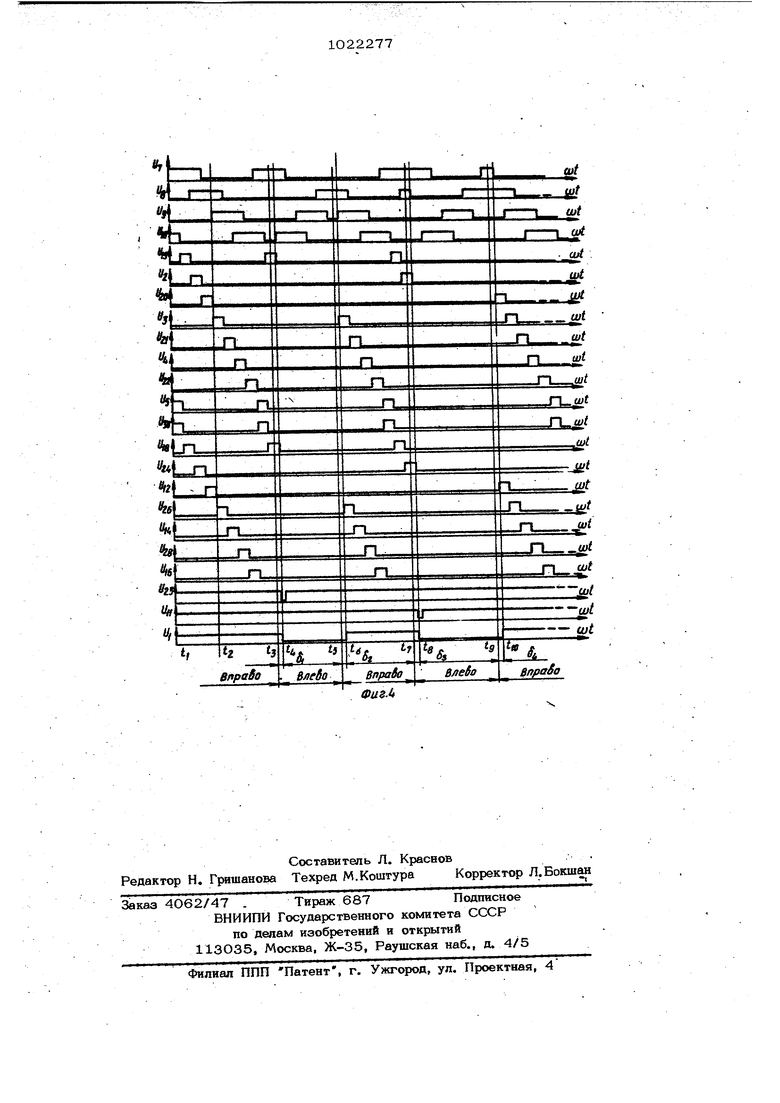
На фиг. 1 изображена схема устрЫ1ства с одной группой D -триггеров; на фиг.2 эпюры напряжений устройства, представ ленного на фиг. 1; на фиг. 3 - схема устройства с двумя группами D -триггеров; на фиг 4 - напряжений устройства, представленного на фиг. 3.
