V
Изобретение относится к электротехнике, в частности к электроприводам, и может быть использовано для получения информации о направлении вращения вентильного электродвигателя, например, в устройствах экстренного останова и т.д., а также для защиты электродвигателей от неправильного направления вращения. I
Целью изобретения является повьше ние точности путем устранения неоднозначности выходной характеристики.
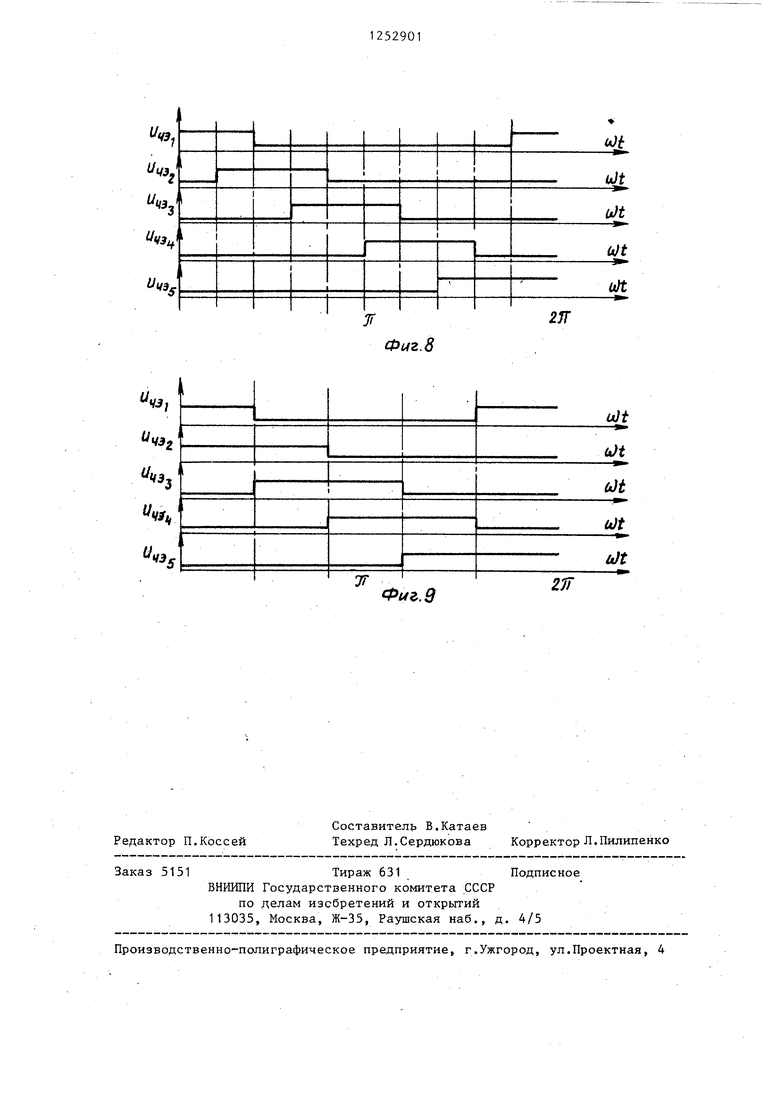
На фиг. 1 изображена блок-схема устройства для определения направления вращения вентильного электродвигателя; на фиг„ 2 - функциональная схема устройства для определения направления вращения вентильного электродвигателя с трехканальным датчиком положения индуктора; на фиг. 3 - функциональная схема устройства для определения направления вращения вентильного электродвигателя с канальным датчиком положения индуктора; на фиг. 4 - функциональный преобразователь при трехканальном датчике положения индуктора; на фиг. 5 - элемент памяти; на фиг. 6 - диаграммы напряжений в узлах функциональной схемы на фиг, 2; на фиг. 7 диаграммы напряжений в узлах функциональной схемы на фиг. 3; на фиг- 8- и 9 - диаграммы выходных сигналов пятиканальных датчиков положения индуктора, формирующих сигналы с коэффициентами заполнения соответственно 0,3 и 0,4.
Устройство для определения направления вращения вентильного электродвигателя (фиг. 1) с числом пар полюсов р и т-канальным датчиком 1 положения индуктора, обеспечивающим п тактов коммутации на угле ZlT/p, содержит логический сумматор 2, группу из I двухвходовых элементов памяти, выходы которых подключены к входам логического сумматора 2, функциональный преобразователь 3 с 1,выходными каналами, где f 2 3, выполнен - ный с возможностью формирования в каждом выходном канале сигналов длительностью , на периоде повторя емости 211Б/рп, с фазовым сдвигом 2 п /рп. Функциональный преобразова- тель 3 подключен входами к выходу т-канального датчика 1 положения индуктора, первьш 4 и второй 5 входы i-ro элемента памяти 6 подключены к
529012
i-му 7 и (i+10-му 8 выходам функционального преобразователя 3 соответственно, образуя по указанным подключениям кольцевую схему.
