Изобретение относится к электротехнике, в частности к электроприводу с вентильным электродвигателем, и может быть использовано в системах позиционного привода и приводах робототехники.
Целью изобретения является улучшение качества регулирования в режике позиционирования и повышение надежности останова.
На фиг. 1 приведена принципиальная схема устройства для управления вентильным электродвигателем; на фиг. 2 - принципиальная схема трехвходового формирователя управляюш,его сигнала на останов; на фиг. 3 - принципиальная схема запоминающего блока; на фиг. 4 - принципиальная схема блока сравнения; па фиг. 5 - временные диаграммь, поясняющие работу устройства.
Устройство для управления вентильным электродвигателем (фиг. I) содержит преобразователь 1 частоты, цепи управления ключей которого связаны с выходом т-канального датчика 2 положения ротора через управляемый блок 3 формирования сигналов правого и левого направления вращения, первый управляющий вход которого связан с выходом логической схемы 4 ИСКЛЮЧАЮЩЕЕ ИЛИ, задатчик 5 направления, триггер 6 команд «Пуск и «Стоп, датчик 7 направления вращения, включенный между выходом ш-канального датчика 2 положения ротора и первым входом трехвходового формирователя 8 управляюилего сигнала на останов, второй вход которого подключен к выходу логической схемы 4 ИСКЛЮЧАЮЩЕЕ ИЛИ, а третий вход - к выходу триггера 6 команд «Пуск и «Стоп, выход трехвходового формирователя 8 управляющего сигнала на останов связан с вторым управляющим входом управляемого блока 3 формирования сигналов правого и левого направления врапаения, запоминающий блок 9 т-информационных входа которого подключены к соответствующим выходам т-канальпого датчика 2 положения ротора и соединены с вторыми т-ипформационными входами блока 10 сравнения, а управляющий вход запоминающего блока 9 подключен к выходу трехвходового формирователя 8 управляющего сигнала на останов и соединен с первым входом формирователя 11 сигнала на торможение противовключением, второй вход которого подключен к выходу логической схемы 4, и ИСКЛЮЧАЮЩЕЕ ИЛИ, третий вход подключен к выходу датчика 7 направления врац;ения, а выход соединен с вторым входом управляемого блока 3 формирования сигналов правого и левого направления вращения, первый вход которого подключен к выходу блока И) сравнения, первые т-информационных входа которого подключены к т-выходам запоминающего
блока 9, а управляющий вход соединен с выходом трехвходового формирователя 8 управляющего сигнала на останов.
Формирователь 1 I сигнала на торможение противовключением содержит логическую схему 12 2-Й-НЕ, логическую схему 13 2-ИЛИ и логическую схему 14 2-И-НЕ. Выходы 15 и 16 логических схем 12 и 13 подключены к входам 17 и 18 логической схемы 14, выход 19 которого является выходом 20 формирователя 11 сигнала на торможение противовключением, первым входом 21 которого являются соединенные между собой первые входы 22 и 23 логических с.хем 12 и 13, вторым входом 24 - второй вход 25 логической схемы 12, а третьим входом 26 - второй вход 27 логической схемы 13.