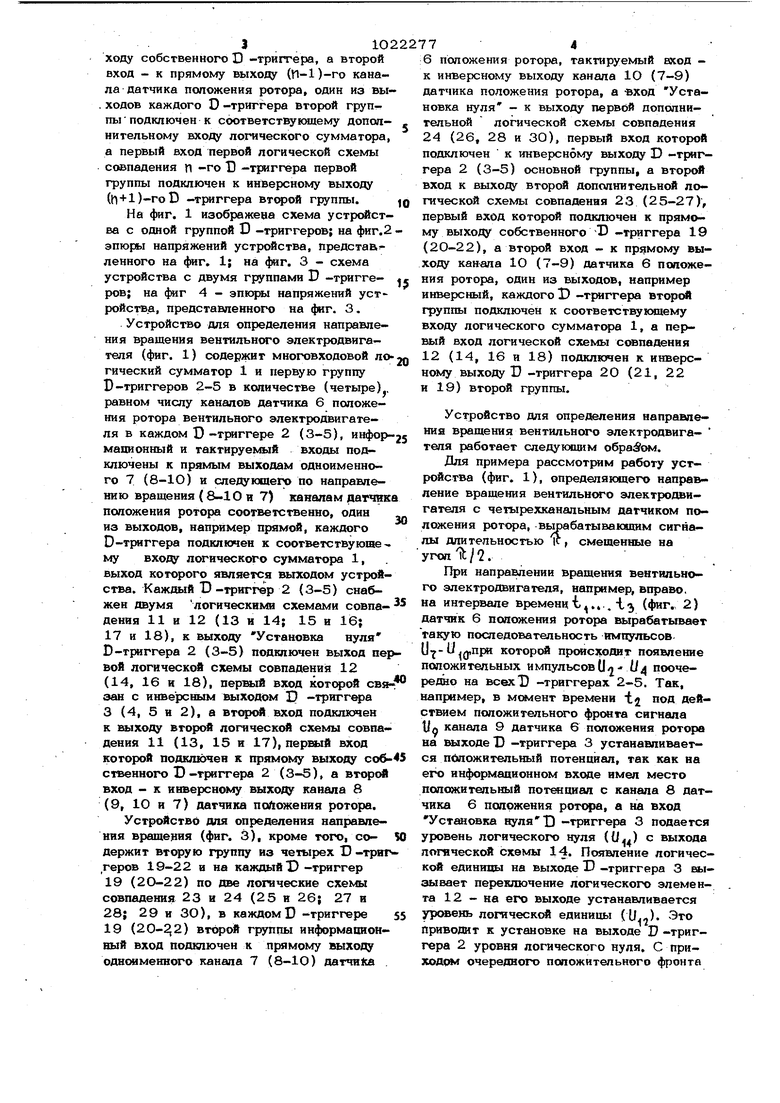
Устройство для определения направления вращения вентильного электродвигателя (фиг. 1) содержит многовходовой погический сумматор 1 и первую группу D-триггеров 2-5 в количестве (четыре) равном числу каналов датчика 6 положения ротора вентильного электродвигателя в каждом D -тртггере 2 (3-5), информапионный и тактируемый входы подключены к прямым выходам одноименного 7 (8-1О) и следующего по направлению вращения (8-10 и 7) каналам датчик положения роторе соответственно, один из выходов, например прямой, каждого D-триггера подключен к соответствующему входу логического сумматора 1, выход которого является выходом устройства. Каждый D -триггер 2 (3-5) снабжен двумя логическими схемами совпадения 11 и 12 (13 и 14; 15 и 16; 17 и 18), к выходу Установка нуля D-триггера 2 (3-5) подключен выход первой логической схемы совпадения 12 (14, 16 и 18), вход котсч5ой свяэан с инверсным выходом D -триггера 3 (4, 5 и 2), а второй вход подключен к выходу второй логическЫ) схемы совпадения 11 (13, 15 и 17), первый вход которой подключен к прямому выходу собственного D-триггера 2 (3-5), а вторЫ вход - к инверсному выходу канала 8 (9, 1О и 7) датчика положения ротора.