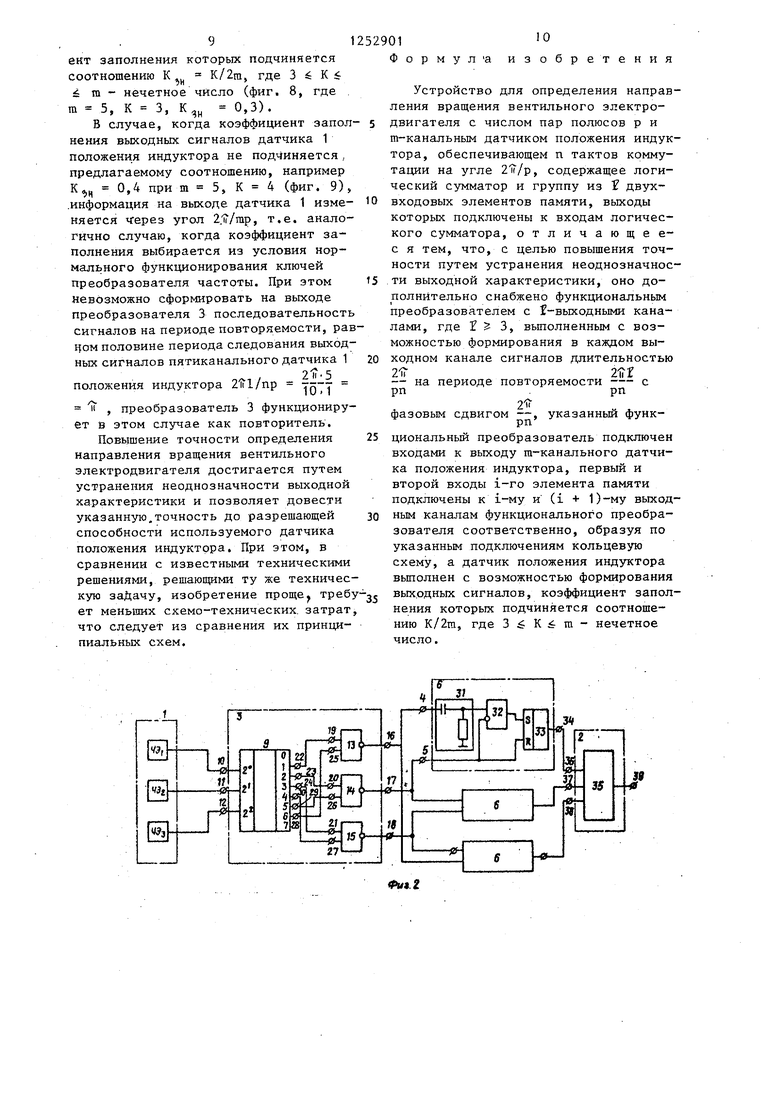
5 На фиг. 2 показано устройство для определения направления вращения вентильного электродвигателя с числом пар полюсов р 1 и трехканальным датчиком положения индуктора, форми10 рующим сигналы, с коэффициентном заполнения 0,5 (К/2т З/2 З 0,5), где 3 : К m - нечетное число,
В данном конкретном случае функ- хщональньй преобразователь 3 выпол-т
5 нен с тремя выходньми каналами (I
3), формирует в каждом выходном
II
канале сигналы длительностью :г х
..2 ir 21 .
on X V- ) на периоде повторяе- рп I D
/2 м2 2 |Г-Зч
мости II ( ----), с фазовьм сдвирп 1 6
1 ,2 21 , гом г (- ) преобразователь 3
25 состоит из дешифратора 9 двоичного трехразрядного кода в позиционный восьмиразрядный код, три входа -10- 12 которого служат входами функционального преобразователя 3 и трех
30 двухвходовых логических схем 13-15 ШШ-НЕ, выходы 16-18 которых, соответственно являются выходами преобразователя, первые входы 19-21 логических схем 13-15.ИЛИ-НЕ подкл;счены
35 соответственно к выходам 22-24 дешифратора 9, а вторые входы 25-27 - соответственно к выходам 28-30 дешифратора 9, на которых формируются сигналы, следующие по направлению враще40 ния за сигналами с выходов 22-24 дешифратора 9 со сдвигом относительно последних на угол It ,
Элемент 6 памяти содержит дифференцирующую цепь 31, вход которой является первым (информационньп) входом 4 элемента 6 памяти, логическую схему 32 И с прямьм и инвертирующим входами, выход которой соединен с входом Установка единицы
50 RS-триггера 33, выход которого явля- . ется выходом 34. элемента памяти 6, а вход Установка нуля, объединен- .ньй с инвертирующим входом логической схемы 32 И, служит вторым (разре55 тающим) входом 5 элемента 6 памяти. Прямой вход логической схемы 32 И соединен с выходом дифференцирующей цепи 31.
Логический сумматор 2 выполнен на основе трехвходовой логической схемы 35 ИЛИ, входы 36-38 и выход 39 которой служат, соответственно, входами и выходом логического сумматора 2.
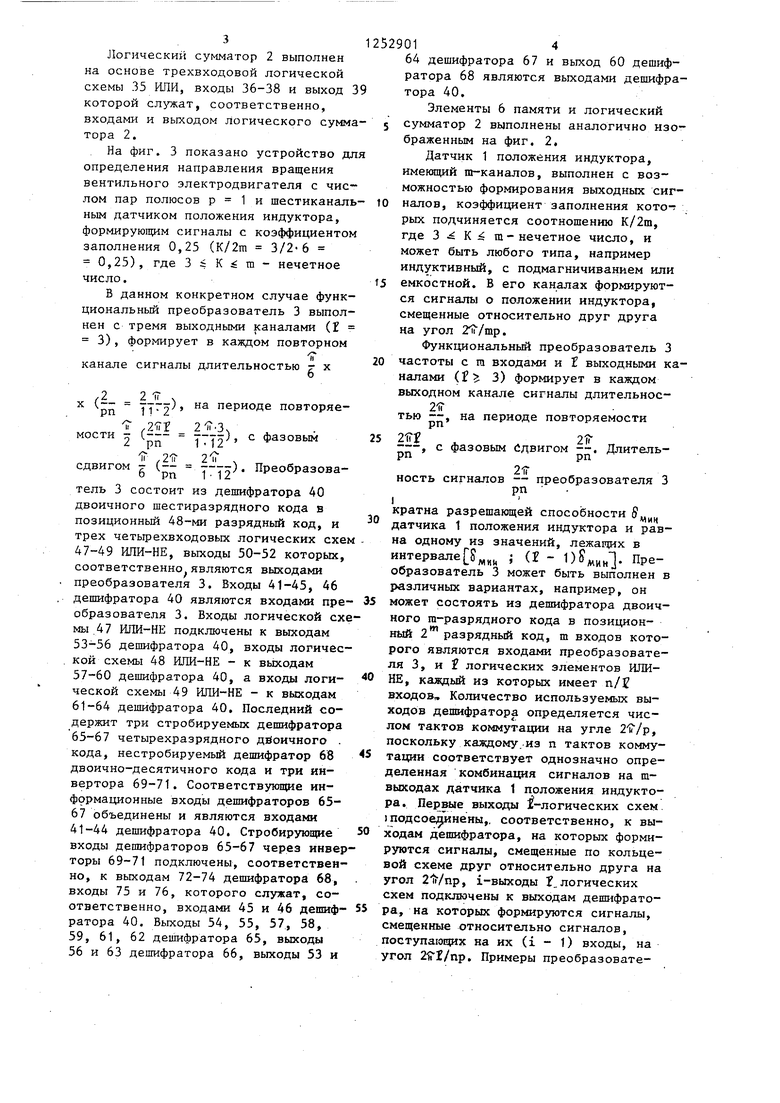
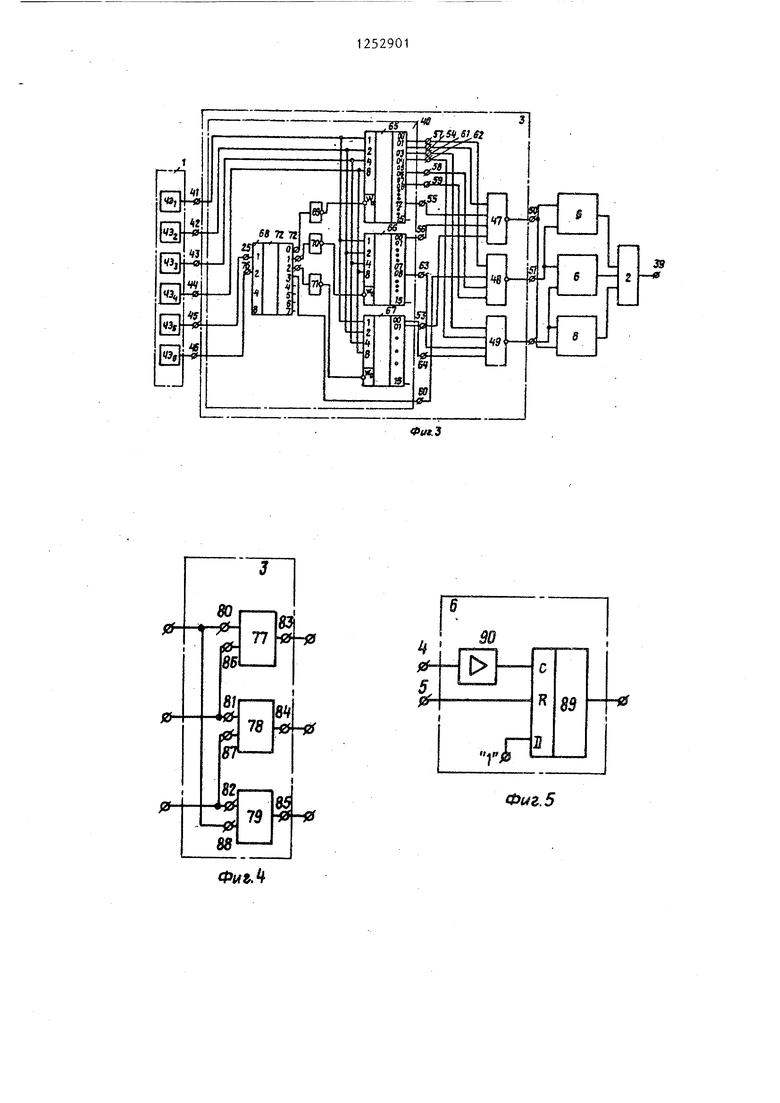
На фиг. 3 показано устройство для определения направления вращения вентильного электродвигателя с числом пар полюсов р 1 и шестиканаль- to налов, коэффициент заполнения кото-
ным датчиком положения индуктора, формирующим сигналы с коэффициентом заполнения 0,25 (К/2т 3/2-6 0,25), где 3 i К m - нечетное число.
В данном конкретном случае функциональный преобразователь 3 выполнен с тремя выходными каналами (I 3), формирует в каждом повторном
канале сигналы длительностью г х
о
/2 2 -и . X (- на периоде повторяеРП 71/
рп
МОСТИ
,.21ГГ 25.3.
п
. п 2
сдвигом 7 (- ) Преобразова- D рп I 12