Трехвходовой фо)мирователь 8 (фиг. 2) управляющего сигнала па останов содержит логическую схему 28 ИСКЛЮЧАЮЩЕЕ
0 ИЛИ, логическую схему 29 2-ИЛИ-НЕ и RSтриггер 30, выход логической схемы 28 подключен к первому входу 31 логической схемы 29, выход которой подключен к входу 32 Установка пуля /.5-триггера 30, выход 33 которого является выходом 34 указанного
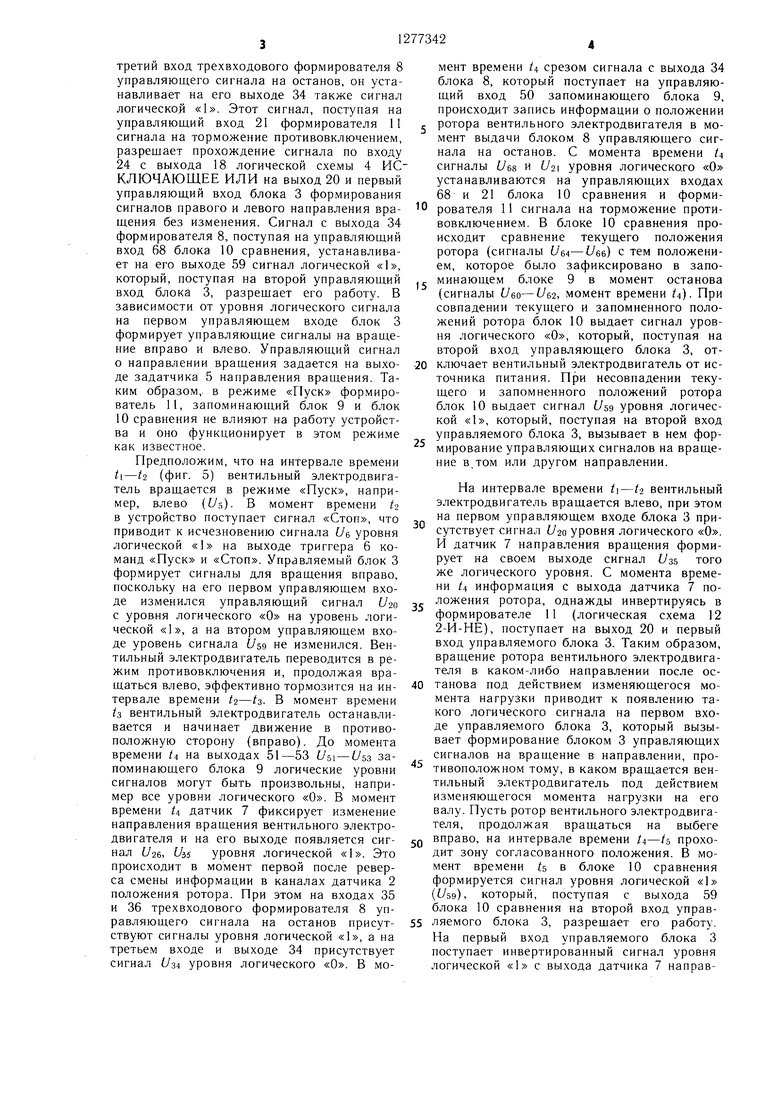
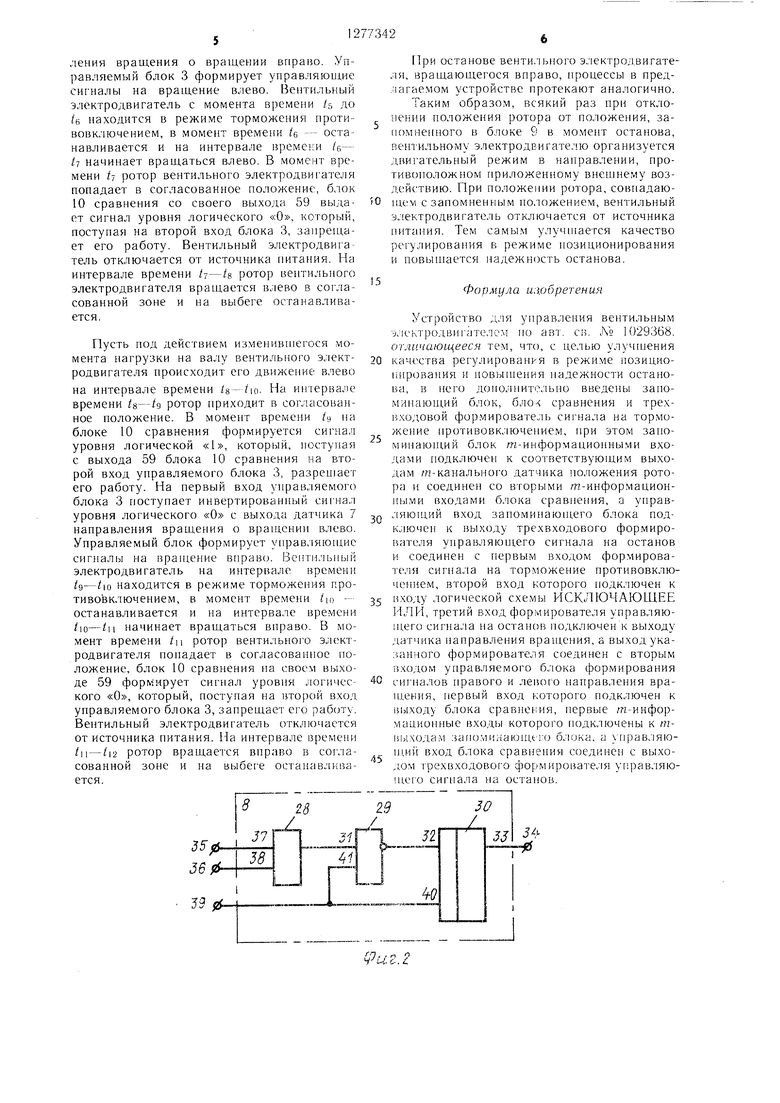
формирователя 8, первым 35 и вторым 36 входами которого являются соответственно первый 37 и второй 38 входы логической схемы 28 ИСКЛЮЧАЮЩЕЕ ИЛИ, а третьим 39 - вход 40 «Установка единицы / 5-триггера 30, объединенный с вторым входом 41 логической схемы 29 2-ИЛИ-НЕ, Запоминающий блок 42 (фиг. 3) содержит три D-триггера 43-45, информационные входы 46-48 которых образуют трехканальный информационный вход 49 указанного
r блока, тактирующие входы D-триггеров 43- 45 объединены и образуют управляющий вход 50 блока 42. Выходы 51-53 D-триггеров 43-45 образуют трехкапальный выход 54 блока 42 памяти.