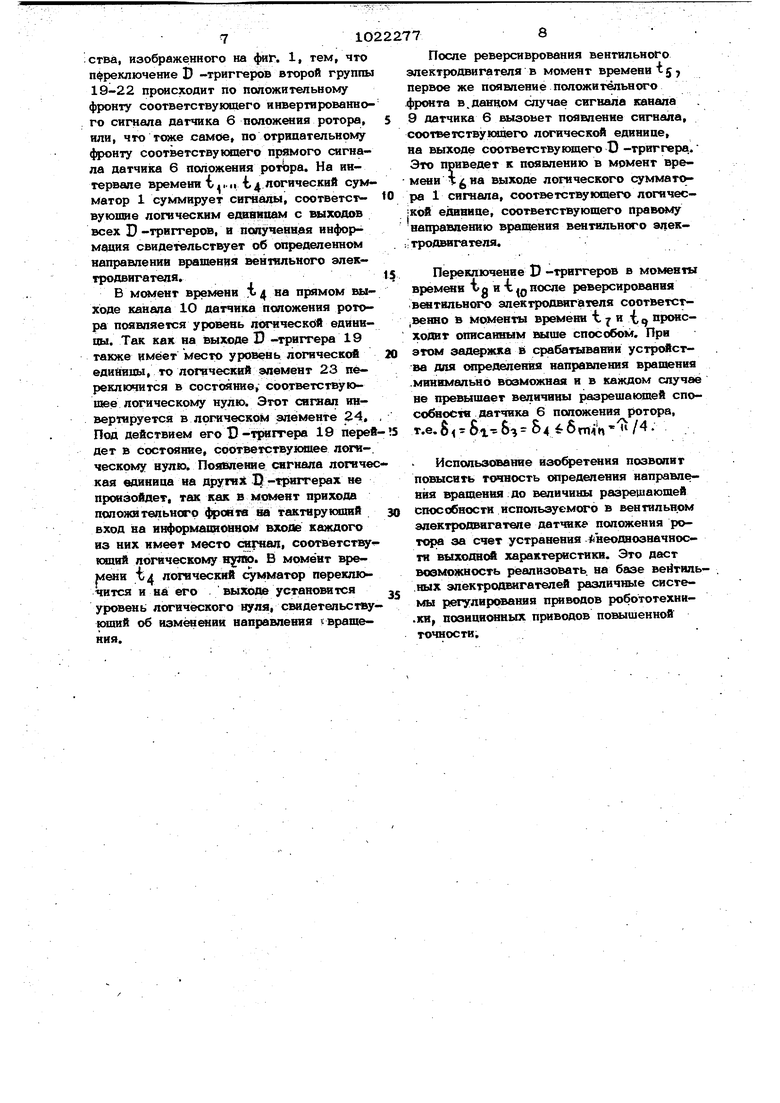
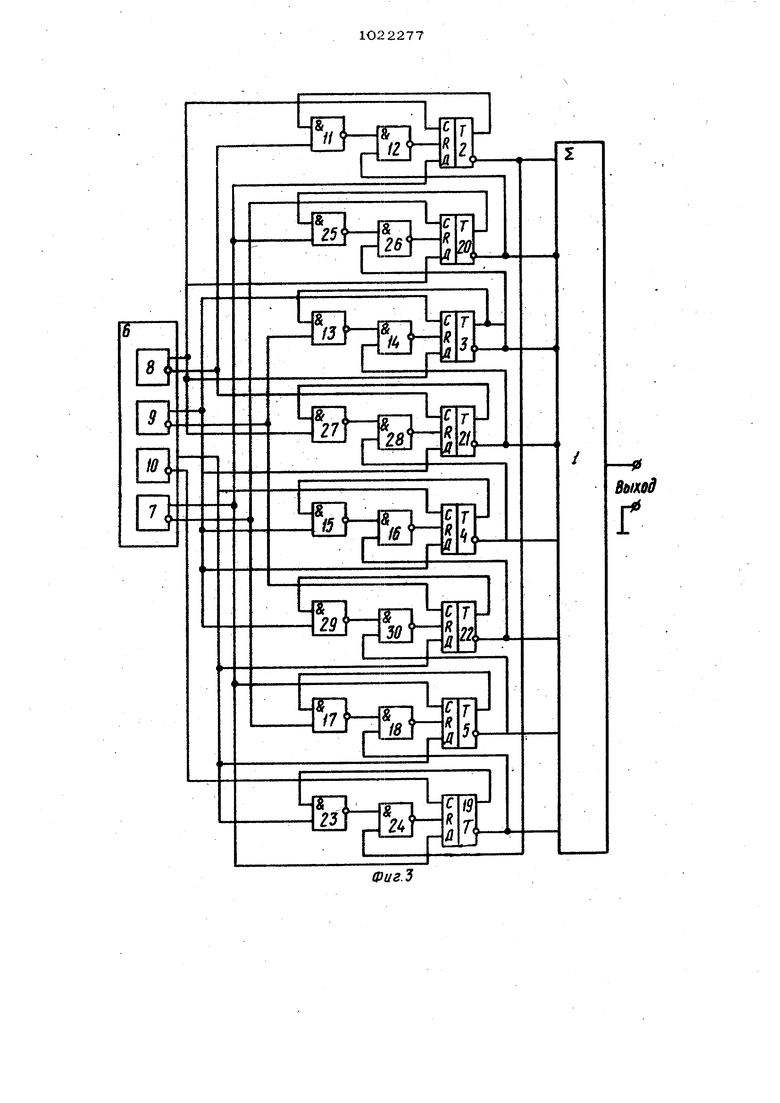
Устройство для определения направления вращения (фиг. 3), кроме того, содержит вторую группу из четырех D -триггеров 19-22 и на каждый D-триггер 19 (2О-22) по две логические схемы совпадения 23 и 24 (25 и 26; 27 и 28; 29 и ЗО), в каждом D -триггере 19 () группы информационный вход подключен к прямому выходу одноименного канала 7 (8-1О) датчика
6 положения ротора, тактируемый вход к инверсному выходу канала 1О (7-9) датчика положения ротора, а -вход Установка нуля - к выходу первой дополнительной логической схемы совпадения 24 (26, 28 и 30), первый вход которой подключен к инверсному выходу D -триггера 2 (3-5) основной группы, а второй вход к выходу второй дополнительной логической схемы совпадения 23 (25-27), первый вход которой подключен к прямому выходу собственного 13 -триггера 19 (2О-22), а второй вход - к прямому выходу кан-ала 1О (7-9) датчика 6 положения ротора, один из выходов, например инверсный, каждого) -триггера вторЫ группы подключен к соответствукяиему входу логического сумматс а 1, а первый вход логической схемы совпадения 12 (14, 16 и 18) подключен к инверсному выходу D -триггера 2О (21, 22 и 19) второй группы.