тель 3 состоит из дешифратора 40 двоичного шестиразрядного кода в позиционный 48-ми разрядный код, и трек четырехвходовьи логических схем 47-49 Ш1И-НЕ, выходы 50-52 которых.
рых подчиняется соотношению К/2т, где 3 К m - нечетное число, и может быть любого типа, например индуктивный, с подмагничиванием или
Т5 емкостной. В его каналах формируются сигналы о положении индуктора, смещенные относительно друг друга на угол .
Функциональный преобразователь 3
20 частоты с m входами и выходными ка налами (Г 5 3) формирует в каждом выходном канале сигналы длительнос21Гтью -, на периоде повторяемости
25 2irf 2l
, с фазовым Сдвигом -, Длительрпрп
21Г ность сигналов - преобразователя 3
рп кратна разрешающей способности §..„,,
ЭпМИЧ
датчика 1 положения индуктора и равна одному из значений, лежащих в интервале 5„, j (2 - Преобразователь 3 может быть выполнен в различных вариантах, например, он дешифратора 40 являются входами пре- 35 может состоять из дешифратора двоич- образователя 3. Входы логической схемы 47 ИЛИ-НЕ подключены к выходам
соответственно являются выходами преобразователя 3. Входы 41-45, 46
ного т-разрядного кода в позиционный 2 разрядньй код, m входов которого являются входами преобразователя 3, и f логических элементов ИЛИ53-56 дешифратора 40, входы логической схемы 48 ИЛИ-НЕ - к выходам 57-60 дешифратора 40, а входы логической схемы 49 ИЛИ-НЕ - к выходам 61-64 дешифратора 40, Последний содержит три стробируемых дешифратора 65-67 четырехразрядного дйоичного . кода, нестробируемьй дешифратор 68 двоично-десятичного кода и три инвертора 69-71. Соответствующие информационные входы дешифраторов 65- 67 объединены и являются входами 41-44 дешифратора 40. Стробирующие входы дешифраторов 65-67 через инверторы 69-71 подключены, соответственно, к выходам 72-74 дешифратора 68, входы 75 и 76, которого служат, соответственно, входами 45 и 46 дешиф- 55ра, на которых формируются сигналы,
ратора 40. Выходы 54, 55, 57, 58,смещенные относительно сигналов,
59, 61, 62 дешифратора 65, выходыпоступающих на их (i - 1) входы, на
56 и 63 дешифратора 66, выходы 53 иугол . Примеры преобразовате2529014
64 дешифратора 67 я выход 60 дешифратора 68 являются выходами дешифратора 40.
Элементы 6 памяти и логический 5 сумматор 2 выполнены аналогично изображенным на фиг. 2,
Датчик 1 положения индуктора, имеющий т-каналов, выполнен с возможностью формирования выходных сигрых подчиняется соотношению К/2т, где 3 К m - нечетное число, и может быть любого типа, например индуктивный, с подмагничиванием или
емкостной. В его каналах формируются сигналы о положении индуктора, смещенные относительно друг друга на угол .