Блок 10 сравнения (фиг. 4) содержит
0 три логические схемы 55-57 ИСКЛЮЧАЮЩЕЕ ИЛИ и логическую схему 58 4-И Л И. Выходы логических схем 55-57 подключены к первым трем входам логической схемы 58, выход которой является выходом 59 блока 10 сравнения. Первые входы 60-62 ло гических схем 55-57 являются первым трехкапальпым информационны.м входом 63 блока 10 сравнения. Вторые входы 64-66 логических схем 55-57 являются вторым трехкапальным информационным входом 67 блока
Q 10 сравнения. Четвертый вход логической схемы 57 4-ИЛИ является управляющим входом 68 блока 10 сравнения.
Устройство для управления вентильным электродвигателем работает следующим образом.
При наличии команды «Пуск на выходе триггера 6 команд «Пуск и «Стоп присутствует сигнал логической «1. Поступая на
третий вход трехвходового формирователя 8 управляющего сигнала на останов, он устанавливает на его выходе 34 также сигнал логической «1. Этот сигнал, поступая на управляюплий вход 21 формирователя 11 сигнала на торможение противовключением, разрешает прохождение сигнала по входу 24 с выхода 18 логической схемы 4 ИСКЛЮЧАЮЩЕЕ ИЛИ на выход 20 и первый управляющий вход блока 3 формирования сигналов правого и левого направления вращения без изменения. Сигнал с выхода 34 формирователя 8, поступая на управляющий вход 68 блока 10 сравнения, устанавливает на его выходе 59 сигнал логической «1, который, поступая на второй управляющий вход блока 3, разрешает его работу. В зависимости от уровня логического сигнала на первом управляющем входе блок 3 формирует управляющие сигналы на вращение вправо и влево. Управляющий сигнал о направлении вращения задается на выходе задатчика 5 направления вращения. Таким образом, в режиме «Пуск формирователь 11, запоминающий блок 9 и блок 10 сравнения не влияют на работу устройства и оно функционирует в этом режиме как известное.