Устройство для определения направления вращения вентильного электродвигателя работает следующим образом.
Лля примера рассмотрим работу устройства (фиг. 1), определякжцего направление вращения вентильного электродвигателя с четырехканальным датчиком положения ротора, вырабатывающим сигналы длительностью iC, смещенные на угол It / 2.
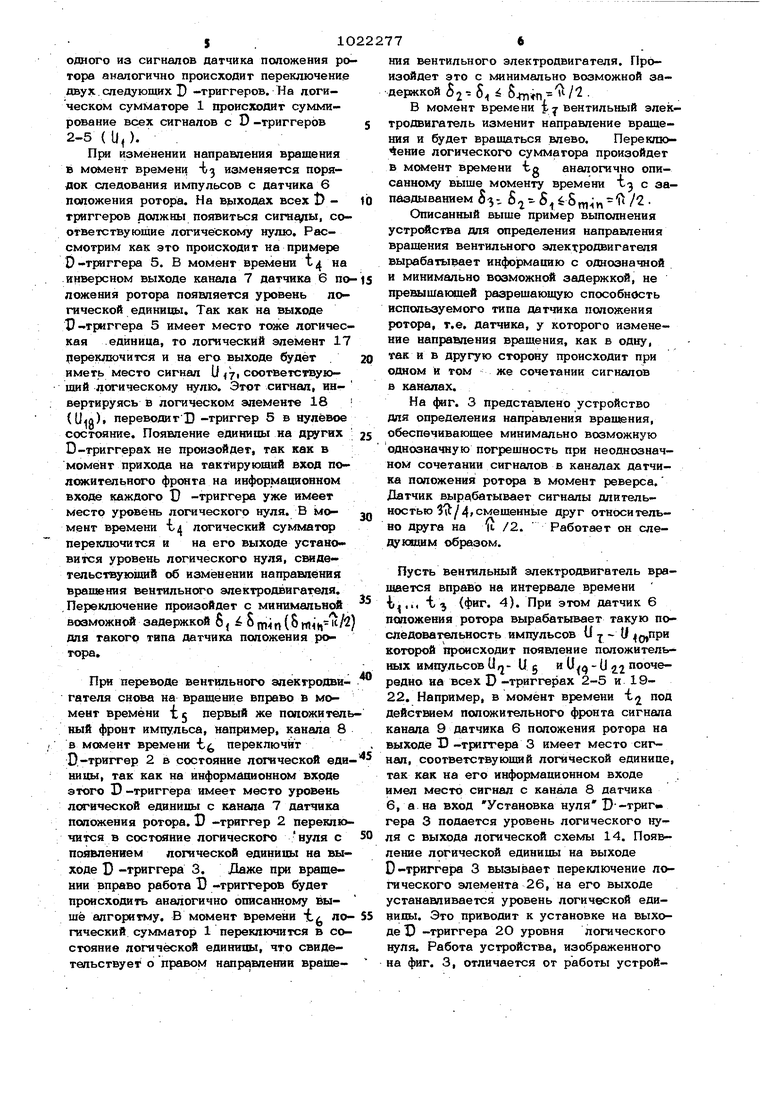
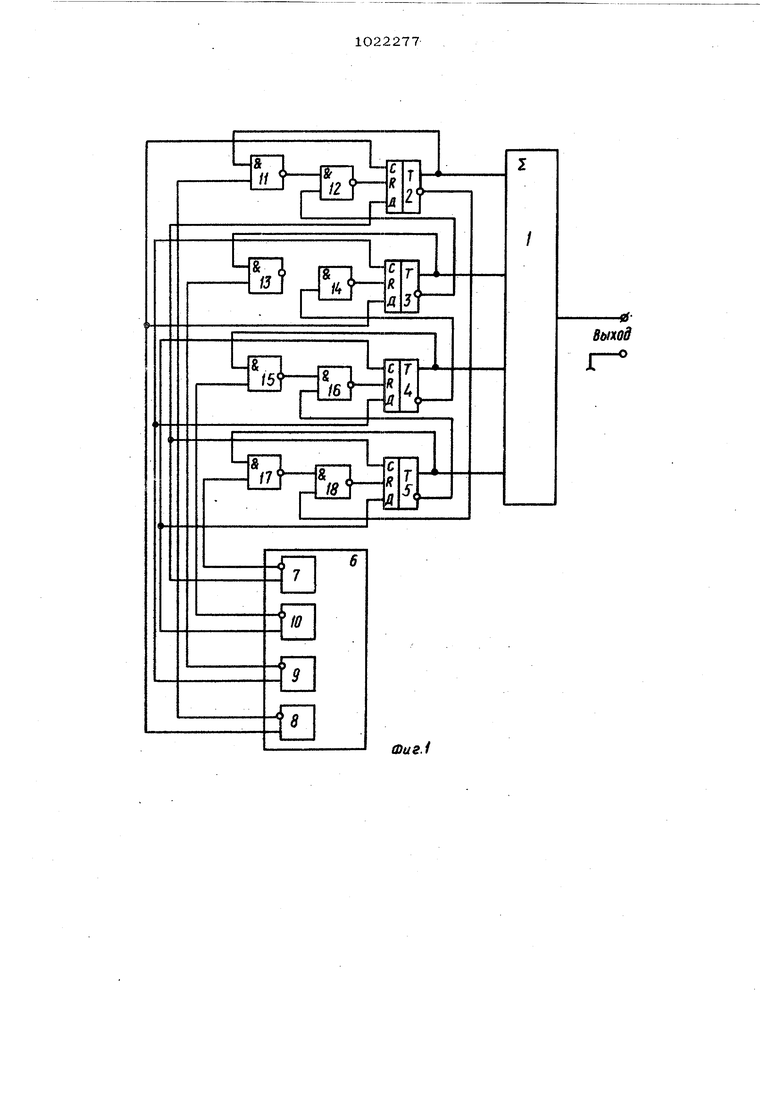
При направлении вращения вентильного электродвигателя, например, вправо, на интервале времени t ... i з (Фиг. 2) датчик 6 положения ротора вырабатывает такую последовательность импульсов {J-j-U jj,npH которой происходит появление положительных импульсовЦ- U поочередно на BcexD -триггерах 2-5. Так, например, в момент времени Ij ов действием положительного фронта сигнала lift канала 9 датчика 6 положения ротора на выходе D -триггера 3 устанавливается положительный потенциал, так как на его информационном входе имел место положительный потенш1ал с канала 8 датчика 6 положения ротора, а на вход Установка нуля -триггера 3 подается уровень логического нуля ((/« выхода логической схемы 14. Появление логическсЛ единицы на выходе ТЭ -триггера 3 вызывает переключение логического элемента 12 - на его выходе устанавливается уровень логической единицы (Uj,). Это приводит к установке на выходе D -триггера 2 уровня логического нуля. С приходдал очередного положительного фронта одного из сигналов датчика положения ро тора аналогично происходит переключение двух следующих D -триггеров. На логическом сумматоре 1 происходит суммирование всех сигналов с D -триггеров 2-5 {U). При изменении направления вращения в м(1ент времени Ь изменяется порядок следования импульсов с датчика 6 положения ротора. На выходах всех 1)триггеров должны появиться , соответствующие логическ му1у нулю. Рассмотрим как это происходит на примере 1) -триггера 5. В момент t на инверсном выходе канала 7 датчика 6 по ложения ротора появляется уровень логической единицы. Так как на выходе Р-триггера 5 имеет место тоже логическая единица, то логический элемент 17 переключи тся и на его выходе будет иметь место сигнал U t, соотъетсгвуюший логическому нулю. Этот сигнал, инвертируясь в логическом элементе 18 (Uia) перевода т D -триггер 5 в нулевое состояние. Появление единицы на других D-триггерах не произойдет, так как в момент прихода на тактирующий вход полспкительного фронта на информационном входе каждого D -триггера уже имеет место уровень логического нуля. В момент времени Ь логический сумматор переключится и на его выходе устано вится уровень логического нуля, свиде тельст ющий об изменении направления вращения вентильного электродвигателя. Переключение произойдет с минимальной возможной задержкой 6 S щ, {8 it/2 для такого типа датчика положения ротораПри переводе вентильного электродвигателя снова на вращение вправо в момент времени ij первый же положитель ный фронт импульса, , канала 8 в момент времени t. переключит D.