Функциональный преобразователь 3
частоты с m входами и выходными каналами (Г 5 3) формирует в каждом выходном канале сигналы длительнос21Гтью -, на периоде повторяемости
2irf 2l
, с фазовым Сдвигом -, Длительрпрп
21Г ность сигналов - преобразователя 3
рп кратна разрешающей способности §..„,,
МИЧ
датчика 1 положения индуктора и равна одному из значений, лежащих в интервале 5„, j (2 - Преобразователь 3 может быть выполнен в различных вариантах, например, он может состоять из дешифратора двоич-
ного т-разрядного кода в позиционный 2 разрядньй код, m входов которого являются входами преобразователя 3, и f логических элементов ИЛИНЕ, каждый из которых имеет п/2
входов,. Количество используемых выходов дешифратора определяется числом тактов коммутации на угле , поскольку каждому.из п тактов коммутации соответствует однозначно определенная комбинахщя сигналов на га- выходах датчика 1 положения индуктора. Первые выходы А-логических схем J подсоединены,, соответственно, к выходам дешифратора, на которых формируются сигналы, смещенные по кольцевой схеме друг относительно друга на угол 2li /np, i-выходы f. логических схем подключены к выходам дешифрато
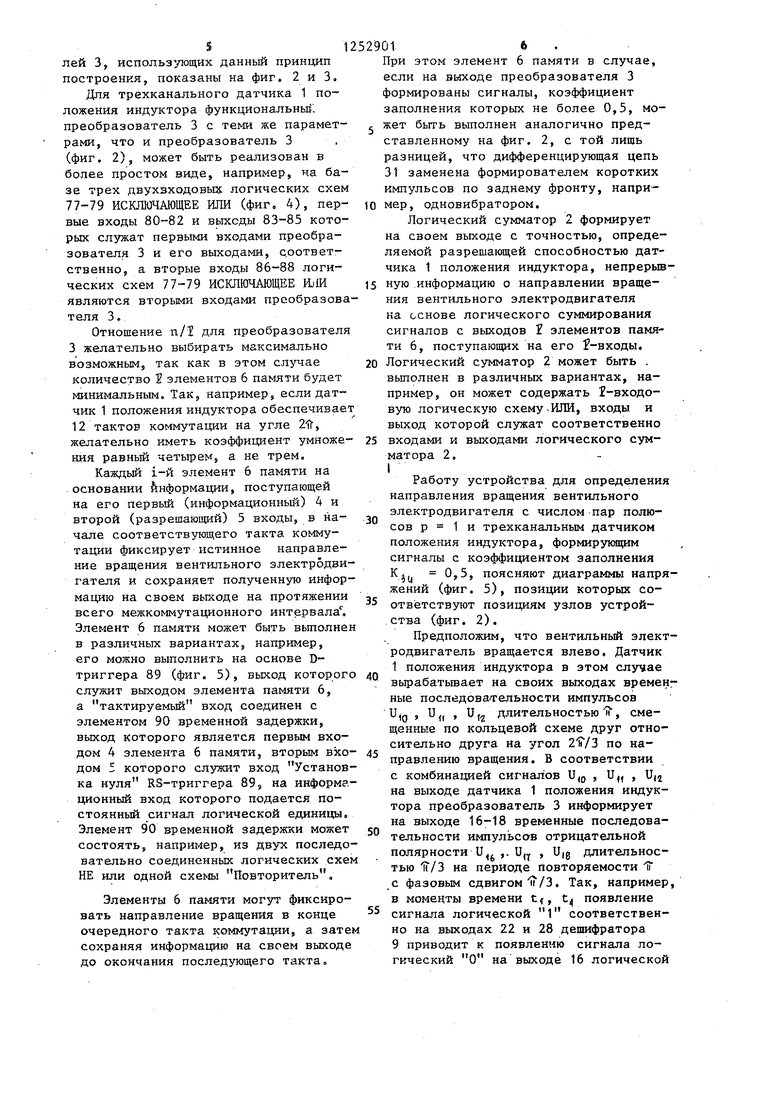
лей 3, использующих данный принцип построения, показаны на фиг. 2 и 3. Для трехканального датчика 1 положения индуктора функциональны . преобразователь 3 с теми же параметрами, что и преобразователь 3 . (фиг, 2), может быть реализован в более простом виде, например, на базе трех двухзходовмх логических схем 77-79 ИСКЛЮЧАЮЩЕЕ ИЛИ (фиг, 4), первые входы 80-82 и вьксды 83-85 которых служат первыми входами преобразователя 3 и его выходами, с.оответ- ственно, а вторые входы 86-88 логических схем 77-79 ИСКЛЮЧАЮЩЕЕ Mjffl являются вторыми входами преобразователя 3,
Отношение п/1 для преобразователя 3 желательно выбирать максимально возможным, так как в этом случае количество Е элементов 6 памяти будет минимальным. Так, например, если дат™ чик 1 положения индуктора обеспечивает 12 тактов коммутации на угле 2 ГГ, желательно иметь коэффигсиент умножения равный четырем, а не трем.
Каждьй i-й элемент 6 памяти на основании информации, поступающей на его первый (информационный) 4 и второй (разрешающий) 5 входы, в начале соответствующего такта коммутации фиксирует истинное направление вращения вентильного электродвигателя и сохраняет полученную информацию на своем выходе на протяжении всего межкоммутационного интервала Элемент 6 памяти может быть вьтолнен в различных вариантах, например, его можно выполнить на основе D- триггера 89 (фиг. 5), вькод которого служит выходом элемента памяти 6, а тактируемый вход соединен с элементом 90 временной задержки, выход которого является первым входом 4 элемента 6 памяти, вторым вхо- дом 5 которого служит вход Установка нуля RS-триггера 89, на информа
ционный вход которого подается постоянный сигнал логической единицы. Элемент 90 временной задержки может состоять, например, из двух последовательно соединенных логических схем НЕ или одной схемы Повторитель,
Элементы 6 памяти могут фиксировать направление вращения в конце очередного такта коммутации, а затем сохраняя информацию на своем выходе до окончания последующего такта
При этом элемент 6 памяти в случае, если на выходе преобразователя 3 формированы сигналы, коэффициент заполнения которых не более 0,5, может быть выполнен аналогично представленному на фиг. 2, с той лишь разницей, что дифференцирующая цепь 31 заменена формирователем коротких импульсов по заднему фронту, например, одновибратором.