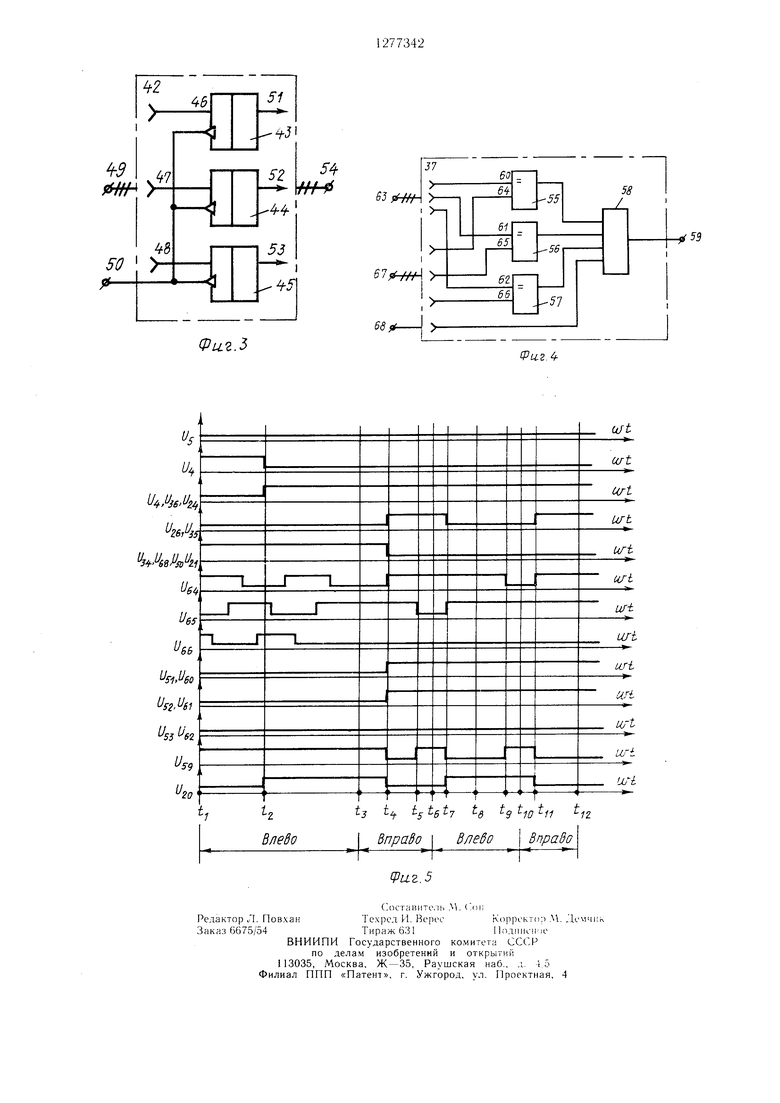
Предположим, что на интервале времени (фиг. 5) вентильный электродвигатель вращается в режиме «Пуск, например, влево (t/s). В момент времени /г в устройство поступает сигнал «Стоп, что приводит к исчезновению сигнала Uf, уровня логической «1 на выходе триггера 6 команд «Пуск и «Стоп. Управляемый блок 3 формирует сигналы для вращения вправо, поскольку на его первом управляющем входе изменился управляющий сигнал f/so с уровня логического «О на уровень логической «1, а на втором управляющем входе уровень сигнала f/sg не изменился. Вентильный электродвигатель переводится в режим противовключения и, продолжая вращаться влево, эффективно тормозится на интервале времени tz-/з. В момент времени /3 вентильный электродвигатель останавливается и начинает движение в противоположную сторону (вправо). До момента времени /4 на выходах 51-53 t/si - /53 запоминающего блока 9 логические уровни сигналов могут быть произвольны, например все уровни логического «О. В момент времени t датчик 7 фиксирует изменение направления вращения вентильного электродвигателя и на его выходе появляется сигнал t/26, Ui,s уровня логической «1. Это происходит в момент первой после реверса смены информации в каналах датчика 2 положения ротора. При этом на входах 35 и 36 трехвходового формирователя 8 управляющего сигнала на останов присутствуют сигналы уровня логической «1, а на третьем входе и выходе 34 присутствует сигнал L34 уровня логического «О. В момент времени /4 срезом сигнала с выхода 34 блока 8, который поступает на управляющий вход 50 запоминающего блока 9, происходит запись информации о положении ротора вентильного электродвигателя в момент выдачи блоком 8 управляющего сигнала на останов. С момента времени i сигналы (768 и 21 уровня логического «О устанавливаются на управляющих входах 68 и 21 блока 10 сравнения и формирователя 11 сигнала на торможение противовключением. В блоке 10 сравнения происходит сравнение текущего положения ротора (сигналы UM-t/ee) с тем положением, которое было зафиксировано в запоминающем блоке 9 в момент останова (сигналы U60-U&2, момент времени 4)- При совпадении текущего и запомненного положений ротора блок 10 выдает сигнал уровня логического «О, который, поступая на второй вход управляющего блока 3, отключает вентильный электродвигатель от источника питания. При несовпадении текущего и запомненного положений ротора блок 10 выдает сигнал (/БЭ уровня логической «1, который, поступая на второй вход управляемого блока 3, вызывает в нем формирование управляющих сигналов на вращение в,том или другом направлении.