-триггер 2 в состояние логической еди ницы, так как на информационном входе этого D -триггера имеет место уровень логической единицы с канала 7 датчика положения ротора. D -триггер 2 переклк чится в состояние логического нуля с появлением логической единицы на выходе D -триггера 3. Даже при вращении вправо работа D -триггеров будет происходить аналогично описанному выше алгоритму, В момент времени ii/ погический сумматор 1 переключится в состояние логической единицы, что свидетельствует о правом направлении враЩения вентильного электродвигателя. Произойдет это с минимально возможной зв держкой 52 - 6 S Tiirn- /2 В момент времени i у вентильный электродвигатель изменит направление вращения и будет вращаться влево. Переклю«ieHHe логического сумматора произойдет в момент времени fcg аналогично описанному выше моменту времени Ь-; 3 с запаздыванием 5з- . Описанный выще пример выполнения устрсЛства для определения направления вращения вентильного электродвигателя вырабатывает информацию с однозначной и минимально возможной задержкой, не превышакяией разрешающую способность используемого типа датчика положения ротора, т.е. датчика, у которого изменение нап1}авления вращения, как в одну, так и в другую сторону происходит при одном и том же сочетании сигналов в каналах. На фиг. 3 представлено устройство для определения направления вращения, обеспечивающее минимально возможную однозначную погрешность при неоднозначном сочетании сигналов в каналах датчика положения ротора в момент реверса. Датчик вырабатывает сигналы длительностью S у4, смещенные друг относительно друга на |с /2. Работает он следующим образом. Пусть вентильный электродвигатель вращается вправо на интервале времени {,,, t 3 (фиг. 4). При этом датчик 6 положения ротора вырабатывает такую последовательность импульсов U - и 4о,при которой происходит появление положительных импульсов U,j- Ug и ll|( - и редно на всех D -тригге рах 2-5 и 1922. Например, в момент времени i. под дейстшем положительного фронта сигнала канала 9 датчика 6 положения ротора на выходе D -триггера 3 имеет место сигнал, соответствующий логической единице, так как на его информационном входе имел Место сигнал с канала 8 датчика 6, а на вход Установка нуля Р-триг гера 3 подается уровень логического нуля с выхода логической схемы 14. Появление логической единицы на выходе D-триггера 3 вызывает переключение логического элемента 26, на его выходе