Логический сумматор 2 формирует на своем выходе с точностью, определяемой разрешающей способностью датчика 1 положения индуктора, непрерьтную информацию о направлении вращения вентильного электродвигателя на основе логического суммирования сигналов с выходов 1 элементов памяти 6, поступающих на его f-входы.
Логический сумматор 2 может быть . выполнен в различных вариантах, например, он может содержать 1-входо- вую логическую схему-ИЛИ, входы и выход которой служат соответственно входами и выходами логического сумматора 2, I
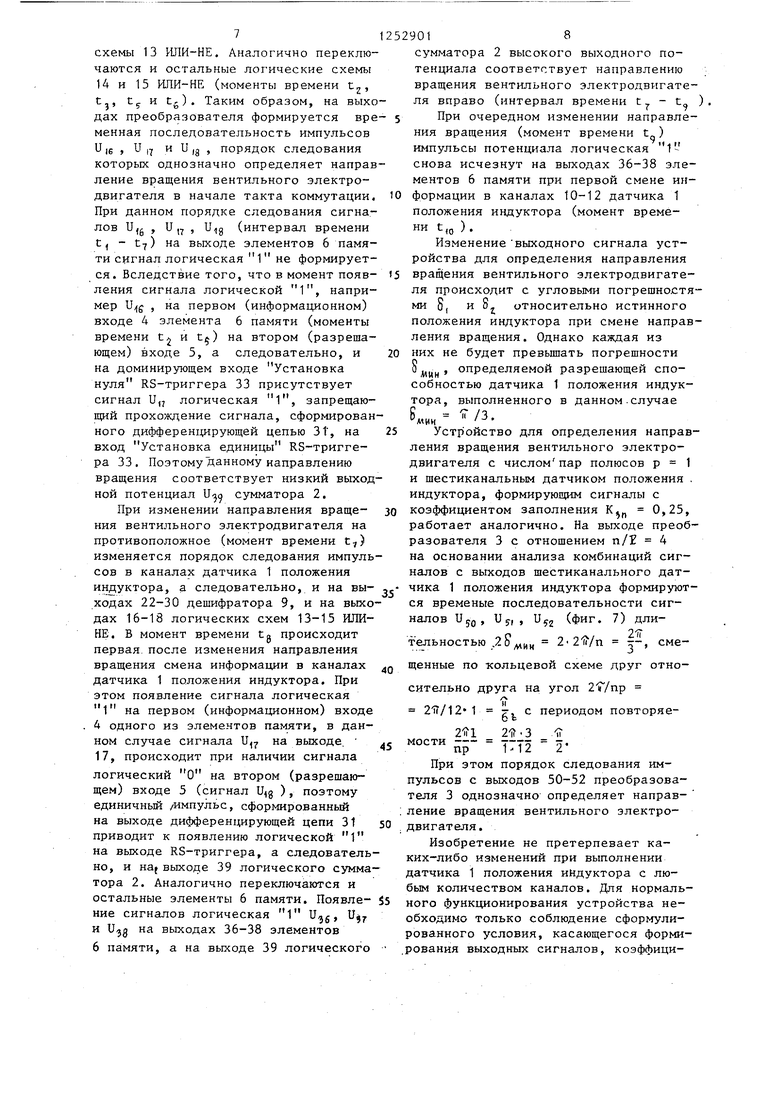
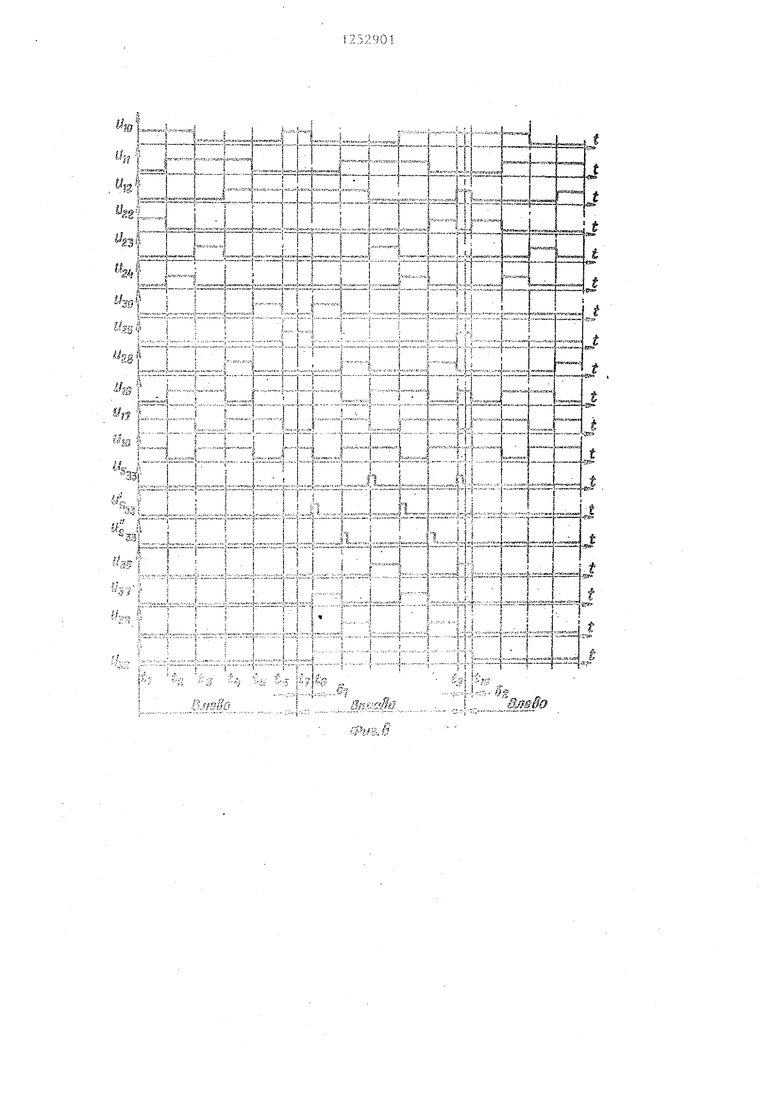
Работу устройства для определения направления вращения вентильного электродвигателя с числом пар полюсов р 1 и трехканальным датчиком положения индуктора, формир пощим сигналы с коэффициентом заполнения
К
(
0,5, поясняют диаграммы напря
жений (фиг. 5), позиции которых соответствуют позициям узлов устройства (фиг. 2).