На интервале времени вентильный электродвигатель вращается влево, при этом на первом управляющем входе блока 3 при0сутствует сигнал уровня логического «О. И датчик 7 направления вращения формирует на своем выходе сигнал (Уз5 того же логического уровня. С момента времени /4 информация с выхода датчика 7 положения ротора, однажды инвертируясь в формирователе 11 (логическая схема 12 2-И-НЕ), поступает на выход 20 и первый вход управляемого блока 3. Таким образом, вращение ротора вентильного электродвигателя в каком-либо направлении после ос0 танова под действием изменяющегося момента нагрузки приводит к появлению такого логического сигнала на первом входе управляемого блока 3, который вызывает формирование блоком 3 управляющих сигналов на вращение в направлении, противоположном тому, в каком вращается вентильный электродвигатель под действием изменяющегося момента нагрузки на его валу. Пусть ротор вентильного электродвигатапя, продолжая вращаться на выбеге
Q вправо, на интервале времени /4-/з проходит зону согласованного положения. В момент времени (s в блоке 10 сравнения формируется сигнал уровня логической «1 ((/ээ), который, поступая с выхода 59 блока 10 сравнения на второй вход управ5 ляемого блока 3, разрешает его работу. На первый вход управляемого блока 3 поступает инвертированный сигнал уровня логической «1 с выхода датчика 7 направления вращения о вращении вправо. Управляемый блок 3 формирует управляющ,ие сигналы на вращение влево. Вентильный электродвигатель с момента времени /5 до /6 находится в режиме торможения противовключением, в момент времени ta --- останавливается и на интервале времени /е- /7 начинает вращаться влево. В момент времени tj ротор вентильного электродвигателя попадает в согласованное положение, блок 10 сравнения со своего выхода 59 выдает сигнал уровня логического «О, который, поступая на второй вход блока 3, запрещает его работу. Вентильный электродвигатель отключается от источника питания. На интервале времени /7-/в ротор вентильного электродвигателя вранлается влево в согласованной зоне и на выбеге останавливается.
Пусть под действием изменившегося момента нагрузки на валу вентильного электродвигателя нроисходит его движение влево на интервале времени На интервале времени /8-/э ротор приходит в согласованное положение. В момент времени /9 блоке 10 сравнения формируется сигнал уровня логической «1, который, поступая с выхода 59 блока 10 сравнения на второй вход унравляемого блока 3, разреи ает его работу. На первый вход унравляемого блока 3 поступает инвертированный сигнал уровня логического «О с выхода датчика 7 нанравления вращения о вращении влево. Управляемый блок формирует управ.1яюп1ие сигналы на вранц ние вправо. Вентильный электродвигатель на интервале времени находится в режиме торможения противовключением, в момент времени /ю останавливается и на интервале времени t o-/11 начинает вращаться вправо. В момент времени t ротор вентильного электродвигателя попадает в согласованное положение, блок 10 сравнения на своем выходе 59 формирует сигнал уровня логического «О, который, поступая на второй вход управляемого блока 3, запрещает его работу. Вентильный электродвигатель отключается от источника питания. На интервале времени ротор вращается вправо в согласованной зоне и на выбеге останавливается.
Нри останове вентил1 ного э.лектродвигателя, вращающегося вправо, процессы в предлагаемом устройстве протекают аналогично.
Таким образом, всякий раз прп отклояении положения ротора от положения, запомненного в блоке 9 в момент останова, вентильному электродвигателю организуется двигательный режим в направлении, противоположном приложенному воздействию. При положении ротора, совнадающе 1 с запомненным положением, вентильный э.(ектродвигатель отключается от источника питания. Тем самы.м улучп1ается качество регулирования в режиме нозиционирования и повьинается надежность останова.
Формула и.юбрвтения
Устройство для управления вентильным алсктродвигателс.м по авт. св. До 1029368. отличающееся тем, что, с целью улучшения качества регулирования в режиме позицио11нрования и новьинепия надежности останова, в него донолнитольно введены заномипаюн|ий блок, бло- сравнения и трехг,хо;10вой формирователь сигнала на торможение 11ротивовк;1ючением, при этом запоминаю дий блок т-информационными входами подключен к соответствующим выходам 7-канального датчика положения ротора и соединен со вторыми т-информацион1п 1ми входами блока сравнения, а управ.- яющий вход запоминаюп1.его блока подключен к выходу трехвходового формирователя унравляюп1.его сигнала на останов и соединен с первым входом формирователя сигпала на торможение противовключепием, второй вход которого подключен к входу логической схемы ИСКЛЮЧАЮЩЕЕ 1Л1-1, третий вход формирователя управляющего сигнала на останов подключен к выходу датчика направления вра1цения, а выход указанного формирователя соединен с вторым входом управ.пяемого блока формирования сигналов правого и левог-о направления вра1цения, первый вход которого подключен к 1 ьгходу блока сравнения, первые т-информациопные входы которого подключены к ш1я 1ходам заг10.1инаю1це1о блока, а чправляюП1ий вход блока сравнения соединен с выходом трехвходового формир01 ате;1я управ:1яющего сигпала на остапов.