устанавливается уровень логической единицы. Это приводит к установке на выходе D -триггера 2О уровня логического нуля. Работа устройства, изображенного на фиг. 3, отличается от работы устрой;сгва, изображенного на фиг. 1, тем, что переключение D -триггеров второй группы 19-22 происходит по положительному фронту соответствующего инвертированного сигнала датчика 6 положения роторю, или, что тоже самое, по отрицательному фронту соответствующего прямого сигнала датчика 6 положения ротора. На интервале времени i..,.,ib логический сумматор 1 суммирует сигаалы, соответствующие логическим едиаиоам с ыдходов всех D -триггеров, и папученн.ая ннформедия свидетельствует об определенном направлении вращения вентильного электродвигателя. В момент времени пртмом выходе канала 10 датчика положения ротора появляется уровень лсгической едини- цы. Так как на выходе 17 -триггера 19 также имеет место уровень логической единицы, то логический элемент 23 переключится в состояние, соответствующее логическому нулю. Этот сигнал инвертируется в логическо)м элементе 2-4, Под действием его D-триггера 19 перей дет в состояние, соответствукшее логи-. ческому нулю. ПояЁлесше сигнала логиче кая единица на других I) -триггерах не произойдет, так как в маиеят прихода положительного ттв ва тактирукяпий вход на информационном входе каждого из них имеет место сигнал, соответствукяпий логическому . В момент времени 1 логический сумматор переклк чнтся и нд его . выходе установится уровень логического нуля, свидетельству ющий об изменении направления t вращения. 10 78 После реверсиврования вентильного электродвигателя в момент времени tj, первое же появление положительного ронта в,данном случае сигнала канала 9 датчика 6 вызовет появление сигнала, соответствунядего логической единице, на выходе соответствующего О -триггера.. Это приведет к появлению в момент времени Т на выходе логического сумматонра 1 сигнала, соответствующего логячес;кой единице, соответствующего правому направлению вращения вентильного элек:тродвигателя. Переключение D -триггеров в моменты tg и дпосле реверсирования :вентильного электродкггателя соответст-венно в моменты времени t, и /(.в происходит описанным выше способом. При этом задержка & срабатывании устройства для {шределения направления вращения .минимально возможная и в каждом случае не превышает величины разрешающей способности датчика 6 положения ротора, т.е. S Sf S- &4 6mih /4 Использование изобрет 1ия позволит повысить точность определения направления вращенвя до величины разрешающей способности используемого в вентильном электроД1 гателе датчике положения роте за счет устранения -li неоднозначности выходной характеристики. Это даст возможность реализовать, на базе ве тиль,ных электроДН1гателей различные системы регулирдаания приводов робототехни.ки, позиционных приводов поы 1шенной точности.