Предположим, что вентильный электродвигатель вращается влево. Датчик 1 положения индуктора в этом случае вырабатьгеает на своих выходах времен ные последовательности импульсов U,g , Uf, , и ,2 длительностью Я, смещенные по кольцевой схеме друг относительно друга на угол 2)Г/3 по направлению вращения. В соответствии с комбинацией сигналов U,(, , UM г на выходе датчика 1 положения индуктора преобразователь 3 информирует на выходе 16-18 временные последовательности импульсов отрицательной полярности и, ,. и, , U|g длительностью ЧГ/З на периоде повторяемости Т с фазовым сдвигом н /З. Так, например, в момецты времени t, t появление сигнала логической 1 соответственно на выходах 22 и 28 дешифратора 9 приводит к появлению сигнала логический О на выходе 16 логической
схемы 13 ИПИ-НЕ. Аналогично переключаются и остальные логические схемы 1А и 15 ИЛИ-НЕ (моменты времени t,
t., tj и tg). Таким образом, на выходах преобразователя формируется вре менная последовательность импульсов и 16 J и IY и и ,g , порядок следования которых однозначно определяет направление вращения вентильного электродвигателя в начале такта коммутации. При данном порядке следования сигналов и,с , и„ , U,Q (интервал времени
Чб
17
18
t, - t7) на выходе элементов 6 памяти сигнал логическая 1 не формируется. Вследствие того, что в момент появления сигнала логической 1, например , на первом (информационном) входе 4 элемента 6 памяти (моменты времени t и t) на втором (разрешающем) входе 5, а следовательно, и на доминирующем входе Установка нуля RS-триггера 33 присутствует сигнал и,7 логическая 1, запрещающий прохождение сигнала, сформированного диффереН1 ;ирующей цепью 31, на вход Установка единицы RS-триггера 33, Поэтому данному направлению вращения соответствует низкий выходной потенциал U сумматора 2.
При изменении направления вращения вентильного электродвигателя на противоположное (момент времени t) изменяется порядок следования импульсов в каналах датчика 1 положения ивдуктора, а следовательно, и на выходах 22-30 дешифратора 9, и на выходах 16-18 логических схем 13-15 ИЛИ- НЕ. В момент времени tg происходит первая после изменения направления вращения смена информации в каналах датчика 1 положения индуктора. При этом появление сигнала логическая 1 на первом (информационном) входе 4 одного из элементов памяти, в данном случае сигнала U выходе. 17, происходит при наличии сигнала
логический О на втором (разрешающем) входе 5 (сигнал U,g ), поэтому единичньй /импульс, сформированный на выходе дифферен1щрующей цепи 31 приводит к появлению логической 1 на выходе RS-триггера, а следовательно, и на( выходе 39 логического сумматора 2. Аналогично переключаются и остальные элементы 6 памяти. Появление сигналов логическая 1 , U и U;jg на выходах 36-38 элементов 6 памяти, а на выходе 39 логического
12529018
сумматора 2 высокого выходного потенциала соответствует направлению вращения вентильного электродвигате5
10
15
ля вправо (интервал времени t - t ) При очередном изменении направления вращения (момент времени t ) Ш Шульсы потенциала логическая 1 снова исчезнут на выходах 36-38 элементов 6 памяти при первой смене информации в каналах 10-12 датчика 1 положения индуктора (момент времени t, ).
Изменение выходного сигнала устройства для определения направления враЩения вентильного электродвигателя происходит с угловыми погрешностями
8,
и
S,
относительно истинного
положения индуктора при смене направления вращения. Однако каждая из них не будет превьшать погрешности
(Нин определяемой разрешающей способностью датчика 1 положения индуктора, выполненного в данном.случае .
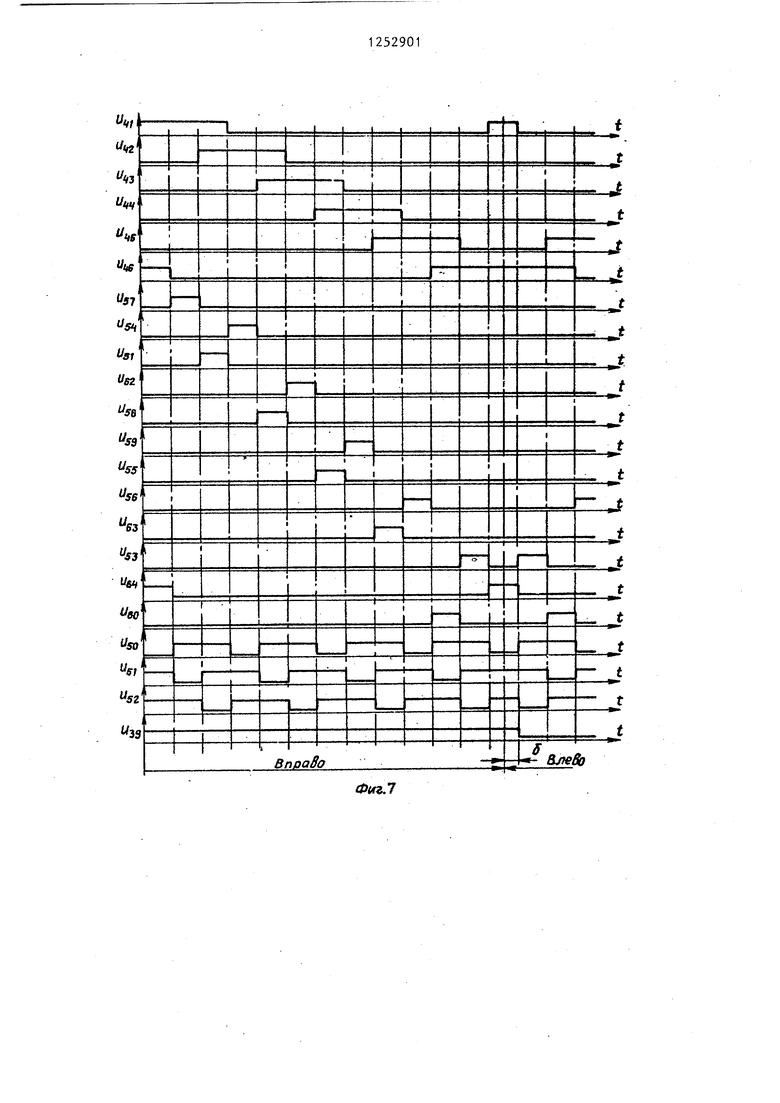
Устройство для определения направления вращения вентильного электродвигателя с числом пар полюсов р 1 и шестиканальным датчиком положения . индуктора, формирующим сигналы с коэффициентом заполнения К 0,25, работает аналогично. На выходе преобразователя 3 с отношением п/ 4 на основании анализа комбинаций сигналов с выходов шестиканального датчика 1 положения индуктора формируются временые последовательности сиг0
5
0
налов и
50
и
я
(фиг. 7) дли- т ельностью . :;-, смещенные по кольцевой схеме друг относительно друга на угол 2V/np
217/12 1 7, с периодом повторяе- с ь
2 ii l 21. 3 /ii
мости T-TO .