э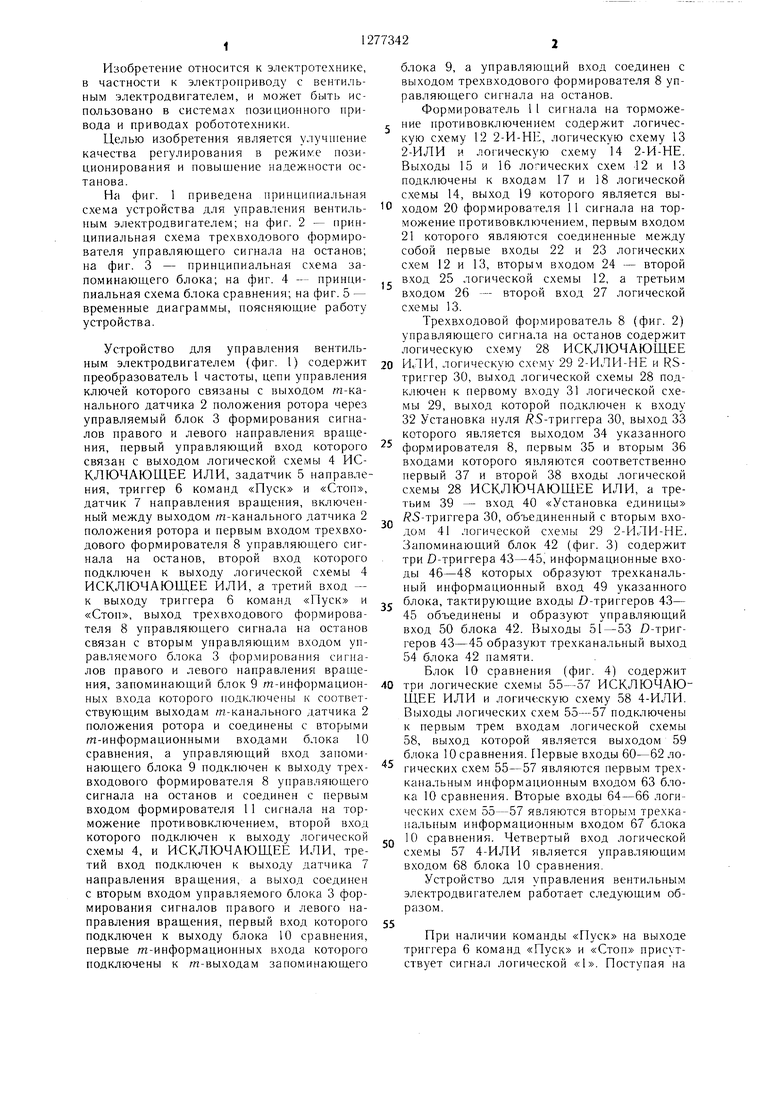
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления вентильным электродвигателем | 1983 |
|
SU1166255A1 |
| Устройство для управления вентильным электродвигателем | 1985 |
|
SU1302413A2 |
| Устройство для управления вентильным электродвигателем | 1982 |
|
SU1095321A1 |
| Устройство для управления вентильным электродвигателем | 1981 |
|
SU1029369A1 |
| Вентильный электропривод | 1985 |
|
SU1317630A1 |
| Устройство для управления вентильным электродвигателем | 1984 |
|
SU1259462A1 |
| Многодвигательный электропривод | 1978 |
|
SU974541A2 |
| Реверсивный вентильный электродвигатель с регулируемым торможением | 1985 |
|
SU1283928A1 |
| Устройство для управления вентильным электродвигателем | 1983 |
|
SU1164849A1 |
| Многодвигательный электропривод | 1978 |
|
SU942232A1 |
Изобретение относится к электротехнике и является усовершенствованием изобретения по авт. св. № 1029368. Целью изобретения является улучшение качества регулирования в режиме позиционирования и повышение точности останова. Указанная цель достигается тем, что дополнительно введены запоминаюший блок 9, блок 10 сравнения и трехвходовый формирователь 11 сигнала на торможение