Фиг.1
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения направления вращения вентильного электродвигателя | 1981 |
|
SU1022278A1 |
| Устройство для управления вентильным электродвигателем | 1983 |
|
SU1166255A1 |
| Вентильный электродвигатель | 1984 |
|
SU1259461A1 |
| Устройство для определения направления вращения вентильного электродвигателя | 1984 |
|
SU1252901A1 |
| Устройство для управления вентильным электродвигателем | 1984 |
|
SU1259462A1 |
| Вентильный электродвигатель | 1984 |
|
SU1272413A2 |
| Вентильный электродвигатель с токовым регулированием | 1989 |
|
SU1677807A2 |
| Вентильный электродвигатель | 1984 |
|
SU1325632A1 |
| Устройство для управления вентильным электродвигателем | 1985 |
|
SU1277342A2 |
| Устройство для определения направления вращения вентильного электродвигателя | 1986 |
|
SU1365329A1 |
1. УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ ВРАЩЕНИЯ ВЕНТИЛЬНСГО ЭЛЕКТРОДВИГАТЕЛЯ, содержащее многоеходдаой логический сумматор, и первую группу D -триггеров в количестве, равнпл числу Ш каналов датчика положения ротора вентильного электродвигателя, в каждом п- М В -триггере информаанонный и тактируемый -входы подключены к прямым выходам п -го и (П+1)-го каналов датчика псяожения ротора соответственно, один из выходов каждого Р -триггера подключен к соответствукяцему входу логического сумматора, выход которого является выходом устройства, о т л и ч а ю ш е е с я тем, что, с целью повышения точности за счет устранения неоднозначности выходной характеристики, 6 него дополнительно введены на каждый D-триггер две логические схемы совпадения, а каждый канал датчика положения ротора выполнен с инверсным выходом, к входу Установка нуля И -го D -триггера подключен выход первой логической схемы совпадения, первый вход которой связан с инверсным выходом другого D -триггера, а тугорой вход подключен к выходу второй логической схемы совпадения, первый вход которой подключен к прямому выходу собственного D -триггера, а второй вход - к инверсному выходу 
Фиг.З
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| БЕСКОНТАКТНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА ПОСТОЯННОГО ТОКА | 0 |
|
SU283373A1 |
| кд | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Разработка систем электропривода для органов управления подвижного объекта | |||
| Отчет МЭИ NT ф | |||
| Многокамерная газовая печь непрерывного действия | 1927 |
|
SU13966A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Дорожная спиртовая кухня | 1918 |
|
SU98A1 |