пр ь12 2
При этом порядок следования импульсов с выходов 50-52 преобразователя 3 однозначно определяет направ-
: ление вращения вентильного электро, двигателя.
Изобретение не претерпевает каких-либо изменений при выполнении датчика 1 положения индуктора с лю- бьм количеством каналов. Для нормального функционирования устройства необходимо только соблюдение сформулированного условия, касающегося форми.рования выходных сигналов, коэффициФ о р м у л а
10 изобретения
ект заполнения которых подчиняется соотношению К К/2т, где 3 Ki га - нечетное число (фиг, 8, где Устройство для определения направга 5, К 3, К,, 0,3).ления вращения вентильного электроВ случае, когда коэффициент запол- s двигателя с числом пар полюсов р и
нения выходных сигналов датчика 1т-канальным датчиком положения индукположения индуктора не подчиняется,тора, обеспечивающем п тактов коммупредлагаемому соотношению, например
0,4 при m 5, К 4 (фиг. 9), .информация на выходе датчика 1 изменяется чгерез угол 2., т.е. аналогично случаю, когда коэффициент заполнения выбирается из условия нормального функционирования ключей преобразователя частоты. При этом невозможно сформировать на выходе преобразователя 3 последовательность сигналов на периоде повторяемости, рав- цом половине периода следования выход10
тации на угле 21Т/р, содержащее логический сумматор и группу из двух- входовых элементов памяти, выходы которых подключены к входам логического сумматора, отличающеености путем устранения неоднозначнос- 15 ти выходной характеристики, оно дополнительно снабжено функциональным преобразователем с f-выходными каналами, где J 3, выполненным с возможностью формирования в каждом выных сигналов пятиканального датчика 1 20 ходном канале сигналов длительностью
21 52 н21ГГ
- на периоде повторяемости с
рп.рп
2 фазовым сдвигом -, указанный функ25 циональный преобразователь подключен входами к выходу га-канального датчика положения индуктора, первый и второй входы i-ro элемента памяти подключены к i-му и (i + 1)-му выход30 ным каналам функционального преобразователя соответственно, образуя по указанным подключениям кольцевую схему, а датчик положения индуктора вьшолнен с возможностью формирования
положения индуктора 2 ii l/np
к , преобразователь 3 функционирует в этом случае как повторитель. Повышение точности определения направления вращения вентильного электродвигателя достигается путем устранения неоднозначности выходной характеристики и позволяет довести указанную,точность до разрешающей способности используемого датчика положения индуктора. При этом, в сравнении с известными техническими решениями, решающими ту же техническую заДачу, изобретение проще требу- выходных сигналов, коэффициент заполет меньших схемо-технических. затрат,нения которых подчиняется соотношечто следует из сравнения их принци-ниш К/2т, где 3 К m - нечетное
пиальных схем.число.
10 изобретения
для определения направ
тации на угле 21Т/р, содержащее логический сумматор и группу из двух- входовых элементов памяти, выходы которых подключены к входам логического сумматора, отличающеености путем устранения неоднозначнос- ти выходной характеристики, оно дополнительно снабжено функциональным преобразователем с f-выходными каналами, где J 3, выполненным с возможностью формирования в каждом выФи.
.5
L J J--i--j-. i f fi
4тмт-,,«г::,тяптя; г J I I { (,%.- - - - - - - --Ь -. { .i.----r i u s ™ ,-™„.,..„.„,„..,.„.-,.,.„,„.. p
i s 15fi i
. j I1 I j j I L..,.,. L«.,4
„.„.(,,.i™:. --J- 4.-«..b.....
- .I..J-J-,,..,„„„,..„„.
.