противовключением, тинформационные входы блока 9 соединены с выходами датчика 2 положения ротора синхронного двигателя и вторыми т-инерционными входами блока 10. Управляющий вход блока 9 связан с выходом формирователя 8 сигнала на останов, первым входом формирователя 11 и управляюш.им входом блока 10. Первые информационные твходы блока 10 соединены с т-выходами блока 9. Второй вход формирователя 11 подключен к входу логической схемы 4 ИСКЛЮЧАЮЩЕЕ ИЛИ, а третий вход - к выходу датчика 7 направления вращения. Выход формирователя 11 соединен со вторым входом блока 3 формирования сигналов правого и левого направления вращения, первый вход к-рого подключен к выходу блока 10. При отклонении положения ротора от положения, запомненного в блоке 9 iO в момент останова, в вентильном электродвигателе организуется двигательный режим (Л в направлении, противоположном приложенному внешнему воздействию. При положении ротора, совпадающим с запомненным положением, вентильный электродвигатель отключается от источника питания. 5 ил. ьо 00 4: ts2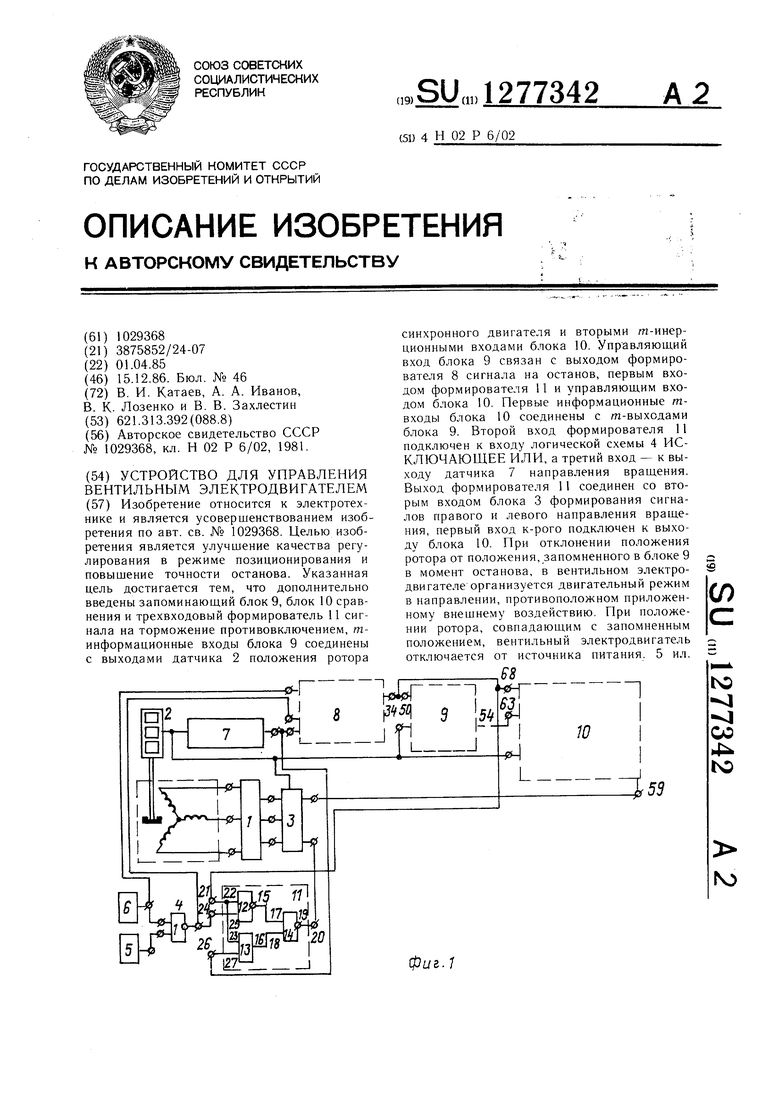
у иг..
.2
| Устройство для управления вентильным электродвигателем | 1981 |
|
SU1029368A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