Фиг.7
Редактор П.Коссей
Составитель В.Катаев Техред Л.Сердюкова
Заказ 5151Тираж 631Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная, 4
Jf
2П
Фиг.8
Фиг. 9
Корректор Л.Пилипенко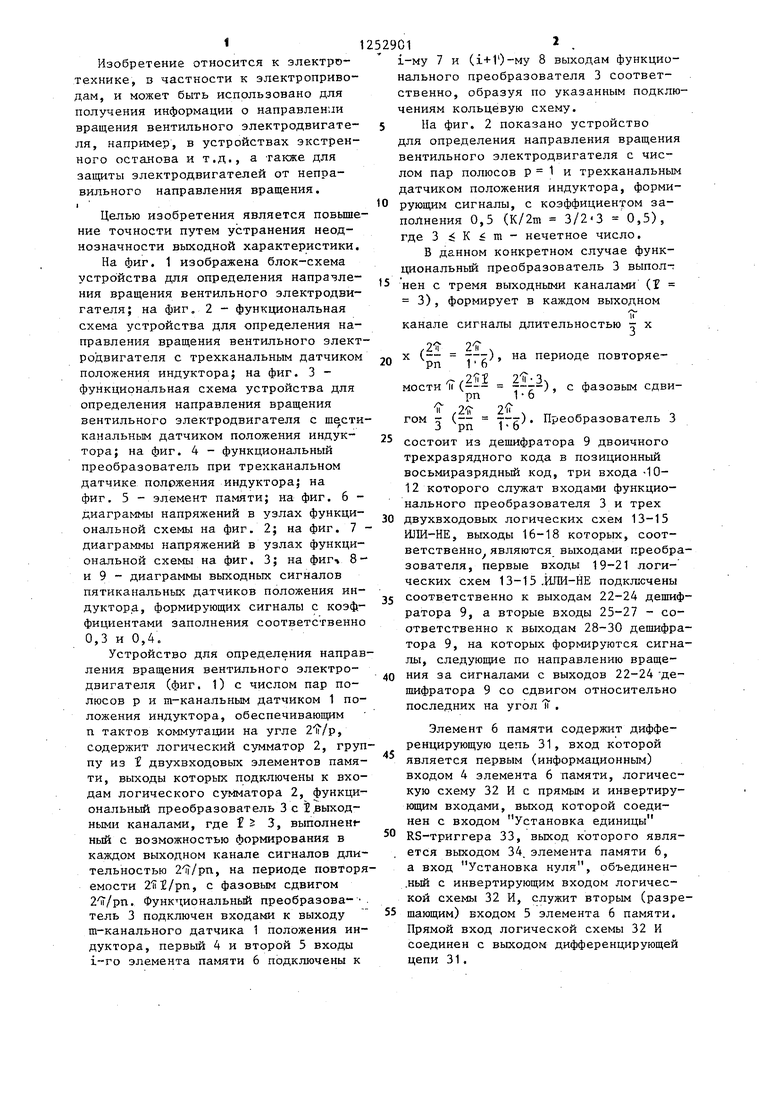
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения направления вращения вала вентильного электродвигателя | 1984 |
|
SU1251278A1 |
| Устройство для управления вентильным электродвигателем | 1984 |
|
SU1259462A1 |
| Устройство для управления вентильным электродвигателем | 1983 |
|
SU1166255A1 |
| Многодвигательный электропривод | 1981 |
|
SU1023613A2 |
| Вентильный электродвигатель | 1984 |
|
SU1325632A1 |
| Вентильный электродвигатель | 1984 |
|
SU1241364A1 |
| Устройство для управления вентильным электродвигателем | 1985 |
|
SU1302413A2 |
| Реверсивный вентильный электродвигатель с регулируемым торможением | 1985 |
|
SU1283928A1 |
| Устройство для управления вентильным электродвигателем | 1981 |
|
SU1029369A1 |
| Вентильный электродвигатель | 1985 |
|
SU1259430A1 |
Изобретение относится к электротехнике, в частности к электроприводу, и может найти применение для получения информации о направлении вращения вентильного электродвигателя и защиты его от неправильного направления вращения. Целью изобретения является повышение то чности путем устранения неоднозначности выходной характеристики. При вращении вентильного электродвигателя, имеющего число пар полюсов р, с т-канального датчика 1 положения индуктора, обеспечивающего п тактов коммутации на угле 2 м/р, сигналы поступают на входы функционального преобразователя 3 с f-Быходными каналами, где IS 3, выполненного с возможностью формирования в каждом выходном канале сигналов длительностью 2 ii /pn на периоде повторяемости с фазовым сдвигом 2.1| /рп. Устройство содержит I- двухвходовых элементов 6 памяти. Первый и второй входы i-ro элемента памяти подключены к i-му и (1+1)-му выходным каналам функционального .преобразователя 3 соответственно, образуя по указанным подключениям кольцевую схему. Выходы элементов памяти 6 связаны с входами логического сумматора 2. Датчик 1 положения индуктора выполнен с возможностью формирования выходных сигналов, коэффициент заполнения которых подчиняется соотношению К/2га, где 3 К m - нечетное число . 9 ил. СО 43j 43: fz и43j f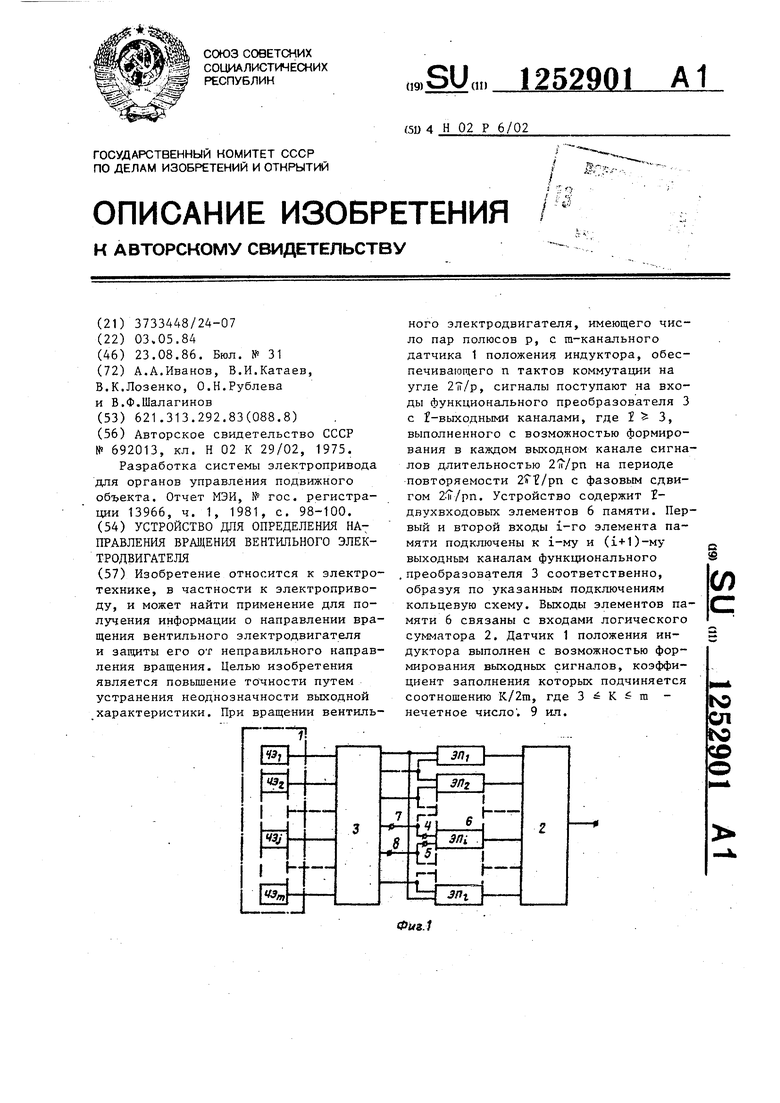
| Вентильный двигатель | 1975 |
|
SU692013A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Разработка системы электропривода для органов управления подвижного объекта | |||
| Отчет МЭИ, № гос | |||
| Многокамерная газовая печь непрерывного действия | 1927 |
|
SU13966A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Дорожная спиртовая кухня | 1918 |
|
SU98A1 |
